Belysningsradar (brr)
Författat av Håkan Wall.
Belysningsradar Ferranti Firelight, type 86 (TIR= Target Illuminating Radar)
Det fanns 12 stycken belysningsradar (brr) i Sverige. De hade individnummer 501 -512 och fördelades på förbanden enligt nedan;
F 8: 501, 502, 503, 504
F 10: 508, 511
F 12: 509, 512
F 13: 505, 506
F 17: 507, 510
Belysningsradar med individnummer 501 fanns i samma robotförband som robotgruppcentral (rbgc) med individnummer 1001, liksom 502:an och 1002:an o.s.v.
Militärt reg.nr på några av fordonen: 501/81026, 502/81411, 505/86359, 507/93572, 509/86359, 510/121908, 511/122095, 512/122124 (via Nils-Olof Karlberg).
En belysningsradar har till uppgift att;
- Hitta det utpekade målet.
- Följa och belysa målet så att reflekterande strålningen uppfångas av robotens målsökare.
- Sända referenssignal till roboten på lavett.
- Sända olika typer av kommandon till roboten i flygfasen.
- Visa målets läge i rymden.
- Ge information till rbgc om störförhållanden i roboten.
I stationen tjänstgör en radartekniker, han har telefonkontakt med rbgc.
Beredskapsgrader
I den lägsta beredskapsgraden är brr helt frånslagen. Om kraftförsörjning är inkopplad fungerar belysning och telefonutrustning.
Nästa beredskapsgrad är ”7 min”. Det innebär att huvudströmställaren är tillslagen och luftkonditioneringsenheten är igång.
Vid ”1 min” beredskap är brr fullt uppstartad med undantag för sändarens högspänning.
Vid ”högsta” är brr klar att börja målsökningen. Nu kan även signaler sändas till robot på lavett via markreferensantennerna.
Användning i systemet
När robotgruppen ska insättas mot mål går brr till ”högsta”. Normalt erhåller rbgc måldata från STRIL-systemet. Dessa data skickar rbgc vidare till brr som ställer in antennens sid- och höjdvinkel. I brr finns ett antal sökprogram inbyggda som väljs med automatik utifrån måldatans noggrannhet, sökningen sker i sidled, höjdled och fart. När en reflekterande signal tas emot görs en jämförelse mellan denna signal och den erhållna signalen från rbgc för att fastställa att bägge signalerna kommer från samma brr. Om så är fallet avbryts målsökningen och en automatisk målföljning startar. I samma ögonblick börjar information om målets läge och fart överföras till rbgc. Dessa uppgifter är av största vikt för de beräkningar som görs i datamaskinen i rbgc och de presenteras också för robotstridsledaren. Brr följer målet fram tills att roboten träffar detta.
I det fall att måldata saknas från luftförsvarscentral (Lfc) kan brr användas som spaningsradar. De avsöker en sektor som är vald av robotstridsledaren. Alla funna mål rapporteras till rbgc för manuellt beslut av robotstridsledaren.

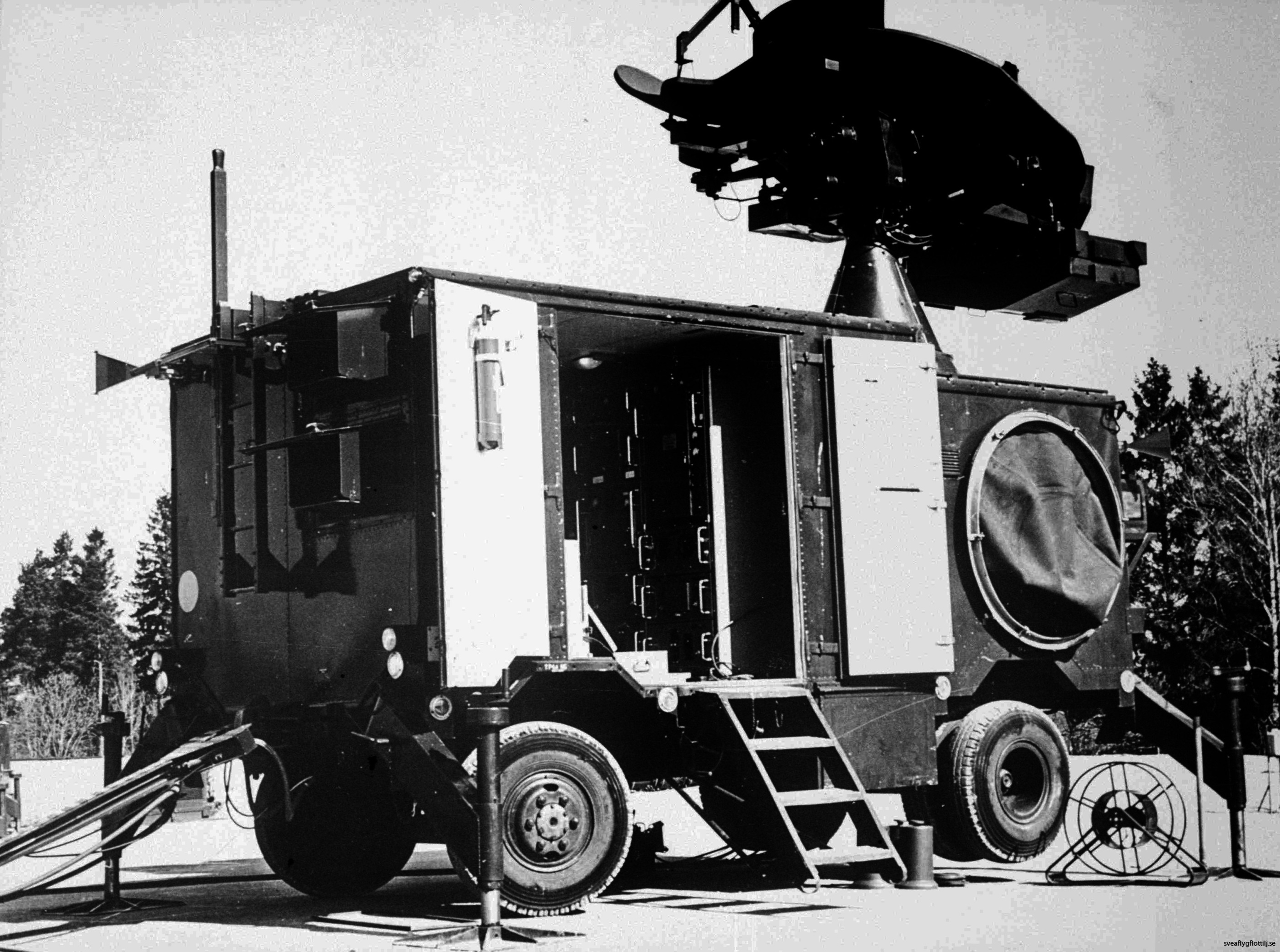
På denna vagn på F8 syns samtliga antenner.
Foto: via Cleive Hornstrand.
Brr på F10 med antenn i nedfällt läge, skyddet för att vädersäkra vagnen med demonterad antenn hänger till höger om dörren.
Foto: Göran Svensson, F 10.
Vagnen
Radarstationen är inrymd i en tvåaxlad släpvagn,med dubbelhjul på bakaxeln, som bogseras av en terränglastbil, en sexton-växlad Volvo 941. Vid längre transporter monteras antennen bort och fraktas i en speciell transportbur på dragfordonet. Hastighet under transport får uppgå till max 30 km, vid korta, långsamma förflyttningar kan antennen sänkas till halvt nedfällt läge där den låses fast.
Vagnen är 4,9 m lång och 2,6 m bred. Höjd med antenn 5,25 m, utan antenn 2,97 m. Vikten utan antenn är 9,8 ton. Någon exakt totalvikt på antennen har inte gått att hitta. Nils-Olov Freij som var radartekniker på F10 och delaktig i framställande av hanteringsinstruktionen till lyftoket uppskattar vikten till ca 700 kg. Vilket överensstämmer med att lyftoket är anpassat för en vikt på 700 kg.
Vagnen är uppbyggd på en stålram med ett ytterskal av aluminium och ett innerskal av träfiberplattor. Mellan skalen finns ett värmeisolerande lager av glasfiber. Taket är täckt med strålningsabsorberande material,på delar av detta ligger trallvirke att gå på vid arbete på taket. Utanpå bakre väggen sitter två motorgenerator (Ward-Leonardaggregat) som ingår i systemet för styrning av antennen i sid- och höjdled och i tre av vagnens hörn, strax under takhöjd, finns markreferensantenner monterade.De sitter i de bakre hörnen samt vänster främre hörn och är vridbara i 270° vilket ger täckning i 360°. På utsidan av främre väggen sitter takstegen och ovanför denna taksäkerhetsbrytaren, en stolpe på knappt en meter, som man var tvungen att fälla för att bryta strömmen till antennen när arbete skulle utföras på taket.
Vid gruppering måste vagnen stå horisontalt, för att åstadkomma detta finns fyra domkrafter som är monterade i varje hörn och infällda vid transport, dessutom finns ett vattenpass för att underlätta horisontering av radarn. För att vagnen ska stå stadigt finns lösa markplattor att lägga under domkrafterna. Under vagnen finns en rörstump fastsvetsad, vid gruppering ska detta rör placeras över den s.k. TIR-punkten på grupperingsplatsen, denna punkt består också av en rörstump ingjuten i betong. TIR-punkten är inmätt och inlagd i STRIL 60 systemetoch för att ge rätt invisningsdata måste vagnen stå på rätt plats.
Interiört är vagnen uppdelad i två sektioner,en sektion med normal takhöjd och en sektion under antennen med lägre takhöjd. Sektionen med normal takhöjd har en dubbel ingångsdörr på vagnens vänstra sida och innehåller luftkonditioneringsenhet, manöverbord, videoenhet samt sändarstativets framsida. Det här är radarteknikerns arbetsplats. I den andra delen av vagnen finns kopplingsboxar, kraftenhet, kylaggregat för sändaren och anordningar för höjning och sänkning av antennenheten samt sektorspärr. Här finns en del golvyta som radarteknikern kunde utnyttja som sovplats under övningar, tältsäng eller liggunderlag direkt på golvet var det som gällde.
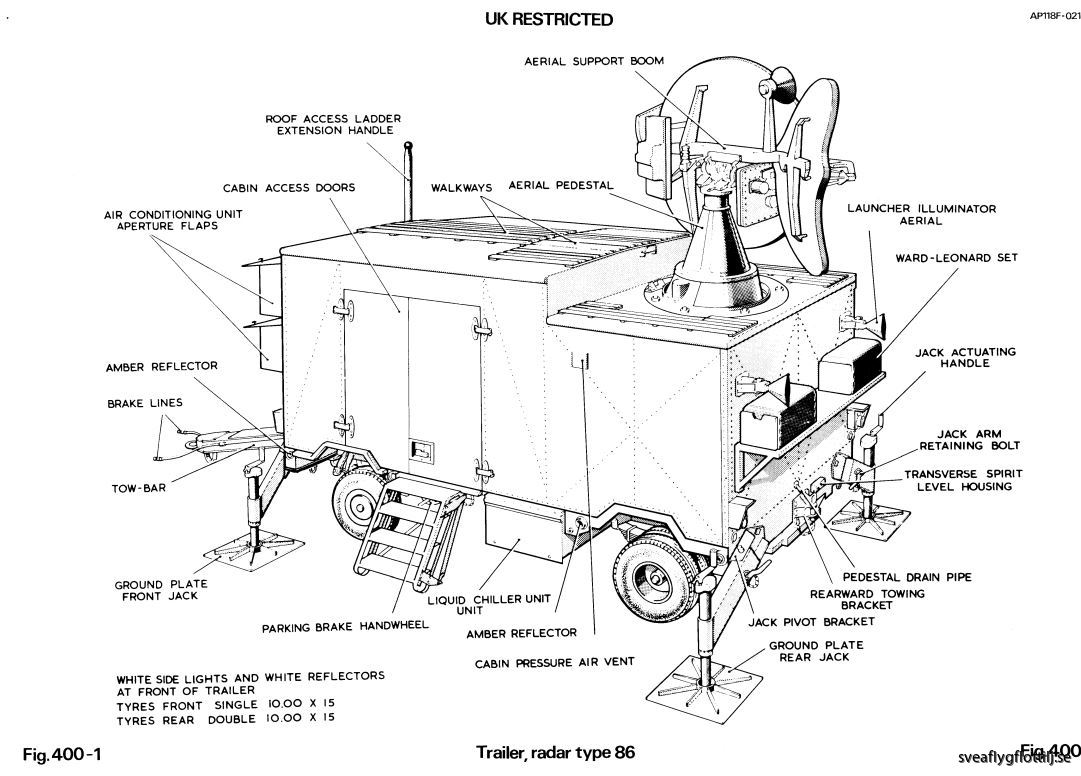
Skiss från engelska originalhandlingar.
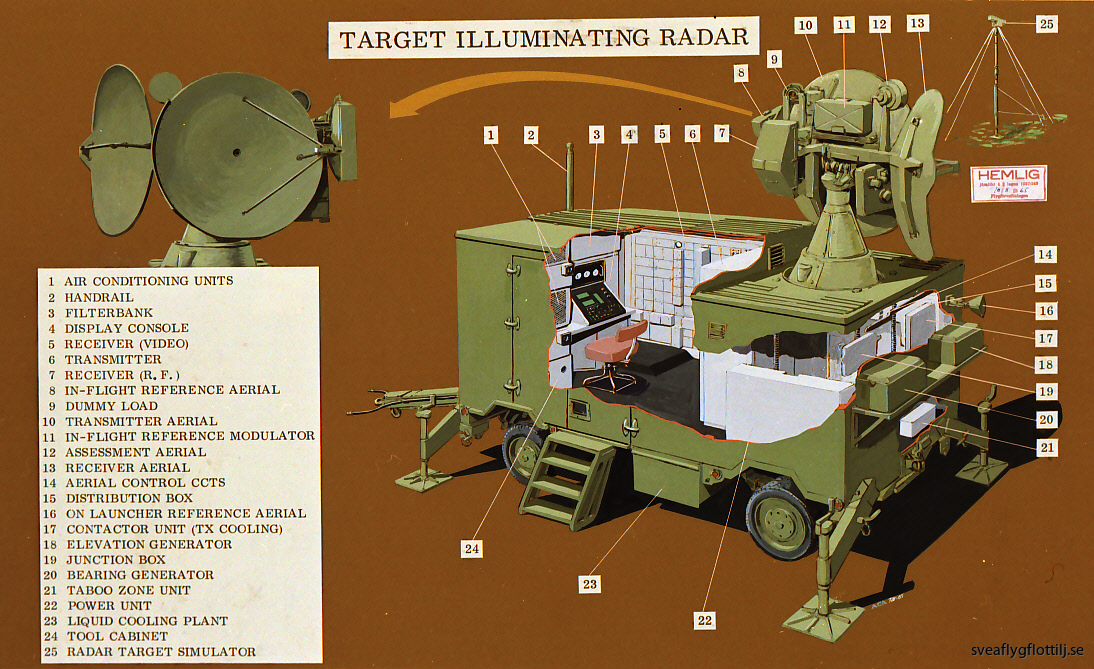
Trots engelsk text visar denna skiss en svensk vagn. Nr 9 är konstantennen och nr 21 sektorspärrenheten.
Bild: via Arboga Robotmuseum.
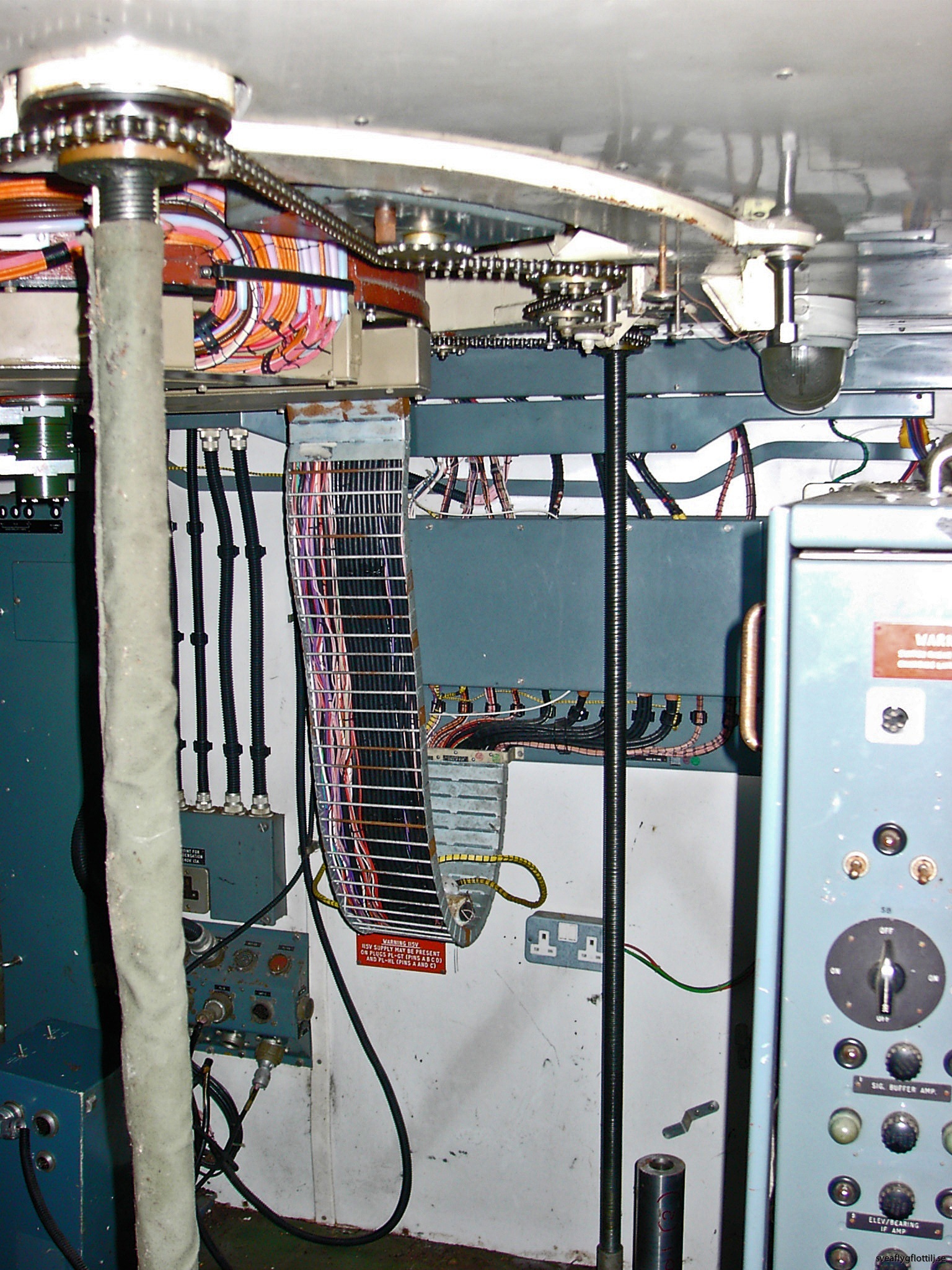
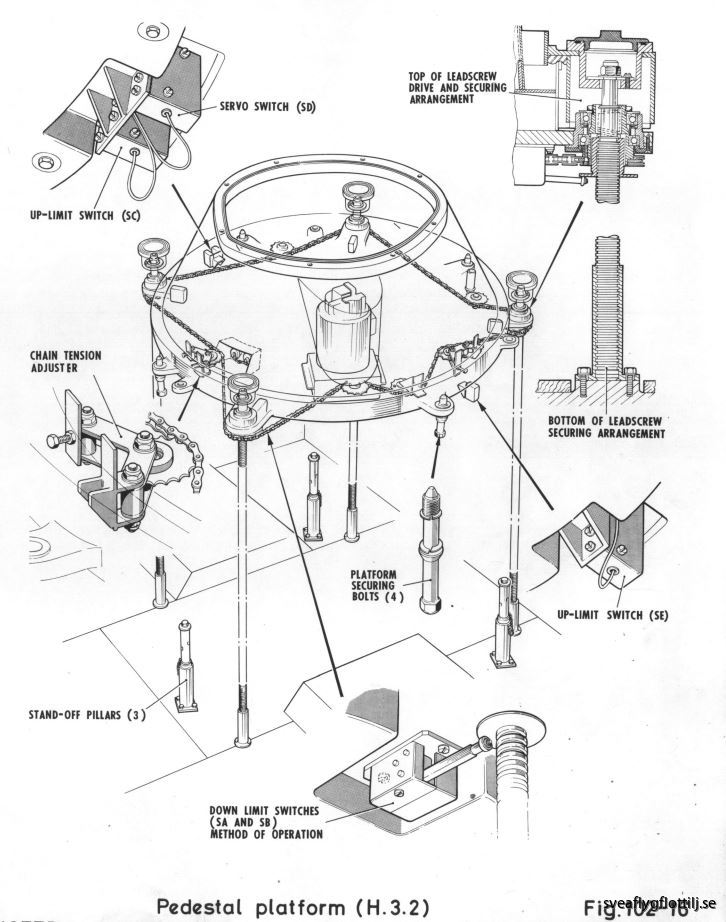
Detta är den enda bild vi hittat som visar utrymmet under antennen. Det var här radarteknikerna sov. De vertikala stängerna (som totalt var 4 stycken) och kedjan som löper runt dessa används för att höja/sänka antennpiedestalen. Det grova, svarta, rör som står intill den högra stången är bottenläge där piedestalen skruvades fast under transport. Kabelstegen mitt i bild ansluter i sin övre del till kabelvindan, konstruktionen är böjbar så att inte kablarna skadas när piedestalen höjs eller sänks.
Den enhet till höger som endast delvis syns är kraftenheten. Bilden är tagen i 501:an som är återställd i RAF-standard så några detaljer kan skilja sig från den svenska versionen. De mindre boxarna på bakre väggen med många anslutna kablar samt den blåaktiga lådan som verkar stå direkt på golvet är med största sannolikhet ett engelskt påfund. I de svenska vagnarna satt sektorspärrskivan på den bakre väggen.
Foto: via BMPG

Ovan: De mörka boxarna är till höger höjdgeneratorn och till vänster bäringsgeneratorn, notera även de dubbla hjulen på bakaxeln.
Foto: via BMPG
Till Vänster: Skiss på piedestalens höj/sänk system från engelska originalhandlingar.
Antenner
Förutom markreferensantennerna är övriga antenner monterade på en antennbalk som i sin turär fäst på antennpiedestalen. Samtliga antenner på balken är vridbara både i sid- och höjdvinkelled.Dessutom är antennpiedestalen vridbar i tre varv. Sidvinkelväxellådan sitter inuti piedestalen medan höjdvinkelväxellådan sitter på antennbalken. I piedestalen finns även en kabelvinda liknande den som även finns i lavetten.
På antennbalken sitter sändarantenn, flygreferensantenn, mottagarantenn och en störmottagarantenn (även kallad störbestämningsantenn). På balkens baksida sitter en mottagarenhet.
Sändarantennens uppgift är att belysa målet med en smal lob med hög effekt. Stationen är en dopplerradar så all utsänd energi är kontinuerlig på x-bandet (cw-målföljning =continuouswave).Antennen är en parabolantenn, 2,1 m i diameter. Effekten är mellan 2.500 – 3.000 watt. Räckvidden är ca 20 mil i längdriktning och ca 20.000 meter i höjdriktning.
Flygreferensantennen har till uppgift att förse roboten med måldata från rbgcs datamaskin under flygfasen, den måste därför ha en lobbredd som täcker den maximala vinkeln som kan uppstå mellan roboten och målet. Lösning på detta är en ostantennsom ger en bred täckning i horisontalled och smal täckning i vertikalled.
Mottagarantennen är en elliptisk parabol, 2,15 x 0,77 m, dess uppgift är att säkerställa rätt position på målet så att målföljningen blir korrekt. Mottagarhornet är uppdelat i fyra lika stora kvadrater. Genom att jämföra den mottagna signalen i de två övre kvadraterna med de två undre erhålls en signal som styr antennen rätt i höjdled. Om signalstyrkan blir lika stark i samtliga kanaler ligger antennen rätt, om signalstyrkan blir olika i de fyra kanalerna görs justering av antennen. På motsvarande sätt jämförs signalen i de två högra kvadraterna med de två vänstra för att styra antennen i sidled.
Störmottagarantennenär en liknande antenn som robotens målsökarantenn. Den mäter upp störsituationen som robotens målsökare bedöms uppleva. Robotstridsledaren får med denna information en uppfattning om vilken typ av störning roboten blir utsatt för.
Markreferensantennerna består av tre stycken identiskt lika hornantenner, en eller flera av dem kan användas samtidigt. De kan användas med eller utan spridare, med spridare ger de 140° lob-bredd i sidvinkelled, utan spridare är lob-bredden 52°. När grupperingsplatsen är byggd så att de två lavettgrupperna står vitt skilda (sett från radarn) bör man använda flera horn utan spridare. Om lavettgrupperna istället står tillsammans (även det sett från radarn) är det bättre att använda ett horn med spridare. Antennerna förser roboten med signaler för klargöringen via lavettens markreferensantenn. Kennet Erlandsson, som var radartekniker på F17, berättar att de brukade funktionstesta dessa antenner genom att sticka in ett 8w lysrör i hornet, om detta då tändes upp med ett svagt blått sken så fungerade antennen.
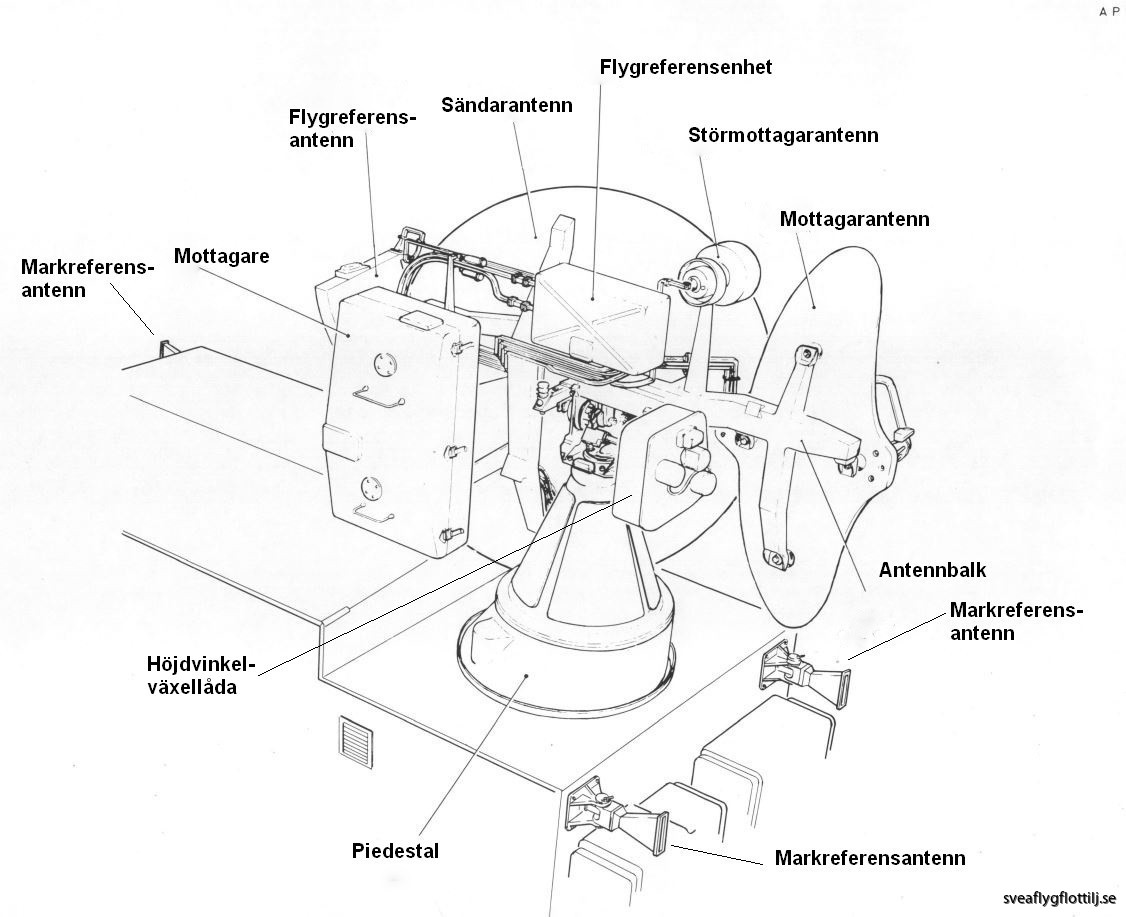
Samtliga antenner. Skiss från engelska originalhandlingar, kompletterad med svensk text av Håkan Wall.
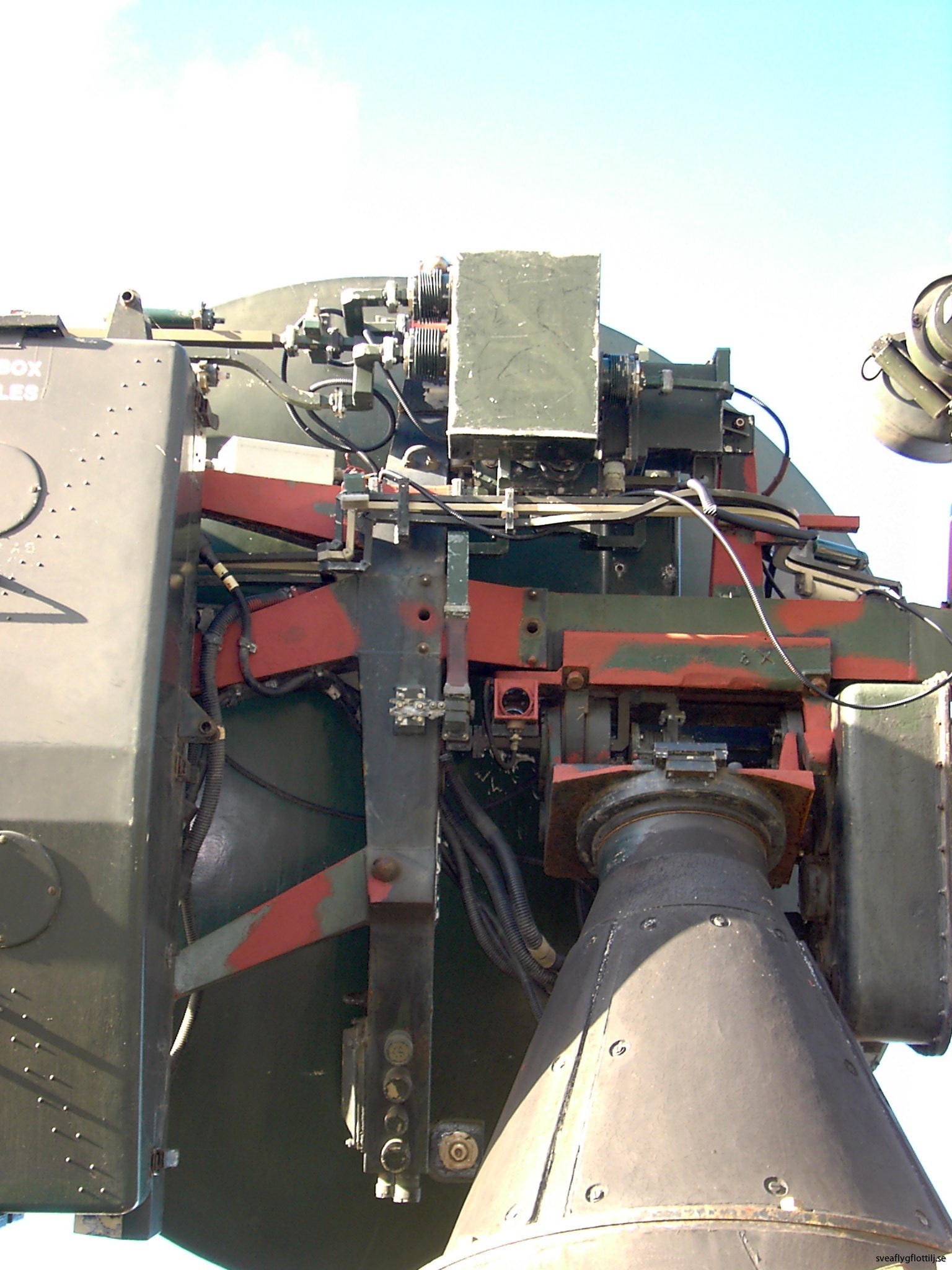
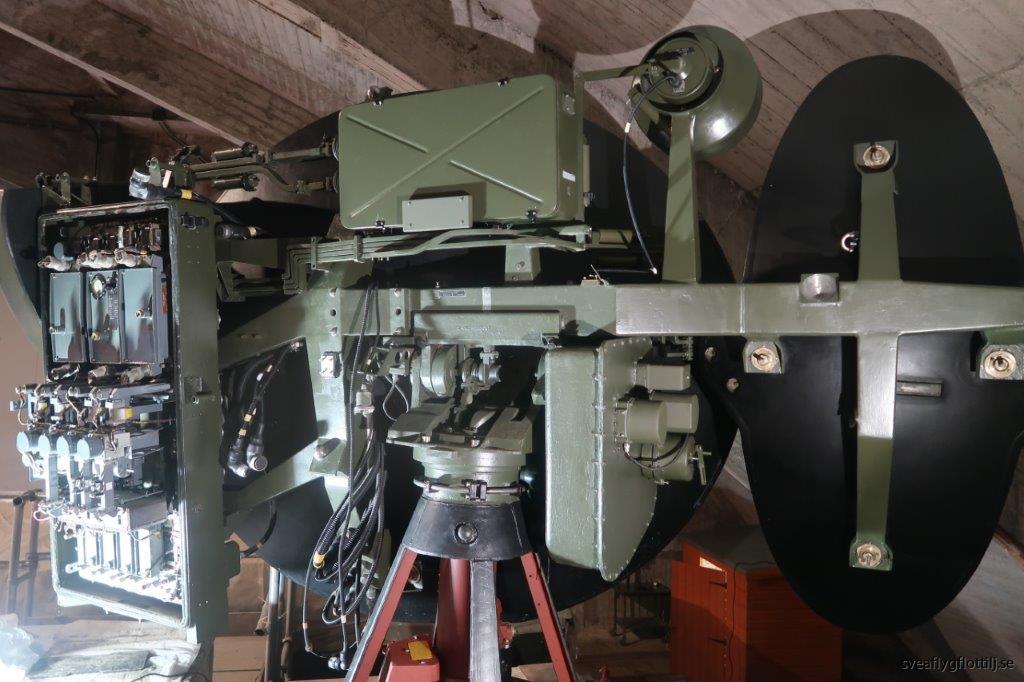
Antennpiedestalen samt delar av antennbalken.
Foto via BMPG.


Lådan med handtagen på är sändaren, framför den sitter sändarantennen. Till vänster om sändaren, delvis skymd, sitter flygreferensantennen. Foto via BMPG.

Antennbalken och dess kablar. Skiss från engelska originalhandlingar.
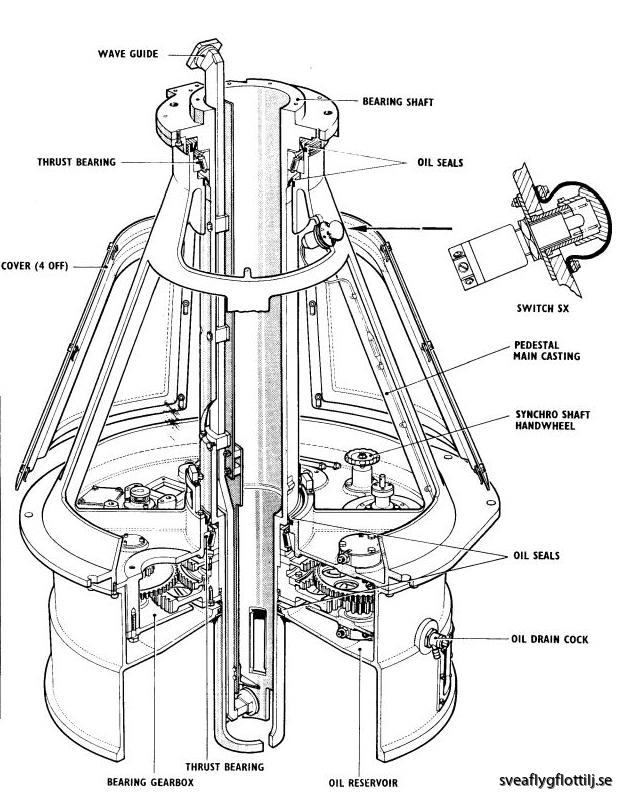
Piedestalen. Skiss från engelska originalhandlingar.
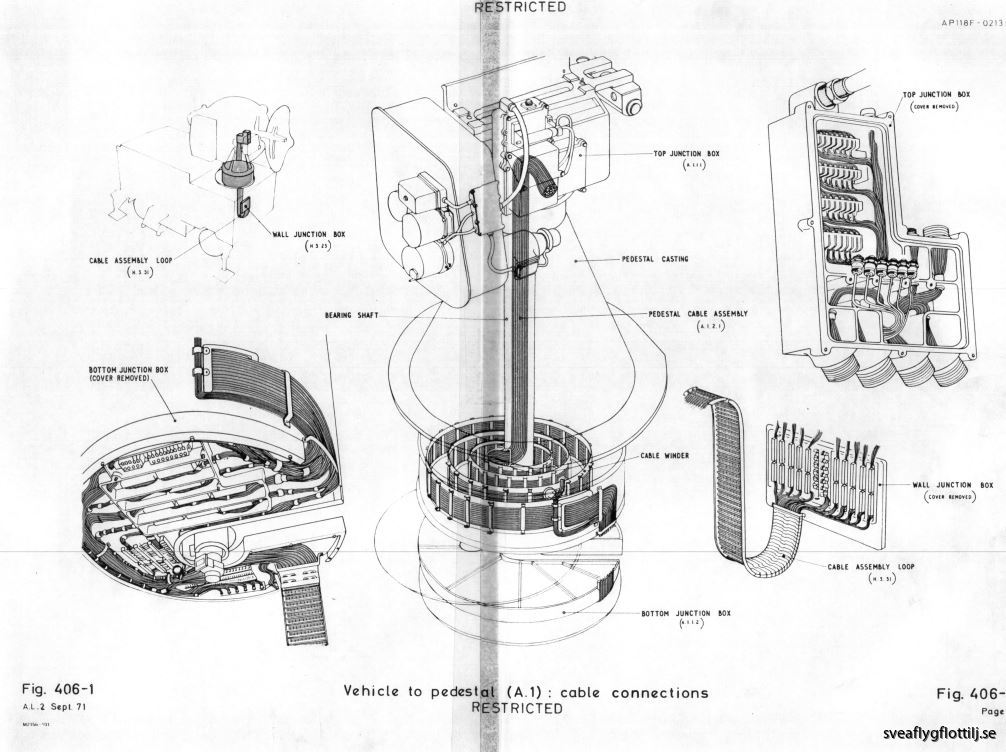
Piedestalen med kablar och kabelvinda. Skiss från engelska originalhandlingar.
Förutom ovan nämnda antenner finns även konstantenn (även kallad konstlast) samt tillhörande riktkopplaremonterad på antennen. Den fanns bara på de för Sverige byggda vagnarna eftersom vi var angelägna att kunna utnyttja radartystnad av signalspaningsskäl men även i händelse av anfall med radarsökande robot. I övriga länder som använde systemet fanns ingen risk för signalspaning, hos oss fanns ständigt denna risk med vår kust mot Östersjön,därför konstruerades denna speciallösning. De gånger man behöver testa vagnens funktionsduglighet, exempelvis vid service och reparationer, vill man inte sända ut strålning via sändarantennen. Då kan man med en fiffig konstruktion med riktkopplaren som innehöll skjutbara kolvar i vågledaren för att koppla om så att signalen istället går till konstlasten som är en vågledarslinga som omvandlar sändareffekten till värme. Då röjer man inte sin position för eventuell signalspaning.
Sändarstativet.
Bild via Arboga Robotmuseum.
En annan enhet som bara finns i den svenska varianten är en sektorspärrenhet. Sändning kan ske i tre olika höjdskikt. Sektorspärrenheten består av tre runda skivor som var markerade från 0° till 360°, en för varje höjdskikt. Genom att täcka en viss del av skivan med folie förhindrar man att sändning sker i denna sektor i just detta höjdskikt. Det finns flera anledningar till detta förfarande, att man inte vill sända österut i fredstid är en, en annan är att man vill begränsa sändning på låg höjd i riktningar där det finns människor och/eller byggnader. Vid det tillfälle en sektor är spärrad går sändningen till konstlasten istället för till sändarantennen.
Inför transport demonteras hela antennenheten och fraktas i en transportbur som består av en rörstomme med presenning. Piedestalen sänks ner i vagnen och hålet i taket vädersäkras med ett väderskydd. Med denursprungliga lyftanordningen från tillverkaren var detta en svår och tidsödande procedur. På F10 utvecklades ett nytt lyftok som underlättade väsentligt (mer om detta finns i separat stycke).
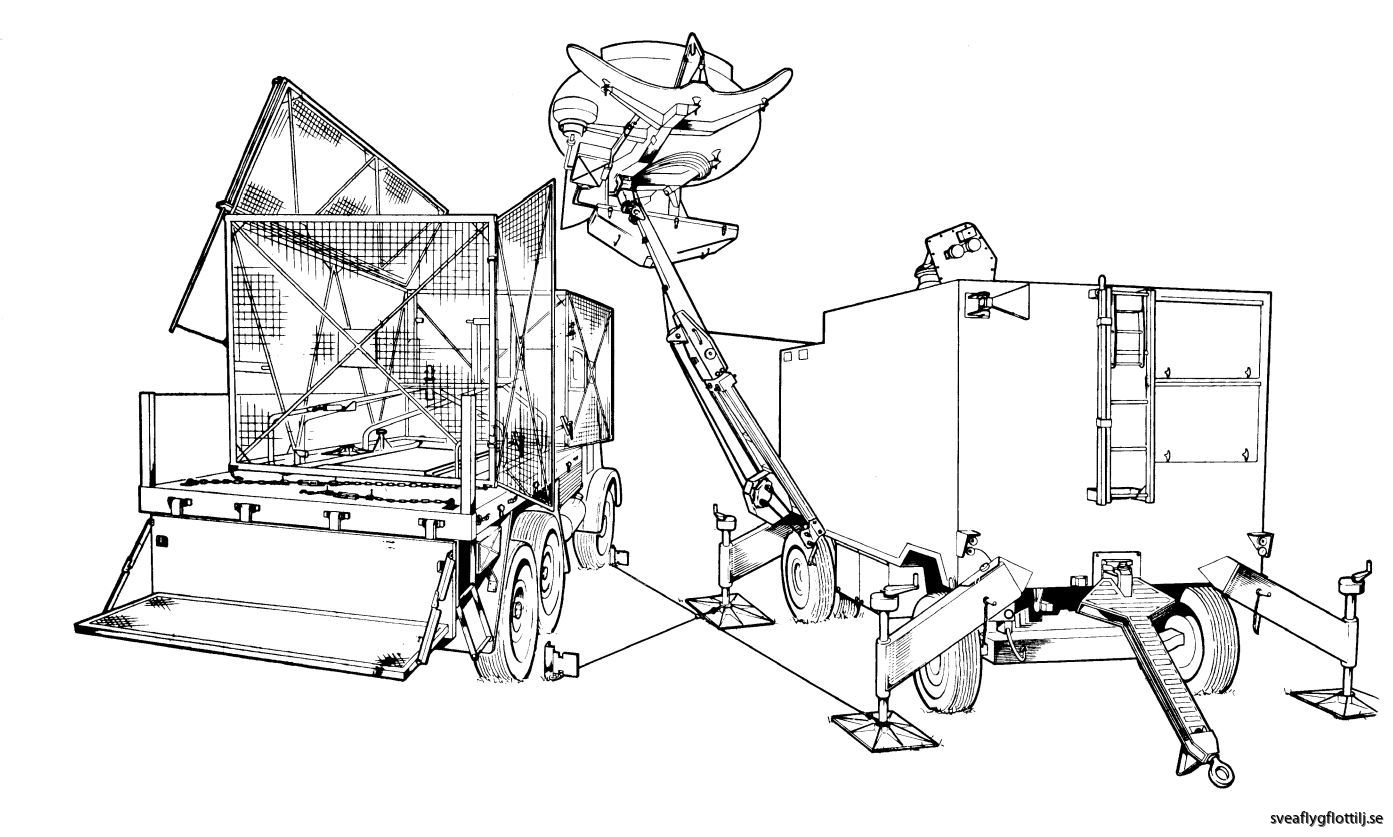
Skissen visar den engelska originalutrustningen för att lyfta antennen. Skiss från engelska originalhandlingar.






Ovan: bilder från F13 visar hur mycket enklare lyftet var med det svenska lyftoket. Notera att taksäkerhetsbrytaren är fälld enligt gällande säkerhetsinstruktion.
Foto: Hans Ferhnström.
Mitten i undre raden: på denna bild från F8 placeras antennen i antennburen.
Foto via Cleive Hornstrand.
Nederst till höger: transportbur för antennen.
Foto via Arboga Robotmuseum.
Interiör i kabinen
Direkt till vänster innanför dörren finns luftkonditioneringsenheten utmed främre kortsida. Bredvid finns manöverbordet och över detta filterbanken. Videoenheten täcker höger långsida och mitt på golvet står sändarstativet.
Luftkonditioneringsenhetens uppgift är att hålla en lämplig temperatur i kabinen, för personal och elektronik.
Manöverbordet omfattar, förutom ett manöverbord, kontrollenheter och en elgonenhet. På operatörens manöverbord finns de manöverorgan och den indikeringsutrustning som krävs för att brr ska kunna manövreras av en operatör i kabinen. Normalt manövreras den från rbgc, dels manuellt och dels automatiskt. Indikering sker med olikfärgade lampor samt två stycken horisontella indikatorer, det ena för kommande mål och det andra för gående mål. Visa lampor är enbart för upplysande information medan vissa kräver åtgärd.
Uppstart av brr sker från manöverbordet. Nedan följer en beskrivning av några viktiga funktioner. Med MAINS ON kopplas strömmen på (7 min. beredskap), när RADAR ON trycks in går vagnen upp i 1 min. beredskap. Dessa funktioner kan också styras direkt från rbgc. Med TIR READY meddelar operatören rbgc att brr är funktionsduglig. STAND BY tänds när lfc beordrar högsta beredskap. ACQUIRE tänds när lfc sänder invisningsdata för målsökning, antennen ställer in sig mot den anvisade positionen. ON TARGET tänds när radarn låst på målet, signalen går samtidigt till rbgc och lfc.Om videoenheten registrerar förekomsten av bredbandig brusstörning som dränker målsignalen tänds lampan PASSIVE TRACKING och antennen följer bruskällan.
Rbgc-simulatorn är monterad till vänster över manöverbordet. Enheten kan ersätta rbgc så att kontroll och tester kan göras av brr utan att rbgc behöver vara inkopplad.
Filterbanken är placerad över manöverbordet, denna enhet används endast i samband med att radarn används för manuell sökning. Detta görs i de fall kontakt saknas med lfc och robotgruppen ska leta efter egna mål eller om invisningsdata från STRIL inte är tillräckligt bra. Om man t.ex har förvarning om annalkande mål på låg höjd kanske målet inledningsvis
ligger under radarns horisont. Då väljer man att svepa med antennen något i sidled precis över horisonten. Om STRIL´s höjdmätning är osäker, eller ibland saknas, sveper man antennen lite i sidled och mycket i höjdled. Val av sökmönstergörs av robotstridsledaren. Då söker man efter mål i ett stort område, det gör att man tar emot en stor mängd signaler varav många är helt ointressanta. Filterbanken är i princip tolv parallella mottagarkanaler som vardera täcker ett 4 kHz brett dopplerområde från 1 till 49 kHz. Detta möjliggör att mål kan sökas och hittas snabbare än vid normal målsökning då mottagarens enda kanal sveper hela frekvensspektrat eller delar av det.De tolv kanalerna består av skarpa bandpassfilter uppbyggda av kvartskristaller och utsignalen anger om svaret är störeko (störning) eller tyst eko (flygplan) samt i vilket dopplerfrekvensområde svaret ligger. Frekvenserna som täcks motsvarar en radiell målhastighet på från nära 0 till Mach 2,2. Filterbanken kräver kalibrering var tredje månad med speciell testutrustning, detta gjordes av servicetekniker från Telub.
Mätenheten sitter på väggen mellan manöverbordet och videoenheten och består av omkopplare och mätinstrument som möjliggör en snabb kontroll av spänningsnivåer och väsentliga signaler vid såväl vid drift som vid tester och felsökning. Enheten är ett lättillgängligt hjälpmedel för radarteknikern. Dessutom innehöll enheten möjlighet att mäta mikrovågsdioder, viktiga för radarn prestanda.
Videoenheten består av närmare 150 kretskort, de flesta är ca 12 x 12 cm, monterade bakom ett metallock i en aluminiumram. Kretskorten är förbundna med spiralförbindning (wire wrapping) som är en tillförlitlig teknik, men med nackdelen att montering eller demontering är tidsödande. Efter att signalerna passerat mottagarenheten på antennen når de videoenheten, här sker huvuddelen av signalbehandlingen i mottagaren. Resultatet presenteras på indikatorer i brr och rbgc eller matas vidare till andra enheter i radarn. De viktigaste funktionerna är:
- Mäta avståndet till målet genom att den mottagna reflekterade signalens fasläge jämförs med fasläget på den för stunden utsända signalen. Skillnaden i fasläge omräknas till målavstånd.
- Identifieringskontroll, enheten kontrollerar att det är stationens egen sändare som sänt signalen man tar emot, det görs genom att jämföra den mottagna signalen med en signal som sändaren överför till videoenheten.
- Mäta signalstyrkan på den mottagna signalen. Starkast signalstyrka erhålls när målet ligger mitt i radarloben, ju närmare utkanten av loben målet kommer ju svagare blir signalen. Denna mätning används för styrning av antennen i höjd- och sidvinkel.
- Fastställa målets hastighet genom att mäta ”dopplereffekten”. Om målet är kommande (alltså närmar sig) blir den mottagna signalfrekvensen högre än sändfrekvensen. Är målet gående (avlägsnar sig) blir den mottagna signalfrekvensen lägre än sändfrekvensen. Vid så kallad nolldopplergenomgång byter målet riktning från att vara kommande till att bli gående, eller tvärt om,till exempel om målet på avstånd passerar förbi radarn.
- Hantera korsande mål. Eftersom radarn låser på målets dopplerfrevens innebär det att om målet gör någon form av U-sväng kan den radiella hastigheten under någon tid bli noll och radarnhar då ingen signal att följa. För att komma över denna svaghet genereras i videoenheten en speciell ”blindföljningsfunktion” som påverkar antennrörelsen för att öka möjligheten att åter fånga målet när det passerat nollgenomgången och vid behov utökas antennsökmönstret.
- Att med inkommande signaler via störmottagarantennen mäta brus- och störförhållanden och vidarebefordra detta till rbgc.
- Att vid sökning skicka tillgänglig måldata till sökmönstergeneratorn som på grundval av den informationen väljer lämpligt sökmönster. Den väljer sökmönster efter följande variabler: avstånd, höjdvinkel, hastighet, lågflygande mål, spaning, stor vinkelsökning.
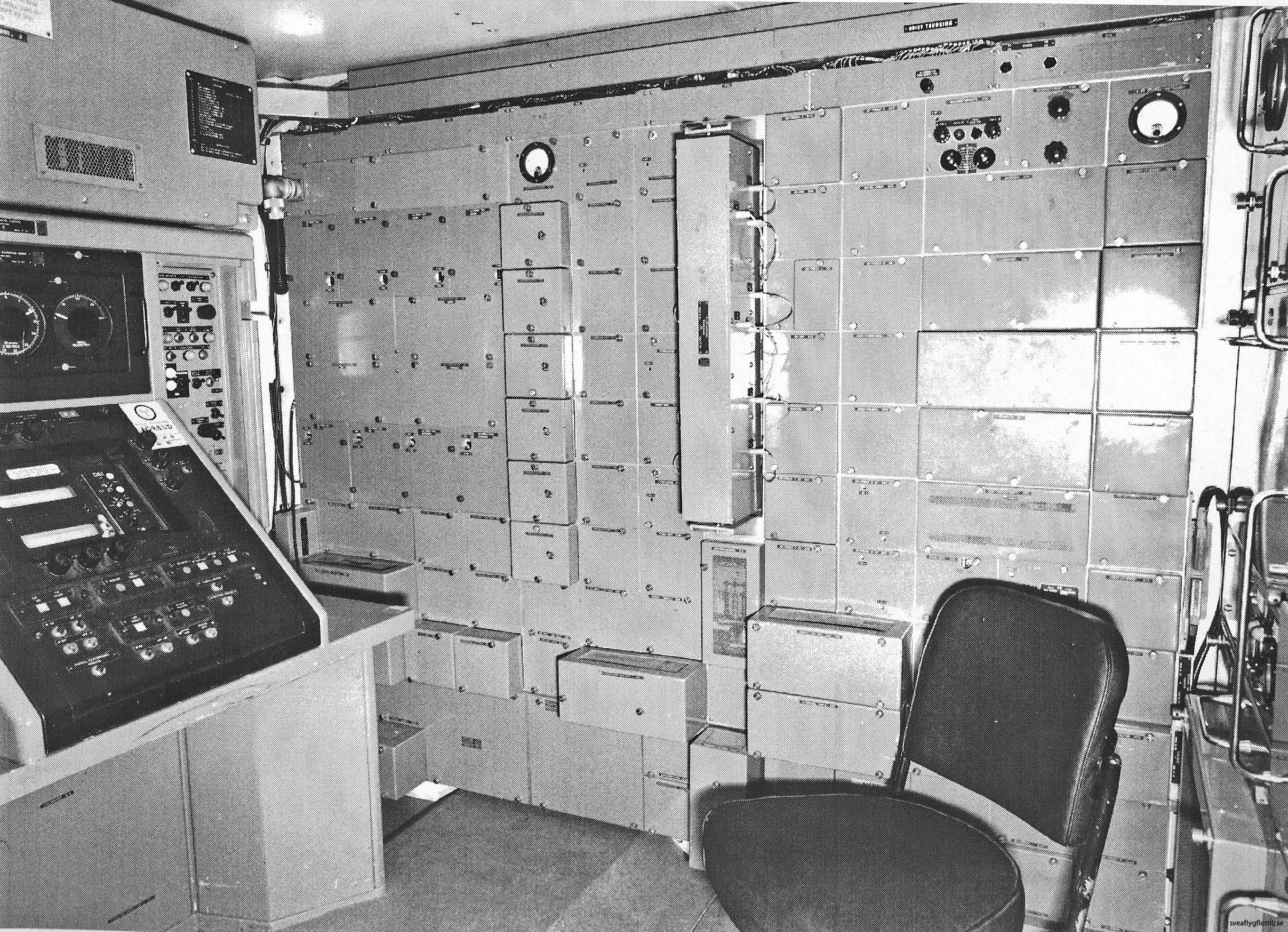
Kabinen, till vänster manöverbordet, till höger videoenheten.
Foto via Arboga robotmuseum.

Manöverbordet, ovanför detta filterbanken, högst upp i vänster hörn Rbgc-simulatorn, den lilla grå lådantill höger med två kablar är mätenheten. Foto via Arboga Robotmuseum
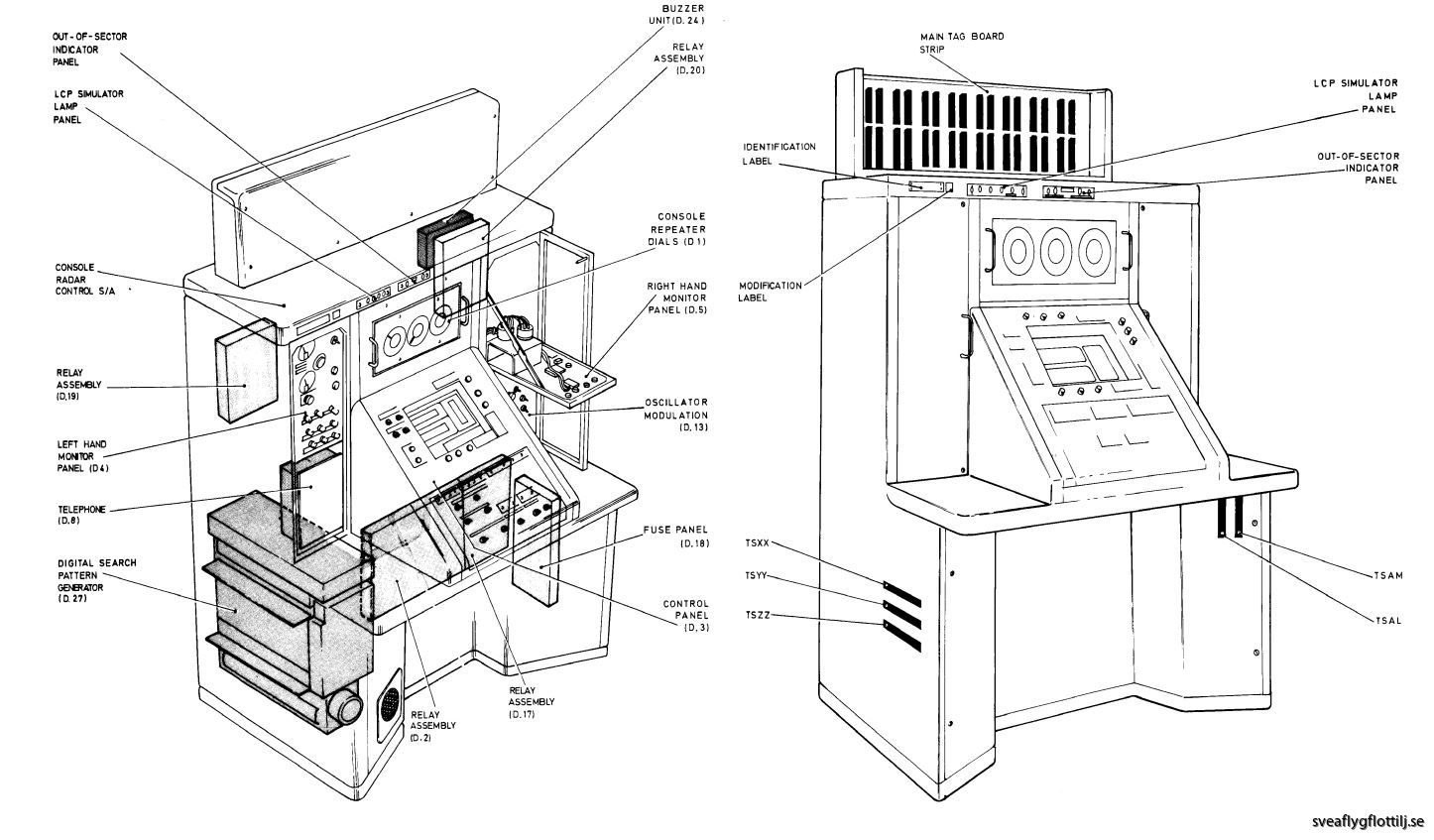
Manöverbordet. Skiss från engelska originalhandlingar.
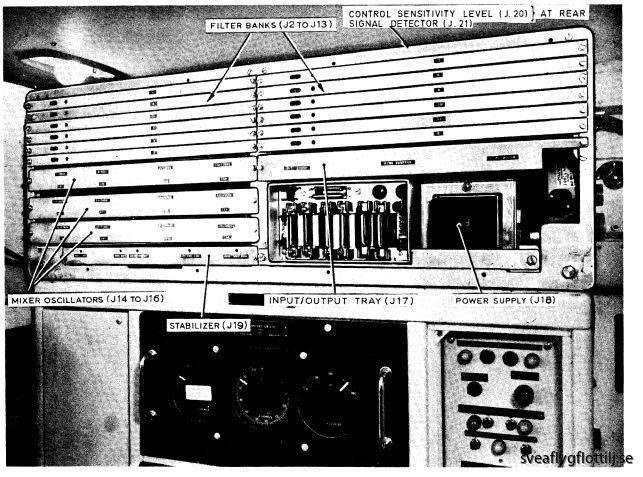
Filterbanken. Bild via engelska originalhandlingar´.
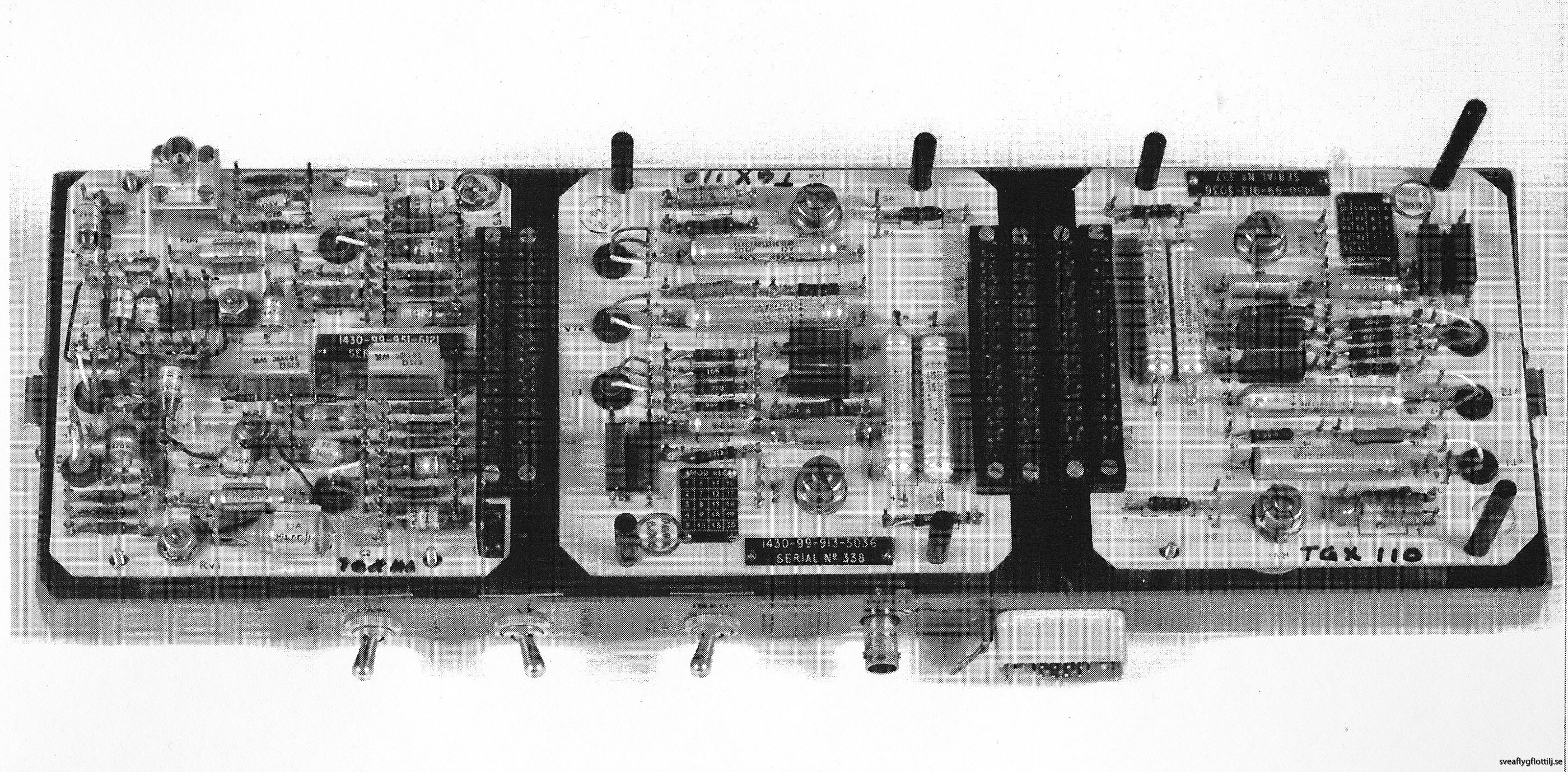
Enhet i videoenheten. Bild via engelska originalhandlingar.
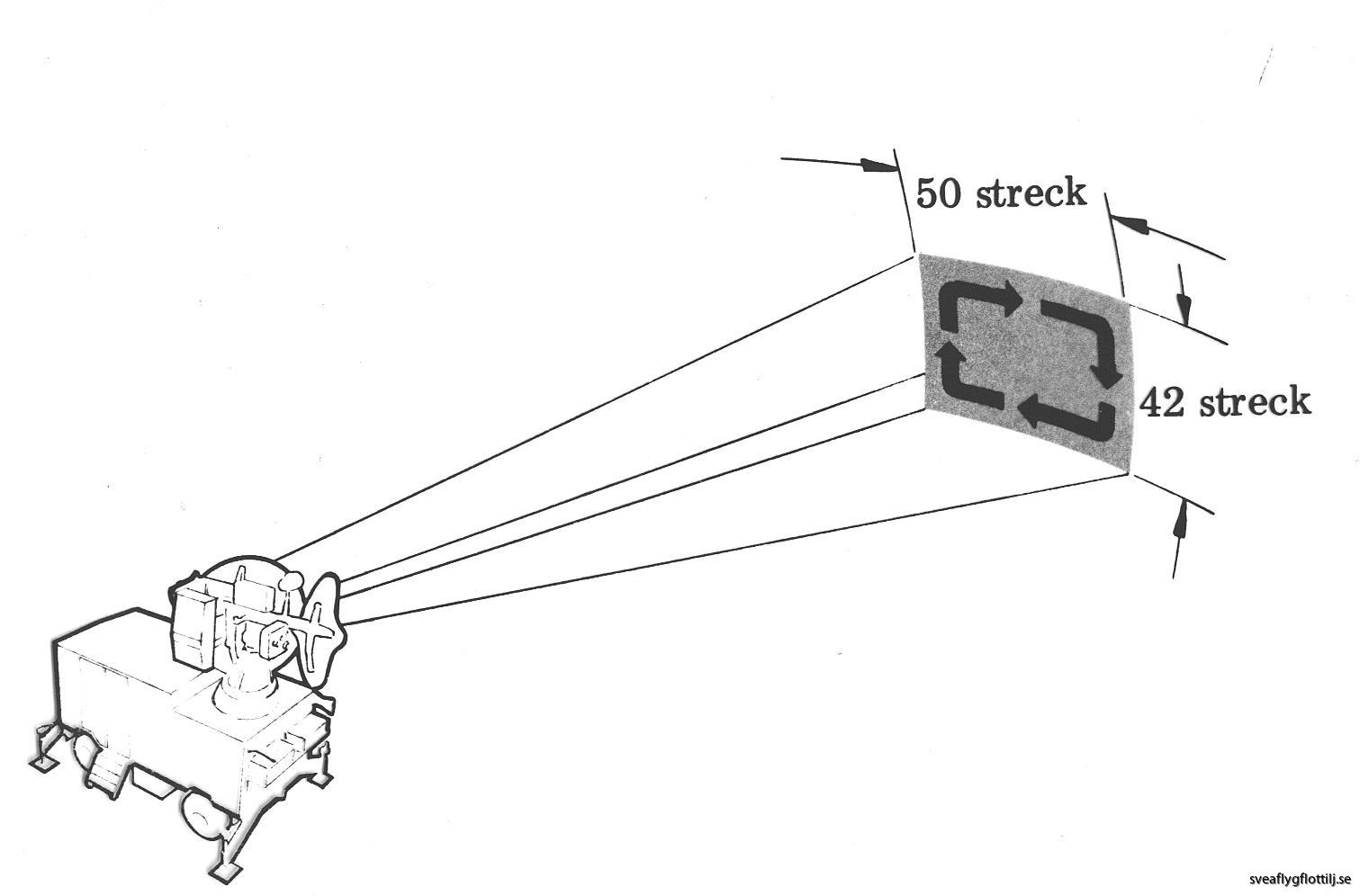

Ovan: sökprogram som robotstridsledaren kan välja mellan för manuell sökning.
Bilder via Arboga Robotmuseum.
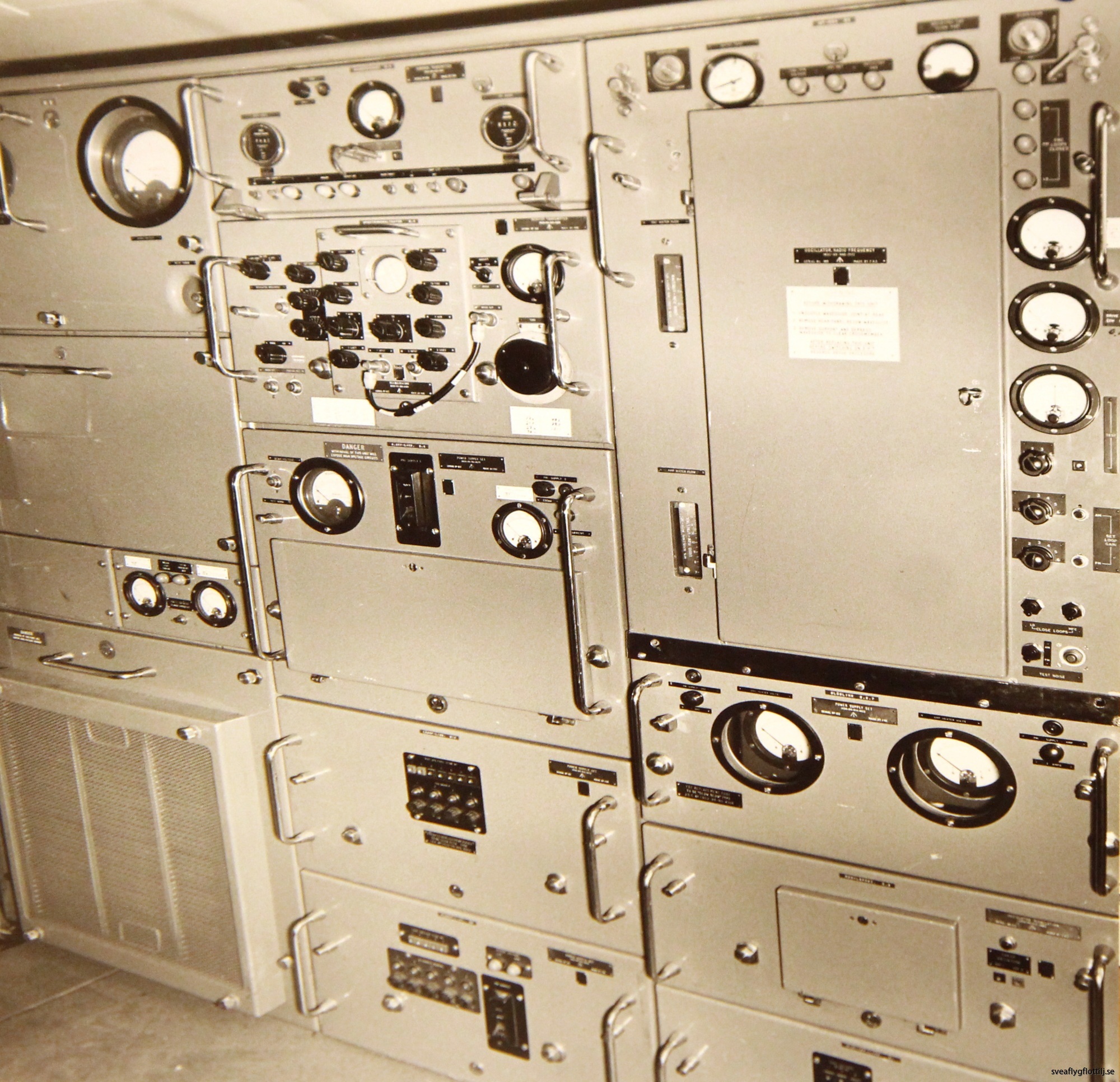
Sändarstativet består av 3 stativ. Det vänstra stativet innehåller enbart högspänningsenhet (13 kV) för effektklystronen.Det mittre stativet innehåller främst högspänningsenhet (6,8 kV) för oscillatorklystronen, spektrumanalysator, oscilloskop samt slutsteg för 600 kHz-sändaren.Det högra stativet innehåller huvuddelen av mikrovågsdetaljerna i sändaren såsom kavitet, oscillatorklystron, effektklystron som ger 2-3 kW kontinuerlig uteffekt till sändarantennen.
Dessutom finns en mängd vågledare, modulatorer och mätinstrument.
Huvudsändaren sänder en x-bandsignal via en vågledare och roterskarvar upp till sändarantennen på antennbommen och belyser utpekat mål, bärvågen ska även moduleras med en referenssignal för identifiering så att roboten vet att det är rätt brr som belyser målet. Dessutom användas den modulerade signalen för att möjliggöra avståndsmätning till målet.
Flygreferenssändaren sänder flygreferenssignalen till roboten, sändning sker på en underbärvåg till X-bandssignalen.
Markreferenssändare sänder en markreferenssignal till lavettens markreferensantenn, denna sändare är identisk med flygreferenssändaren men sändningen är fasmodulerad med 3 1/3 hz.
En principskiss för halvaktiv cw-målsökning som brr använde. (cw= continuous wave).
Bild via Arboga Robotmuseum.
Till vänster: sändarstativen.
Foto via Arboga Robotmuseum.
Ovan: bilden visar några enheter från sändaren. Bild via engelska originalhandlingar.
Närmålssimulatorn
För att kontrollera funktionen på brr fanns en möjlighet att simulera mål. För detta behövdes att en mast med en mottagare restes ca 100 meter från brr. Avståndet skiljer från varje grupperingsplats men kabeln är 150 meter så den får inte stå för långt bort. Den ursprungliga masten byttes ganska omgående ut mot en svensk fackverksmast, samma konstruktion som användes till radiolänkantennen. Då gjöts också ett mastfäste till denna, detta fäste är av exakt samma modell som användes till radiolänken förutom att detta är ojordat. Närmålssimulatornär en smal låda, ca två meter lång. Den innehåller ett mottagarhorn, en modulator och ett sändarhornsamt en brusgenerator på mikrovåg. Modulatorn modulerar den mottagna signalen med en10 kHz-signalså att den returnerade signalen visar ett mål med en hastighet på 0,5 M. Detta är en nödvändig ändring då dopplerradarn bara upptäcker kommande och gående mål och närmålssimulatorn rör sig ju inte alls. För att undvika risk för signalspaning står masten oftast i västlig eller nordlig riktning från brr, vid några få krigsgrupperingsplatser står den i sydlig riktning. Den enda avvikande platsen är :17 Lemmeströ där simulatormasten står i östlig riktning, det beror troligen på att inget annat alternativ fanns på denna plats.

Denna bild från :76, Bräkne Hoby, kan vara den enda bild som finns på en svensk simulatormast. Fackverksmasten var av samma typ som radiolänkmasten.
Foto Göran Svensson, F10.
Öde efter nedläggningen
När nerläggningen av förbanden genomfördes 1974 överfördes 501:an tillsammans med en rbgc från F 8 till F 17 för att användes som simulator, detta berättar Kennet Erlandsson. Brr ställs in i en hangar och rbgc placeras utanför.
Efter nedläggning omvandlas 6 stycken enheter, 507-512, till PS 44/R och ingår i STRIL 60. Kontrakt på försäljning av 3 stycken PE-44 skrivs 810929, köpare är MinistryofDefence (MOD). Objekten är 501, 502 och 505.
Ernst Håkansson från F 17 var med och skrotade brr vilket skedde på F 13, och han berättar att de skrotade tre vagnar, man plockade ur kretskort och klystroner. Allt antecknades på en förteckning. Vågledare packades (och gick till Telub?). Kretskorten klipptes sönder, resterande gick som skrot. Förteckningen sparades i bokförrådet till 1985.Arbetet tog två och en halv månad. Vid ett tillfälle skedde ett inbrottsförsök i hangaren vilket utreddes av polis och SÄPO.
1983 säljs även PS 44-vagnarna, 507-512 till MOD.
MOD köpte alltså totalt 9 enheter, listan nedan visar till vilket förband i RAF våra brr var placerade 1/10 1989, (uppgift saknas om 502 och 511).
- Bawdsey85 Sqn C Flt MS 7 'Yellow' 501 Ex Swedish Radar - Still Extant (BMPG Cosford)
- Barkston Heath25 Sqn A Flt MS 1 'Osprey' 505 Ex Swedish Radar
- West Raynham85 Sqn A Flt MS 2 'Black' 507 Ex Swedish Radar
- West Raynham85 Sqn A Flt MS 10 'Orange' 508 Ex Swedish Radar
- West Raynham85 Sqn A Flt MS 1 'Green' 509 Ex Swedish Radar
- Bawdsey85 Sqn C Flt MS 8 'Purple' 510 Ex Swedish Radar
- West Raynham85 Sqn A Flt MS 9 'Silver '512 Ex Swedish Radar
Idag finns endast 501:an kvar på RAF:s museum i Cosford. Den restaureras av BMPG (The Bloodhound Missile Preservation Group) till RAF Standard, vilket skiljer sig något från de svenska stationerna. Den kommer i framtiden att finnas på museum i England tillsammans med en restaurerad robot och övrig utrustning som användes av RAF-förbanden. Vi är mycket glada över att det blev en brr använd i Sverige som blev det enda bevarade exemplaret.

501:an innan påbörjad restaurering.
Foto: Pete Harry.

501:an har här kommit under tak och restaurering påbörjad. Foto: Pete Harry.

Nu har man kommit en bra bit på väg.
Foto: Pete Harry.

Antennerna är i bedrövligt skick.
Foto: Peter Harry.
Antennerna efter restaureringen.
Foto: Pete Harry.

Arbetet på 501:an pågår.
Foto: Pete Harry.

501:an, vänster sida.
Foto via BMPG.

Denna bild från mars 2023 visar den nu helt renoverade 501:an.
Bild via Pete Harris, BMPG.