Zonrör
Roboten är försedd med ett zonrör (Pulser Range Gate ProximityFuze) vars uppgift är att detonera stridsdelen vid rätt tillfälle och rätt avstånd för att få maximal förstörande verkan i målet.
Zonröret består av en pulsradar och två sändar- och två mottagarantenner. Pulsradarn är monterad i stridsdelsrummet, framför stridsdelen.
De fyra slitsantennerna är monterade runt robotens skal på sådant sätt att mottagarantennerna sitter diagonalt mitt emot varandra och det gör även sändarantennerna men mitt mellan motagarantennerna.Antennerna är 69 cm långa och 12 cm breda och väger 0,75 kg styck.
Zonrör.
Källa: FMV.
Zonrör.
Foto: Håkan Wall.
Zonrörsantenn markerad med röd pil.
Under antennen är kroppen uppsågad för att visa stridsdelen.
Foto: Håkan Wall.

En uppsättning zonrörsantenner, alla antenner hade olika anslutningskopplingar för att säkerställa att de monterades på rätt plats.
Foto: UeliHeiz, Bloodhound museum, Schweiz.
Zonrörets placering intill stridsdelen.
Foto: British Aircraft Corp Ltd via Ingmar Persson.
Zonröret aktiveras när roboten är nära målet. Pulsradarn har en effekt på 7,5 KW med en pulsrepetionsfrekvens på 10 kHz(10.000 pulser per sekund).Varje mottagarantenn tar emot reflekterade pulser i 65 graders vinkel i förhållande till robotens längdaxel.
Tillsammans täcker de in en kon med toppvinkel på 130 grader vilket medför att ett mål känns av under alla tänkbara inflygningsvinklar och hastigheter.
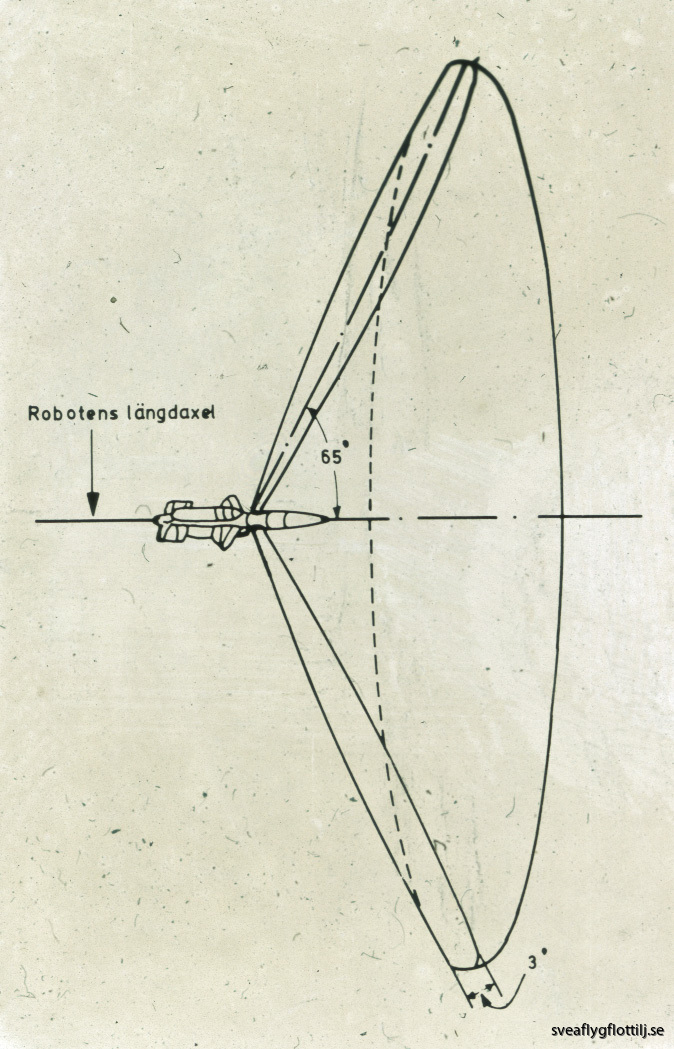
Sändarens täckningsgrad.
Källa: FMV.
Målflygplanets alla försök till undanmanöver är meningslösa. Mottagarantennerna matar signalen till 2 kanaler, en kanal som har stor känslighet för mål inom avstånd 10-110 fot (3-34 m) och en kanal som känner av mål inom 0-10 fot (0-3 m).En pulsräknare i zonröret räknar reflekterade pulser, den räknar alltid 7 pulser från senaste träff. Om alla 7 blir träff tror zonröret något är fel eller att roboten är för nära marken, om det blir 4 eller färre träffar är det troligen falska signaler och i bägge dessa fall utlöser inte stridsdelen. Vid 5 eller 6 träffar skickas en strömpuls till säkerhet- och armeringsdonet som utlöser stridsdelen.Detta förfarande gäller den först nämnda kanalen (10-110 fot), vid registrerade pulser i den andra kanalen (0-10 fot) utlöses stridsdelen efter 2 pulser i följd.
Motståndarens enda chans att undkomma är att kopiera zonrörets pulser och lura zonröret att spränga stridsdelen i förtid. För att förhindra detta är inte zonröret aktiverat förrän i slutet av anflygningen och dess pulser är nycklade (kodade). Zonröret rensar bort alla returnerade signaler som inte är dess egen. Eftersom en kopiering av signalen är systemets svagaste punkt var också zonröret och dess antenner det allra hemligaste av det hemliga. På robotarna var alltid zonrörsantennerna övertäckta för att dölja deras längd och därmed avslöja vilken frekvens de använder. På TELUB fanns ett särskilt zonrörsrum där bara särskilt utbildad personal fick tillträde vid service och tester. Om signalen var unik för varje zonrör eller samma för samtliga har inte gått att få fram, varken via servicepersonal i Sverige eller via engelska kontakter.
I ett försök att åskådliggöra zonrörets arbetssätt följer här en förenklad beräkning. Vi tänker oss att en robot går mot ett mål på kontrakurs, roboten och målflygplanets sammanlagda hastighet är 3.900 km/h. Avståndet mellan dem minskar då med 1.083 m/sekund. I det ögonblick som zonröret får sin första pulsretur (vid 34 m till målet) återstår 0,0314 sekunder innan kollisionen är ett faktum. Under den tiden det tar zonröret att motta 7 pulser minskar avståndet med ca 0,75 m och sedan ska stridsdelen utlösas på optimalt avstånd till målet.