Stridsledning
Författat av Håkan Wall.
Robot 68 var operativ i Flygvapnet under STRIL 60-perioden. Stridsledningen skedde från Lfc (luftförsvarscentral) typ 1. Förbanden på F 8 och F 13 var uppkopplade mot Lfc O5 i Bålsta och förbanden på
F 10, F 12 och F 17 var uppkopplade mot Lfc S1 i Hästveda. På ett tidigt stadium fanns även tankar att stridsledning skulle kunna ske från alternativa Lfc, vid den tiden fanns planer på att bygga fyra stycken
Lfc Typ 1 men O1 och S2 blev aldrig mer än planer. När Robot 68 blev operativ fanns ingen möjlighet att stridsleda robotförbanden som tillhörde O5 från S1 eller vice versa.
Det fanns dock en möjlighet att stridsleda från Rrgc (radargruppcentral), där fanns en robotledarplats förbered, denna fanns i samtliga Rrgc utom i Rrgc ÖN uppe i norr. Tanken var att ha ett alternativ om Lfc, eller förbindelsen till Lfc, blev utslaget. Övningar mot rrgc skedde, men hur ofta verkar skilja sig mellan förbanden.
Bo Lindberg, F10, har ett minne av att han tjänstgjort som robotledare på rrgc vid någon enstaka övning. På F 17 övade man ibland mot Rrgc Myran (S2syd), Bocken (S1ost) och Hinden (S1west). Benny Hellström berättar att läget på grupperingsplatsen måste matas in manuellt vid varje övning i Rrgc, den informationen fick inte lagras utan driftschef Rrgc hade informationen inlåst i kassaskåp. När F 13 övade mot Rrgc var det alltid mot Rockan (O1syd) minns Björn Sjöstedt. Klas Gröndahl på F 8 minns endast ett tillfälle med övning mot Rrgc.
På Lfc var i fredstid tjänsten som chefsrobotledare (Crbled) och robotledare (Rbled) obesatta då dessa endast ingick i krigsorganisationen och då bemannades med krigsplacerad personal, som Rbled var robotdivisionschefen krigsplacerad. Bo Lindberg berättar att när F 10 hade sina veckoövningar fick därför en av robotstridsledarna ta sig till Lfc och tillfälligt tjänstgöra som Rbled.
Trots att Crbled inte var på plats i Lfc i fredstid hade denne en hel del uppdrag både i fredstid och krigstid, det var olika ansvarsområden och arbetsuppgifter bl.a att ta fram bestämmelser och rutiner. Nedan följer en sammanställning av de viktigaste punkterna som i detta fall avser Crbled vid Lfc S1.
- Samordning av fredstjänsten på robotförband inom Milo Syd (Militärområde).
- Fortsatt teknisk och taktisk utprovning samt direktiv och föreskrifter för detta.
- Utbildning av personal i sektorledning och strilbataljon om robotsystem 68, speciellt vänder man sig till luftledare, jaktledare, biträdande jaktledare, chefsradarjaktledare och radarjaktledare.
- Kurschef och lärare vid Rbledkurser.
- Vid stridsspel i fred även delta med Robot 68. (detta är markerat som VIKTIGT).
- Utbildning av chefsradarjaktledare och radarjaktledare vid Rrgc i ledningfunktionen vid reservfall (om ledning via Lfc inte kan ske).
- Ansvara för insatsmetodik och fördelning jakt/Robot 68 med hänsyn till tillgång, hänsyn ska även tas till tillgång på Robot 67 och kanonluftvärn.
- Huvudskjutriktningar vid krigsgrupperingsplatser.
- Autonoma eldtillståndsområden med spaningssektorer vid arbetssätt K6 (se nedan)
- Arbetssätt vid K5 för alla krigsgrupperingsplatser.
- Bestämmelser för kontakt med jaktförbanden vid K6. Att i samråd med flygchef ta fram instruktioner för jaktens uppträdande vid K6-förhållanden, påverkan på patrullbanor mm. Även utbildning och genomgång med flygande personal.
- Krigsplacering av robotpersonal i Lfc.
- Krigsplanering och bestämmelser för robotstridsledning i fred och krig.
- I samråd med tekniska ledningen planlägga sambandsutbyggnaden till krigsgrupperingsplatser.
- Att till samtliga krigsgrupperingsplatser ta fram bekämpningslinjer, interceptpunkter med hänsyn taget till olika kurs, fart och höjd. Kompletterat med Robot 67 och luftvärn.
- Täckningsdiagran för belysningsradar (brr)
- Åtgärder i fredstid på krigsgrupperingsplatser, röjning mm.
- Direktiv för verksamhet när samtliga robotar är förbrukade.
- Insatsåtgärder vid störning av STRL 60 och Robot 68-systemet.
- Bestämmelser för utnyttjande av skenmål och skenanläggningar.
- Omgrupperingsfrekvens mellan krigsgrupperingsplatser, hänsyn ska tas till platsens utseende och belägenhet.
- Omladdningsberedskap.
- Beredskapsgrader vid kupp, mobilisering och krig.
- Ta fram direktiv och bestämmelser för meteorolog.
- Utnyttjande av luftförsvarsorientering (lufor) och luftvärrnsorder under de olika stridsledningsprogrammen (K1-K6).
- Direktiv för fältarbeten och markförsvarsåtgärder.
- Direktiv för service, tillsyn, felsökning m.m. i krig. Utnyttjande av robotverkstad, flottiljverkstad m.m. Även direktiv för verkstädernas krigsplanering i samråd med robotingenjörer, samt vid behov omfördelning av reservdelar, utbytesenheter samt reparationsresurser och inte allra minst, fördelning av kvarvarande robotar. Här ingick också en plan för marschvägar både till utgångsgrupperingsplats och för omgruppering, även reservvägar skulle planeras, övriga transporter, ordervägar och samrådsvägar.
- Fördelning av mål till olika robotkompaniermed hänsyn till insatskapacitet och målets kurs, fart och höjd.
- Ansvar för personalersättning och ersättning av förlorade fordon. Övriga vapenslags fältverkstäder ska kunna utnyttjas.
- Biträder milostab vid krigsplanläggning.
- Operativ samverkan över sektorgränser vid insatsbeslut, överlämning till Lfc eller Rrgc i angränsade sektor.
- Förplägningstjänst, sjukvårdstjänst, fångtjänst och krigsgravstjänst.
- Detaljkännedom om krigsgrupperingsplatser, belägenhet, utformning, rangering och omladdningstider för resp. plats.
- Bestämmelser för maskering.
- Bestämmelser för robotkompaniernas utnyttjande av basbataljonens stödfunktioner i krig.
- Bestämmelser för utgångsgruppering för robotförbanden.
- Kontinuerlig uppföljning av förbandens läges- och beredskapsrapporter i fredstid.
- Ansvara för instruktioner till Crbled samt Rbled. Även handhavande instruktioner för robotpaneler i Lfc.
- Operativ och taktisk utbildning av robotstridsledare.
- Planera och genomföra övningar med störande mål.
- Vid behov föreslå modifiering av teknisk utrustning.
- Ansvara för att utbildad personal för ledning finns på Lfc vid övningar.
- Delta vid rekognosering av nya krigsgrupperingsplatser.
Man kan utifrån ovan listade arbetsuppgifter ganska snabbt dra slutsatsen att det inte var något latmansjobb att vara Crbled!
När en Rbled går på sitt pass hade han en del uppgifter att utföra.
- Meddela växeln att rbled-platserna är bemannade.
- Förbindelseprov med den/de robotgrupper som ska betjänas.
- Begär att få en egen personlig höjdmätare tilldelad om möjlighet finns.
- Ta reda på vilka radarstationer som är i drift.
- Kontakta meteorolog för att erhålla de aktuella grupperingsplatsernas vindriktning, vindhastighet och temperatur för höjderna 1 km och composite height altitude. Det sistnämnda värdet beräknas med värden från 9, 12 och 15 km:s höjd. Värden från 9 och 15 km tas med en gång, värdet från 12 km två gånger. Det adderade värdet divideras med 4 och slutresultatet blir värdet för composite height altitude. Dessa värden vidarebefordrar Rbled till robotstridsledaren som registrerar dessa värden i datamaskinen i rbgc.
- Kontrollera att sektorspärrenheten är i funktion på respektive brr. Om den inte är i funktion beordras robotstridsledaren vara ansvarig för att sändning inte sker i de zoner enheten skulle spärrat för sändning.
Under ett övningspass är det rbled som söker upp lämpliga mål i luftrummet. Om detta objekt inte är målföljt begärs målföljning genom en kontakt med måled.
Insats mot mål
Den fasta telefonen på varje krigsgrupperingsplats ingick i krigsnätet och måste kopplas upp i en närbelägen telefonstation med en omkopplare, denna mobiliseringsuppgift låg ofta på LS-förbanden eller i kustområden på marinen. När förbandet kom till sin krigsgrupperingsplats så anslöt man omgående telefonen i kopplingsdosan och sedan var man uppkopplad mot Lfc hela tiden fram till omgruppering.
I Lfc var det luftförsvarsledaren (Luftled) som tog beslut vilka mål som skulle bekämpas och vem som skulle få uppdraget, han kunde ge uppdraget till chefsjaktledare, chefsluftvärnsledare eller chefsrobotledaren (Crbled). Robot 67 tillhörde luftvärnet så Crbled var endast ansvarig för Robot 68. När Crbled fick uppdraget begav han sig skyndsamt till ”robotledarhytten” där det fanns plats för 2 st robotledare (Rbled). Crbled stämde av med robotledarna vilka förband som fanns tillgängliga för insats. Rbled hade aktuell status för samtliga anslutna förband. Crbled tar med detta som underlag beslut vilket förband som ska göra insatsen. Rbled avgör hur många robotar som skulle användas, man kunde skjuta upp till 4 stycken i taget, men med tanke på det begränsade antalet robotar så lär det aldrig blivit aktuellt med flera stycken mot samma mål.
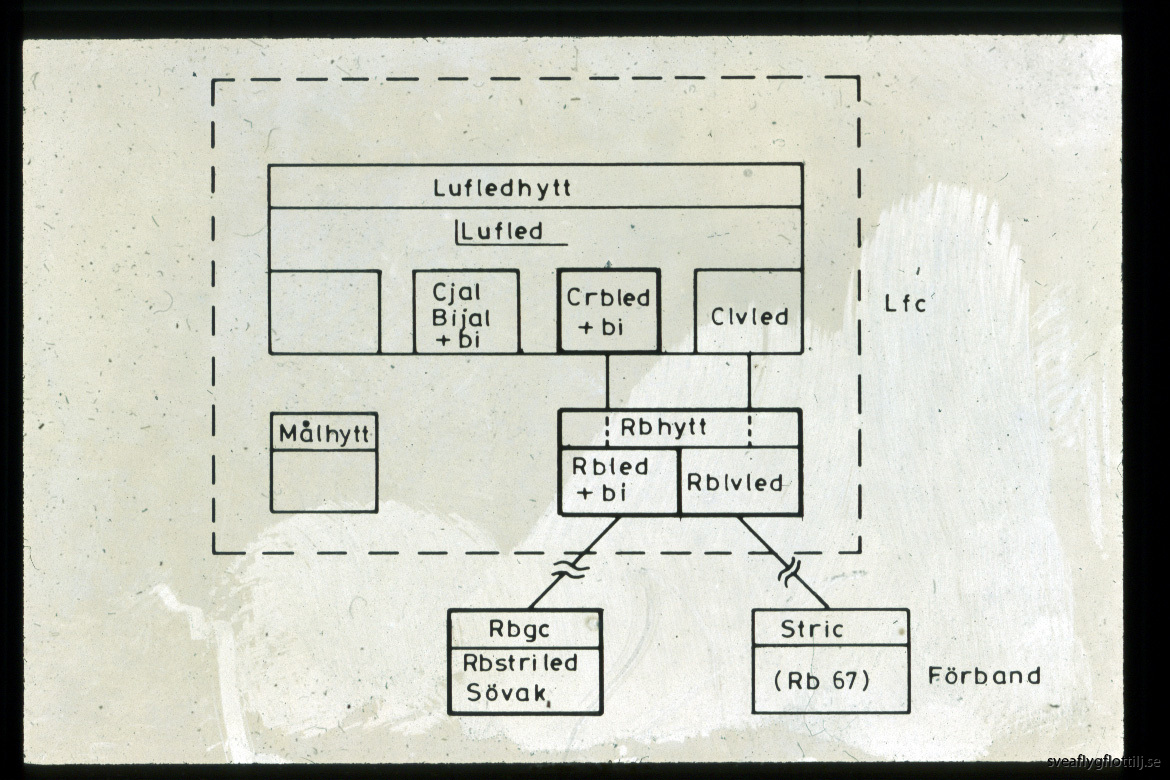
Ovan: översikt luftledarhytt på LFC Typ 1.
Källa: FMV
Till höger: de två vänstra stativen tillhörde robotledaren för rRobot 68.
Den högra var för arméns robotledare för Robot 67.
Källa: FMV.
Nedan: bild från robotledarhytten i Lfc.
Till vänster sitter robotledare för Robot 68 och till höger robotledare för Robot 67.
Foto: Arboga Robotmuseum.
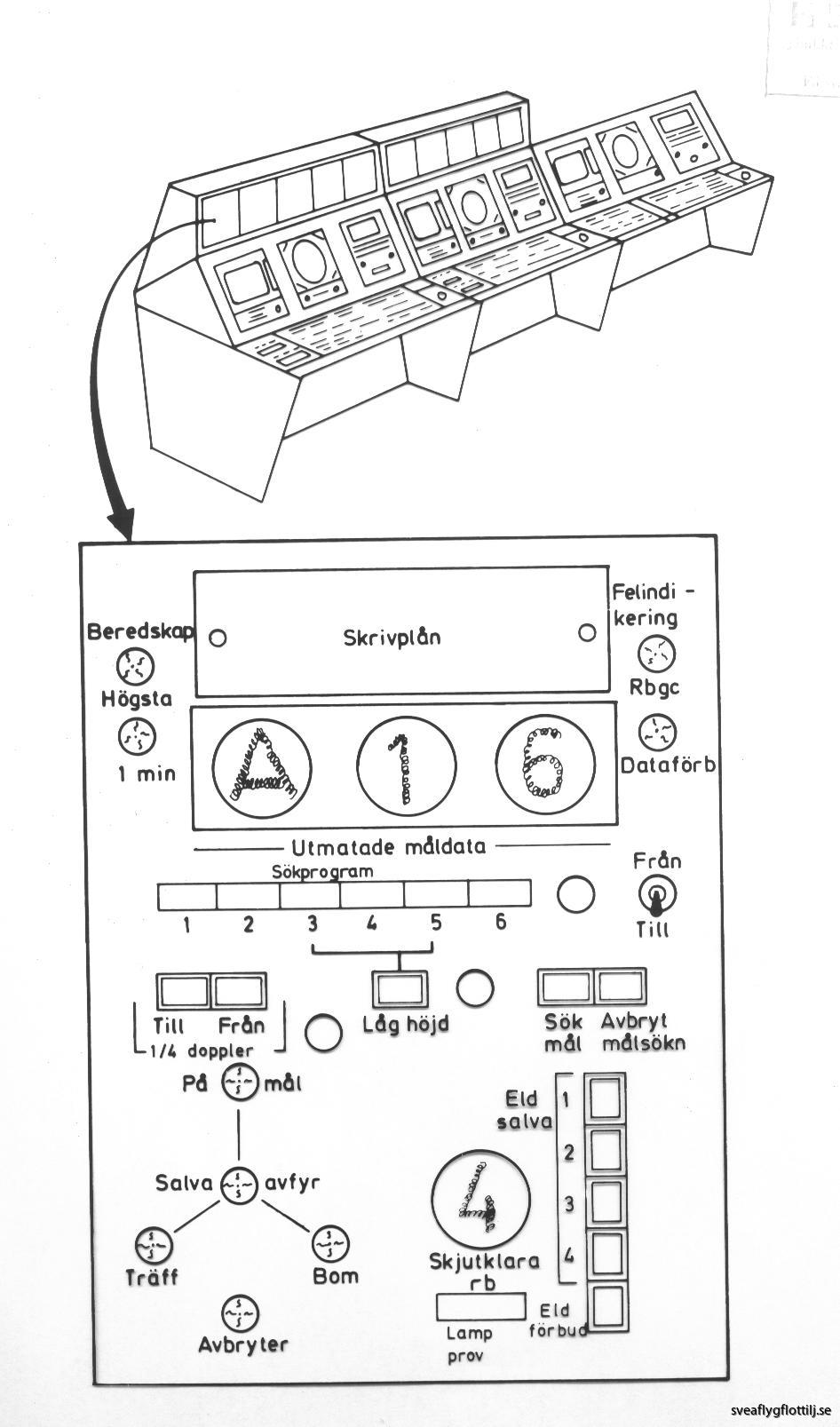

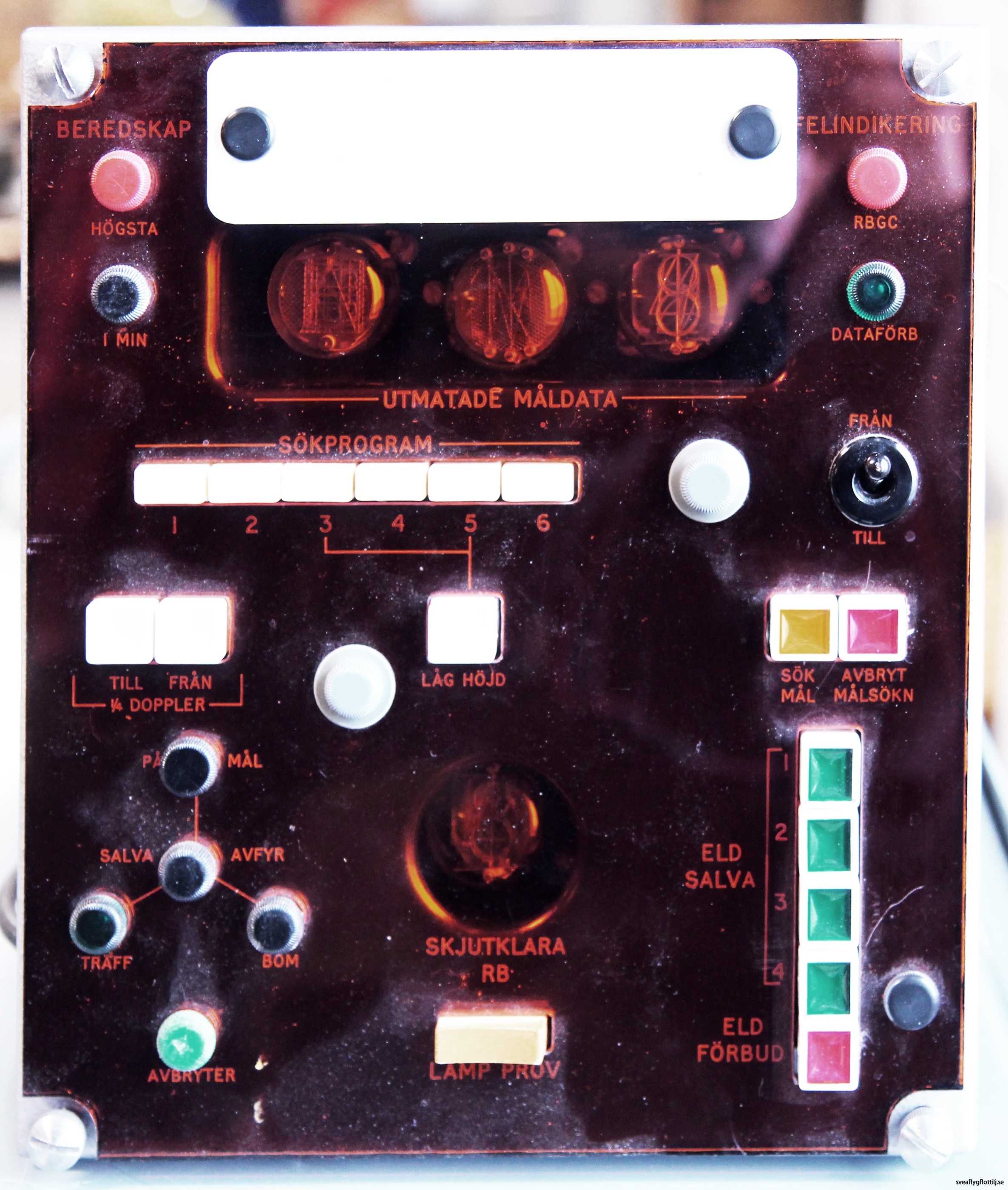
Robotledarens stridsledningspanel.
Foto: Håkan Wall.
För stridsledning fanns 4 arbetssätt;
K1-2-3 var det normala arbetssättet. Lfc erhåller information om aktuella mål från radarstationer m.m. Order och datainformation från Lfc sänds med telefon och radiolänk till förbandet.
K4 används om radiolänkförbindelsen är avbruten, då sänds alla order och datainformation med telefon,
K4 användes vid kontrollskjutningarna på RFN.
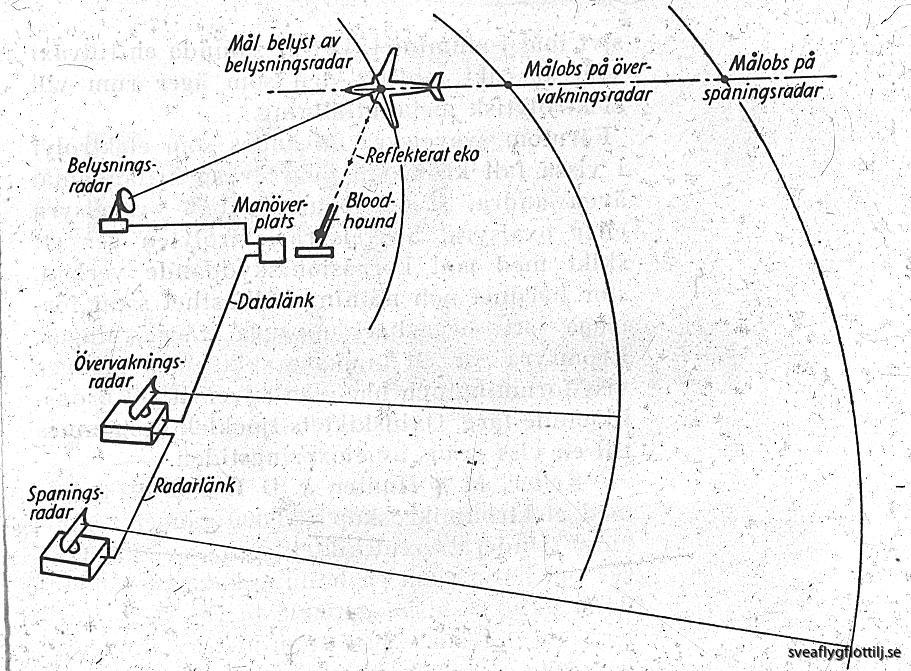
K5 används när Lfc inte erhåller information om aktuella mål via radarstationer utan får informationen från robotförbandets belysningsradar. Order och datainformation sänds från Lfc med radiolänk och telefon.
K6 används när inga order eller datainformation kommer från Lfc, robotförbandet kan då arbeta självständigt (autonomnt). I detta läge måste det säkerställas att eget flyg inte finns i luften.
Rbled gav nu order via telefon till robotstridsledaren att göra klart för insats, denne beordrar genast systemövervakaren i rbgc att påbörja en automatisk klargöring av aktuell robot, samtidigt sätts rbgc, brr och lavett i högsta beredskap, detta tar ca 45 sekunder.
Rbled kontollerar att ekot ligger i målföljningssymbolen, om målföljningen är undermålig kommer inte roboten att hitta målet, om korrigering behöver göras kontaktar Rbled målföljningsledaren (Måled) i Lfc och meddelar att en robotinsats ska ske mot ett visst angivet företag, Måled gör då behövlig korrigering.
Rbled sänder måldata via radiolänk till rbgc, måldatan innehåller avstånd, sidvinkel, höjdvinkel och hastighet. Datamaskinen i rbgc visar målets läge på en indikator, med en ring och en kursvektor. I hytten i Lfc ser Rbled en röd lampa som visar att förbandet inte är klart att skjuta.
Rbgc sänder måldatan till brr som riktar antennen mot den ungefärliga punkt där målet befinner sig och i Lfc tänds en gul lampa medan brr letar efter målet. För att radarn ska hitta målet krävs att vagnen står på TIR-punkten (Target Illumination Radar) och att positionen är inprogrammerad i datorn, att rätt TIR-punkt är inprogrammerad efter varje omgruppering är robotstridsledarens ansvar.
När radarn hittar ett mål och låser på detta sänder den måldatan till rbgc och till aktuell lavetts markreferensantenn, via lavetten överförs informationen till roboten för att roboten ska låsa på rätt mål efter startfasen. Samma måldata går också ut till berörd lavett från rbgc för att lavetten ska ställa in rätt sidvinkel i förhållande till målet. När målet befinner sig på sådant avstånd att beräknad träffpunkt ligger inom det område där förbandets robot når fram, brr följer målet, robot och lavett är klargjorda och inriktade, signalstyrkan är stark nog att låsa på målet när roboten går ur startfasen, då kan avfyring ske.
Robotstridsledaren har ansvar för att låsning skett på rätt mål och efter kontroll skickas en bekräftelse till Lfc där en grön lampa tänds. När den gröna lampan tänds ger Rbled eldstillstånd med orden ”en robot eld” och då trycker robotstridsledaren på ”FIRE-knappen”.

”FIRE”-knappen i rbgc.
Foto: Håkan Wall.