Lavett
Författat av Håkan Wall.
Startlavett, typ 202, tillverkad av Bristol Aircraft Ltd.
Lavetten har till uppgift att bära upp roboten, att förse roboten med el och hydraulkraft, att luftkonditionera roboten före skott, att rikta in roboten i sidled och att ge roboten en fast utskjutningsvinkel i höjdled vilket alltid är 34 grader.

Att hitta en tom lavett är inte det enklaste, men när minnesroboten på F13 flyttades till Arboga robotmuseum togs denna bild.
Foto: Arboga robotmuseum.

Tre lavetter i England. Notera att dessa inte är utrustade med fotsteg.
Foto Pete Harris, BMPG, England.

Lavett i Schweiz, spröten för att hålla fåglarna borta har vi endast sett på Schweiziska lavetter.
Foto via Arboga robotmuseum.
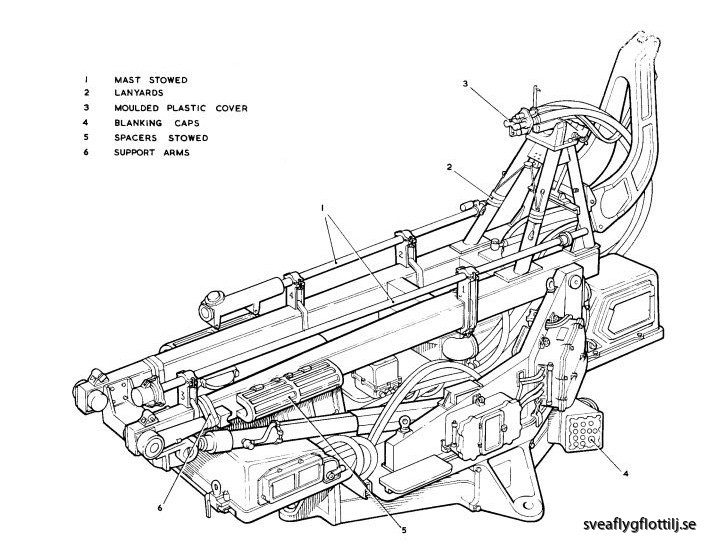
Innan lavetten lyftes upp på robotlastbilens flak för transport fanns en checklista på åtgärder som måste utföras för att lavetten inte skulle ta skada under lyft och transport, bl.a. monterades markreferensantennen ner och fästes på utliggaren. Lavetten är försedd med fyra stycken lyftöglor. Lavetten består av ett fundament och en roterbar överdel.
Transportsäkrad lavett.
Källa: FMV.
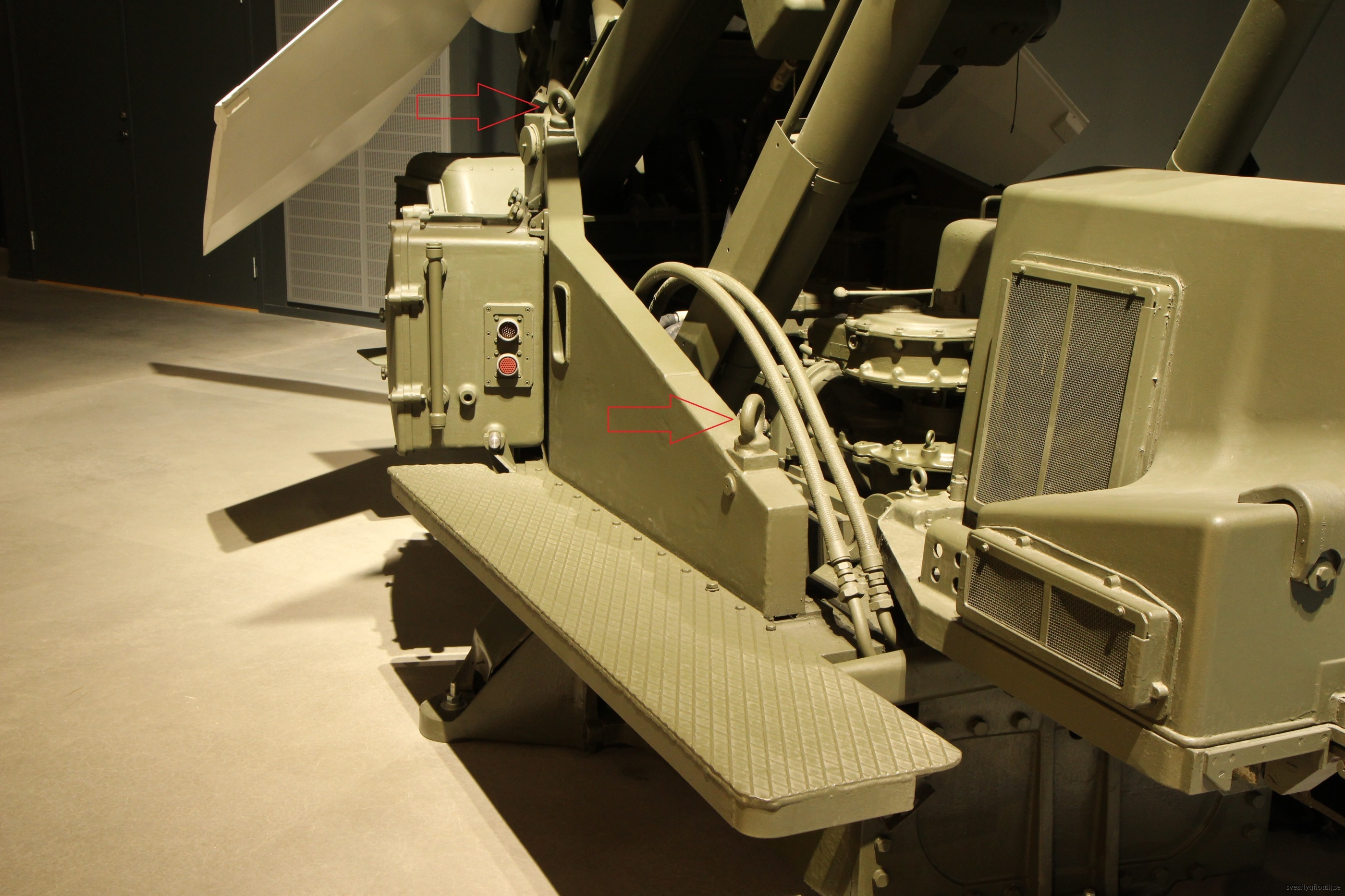
Lyftögla höger sida.
Foto: Håkan Wall.
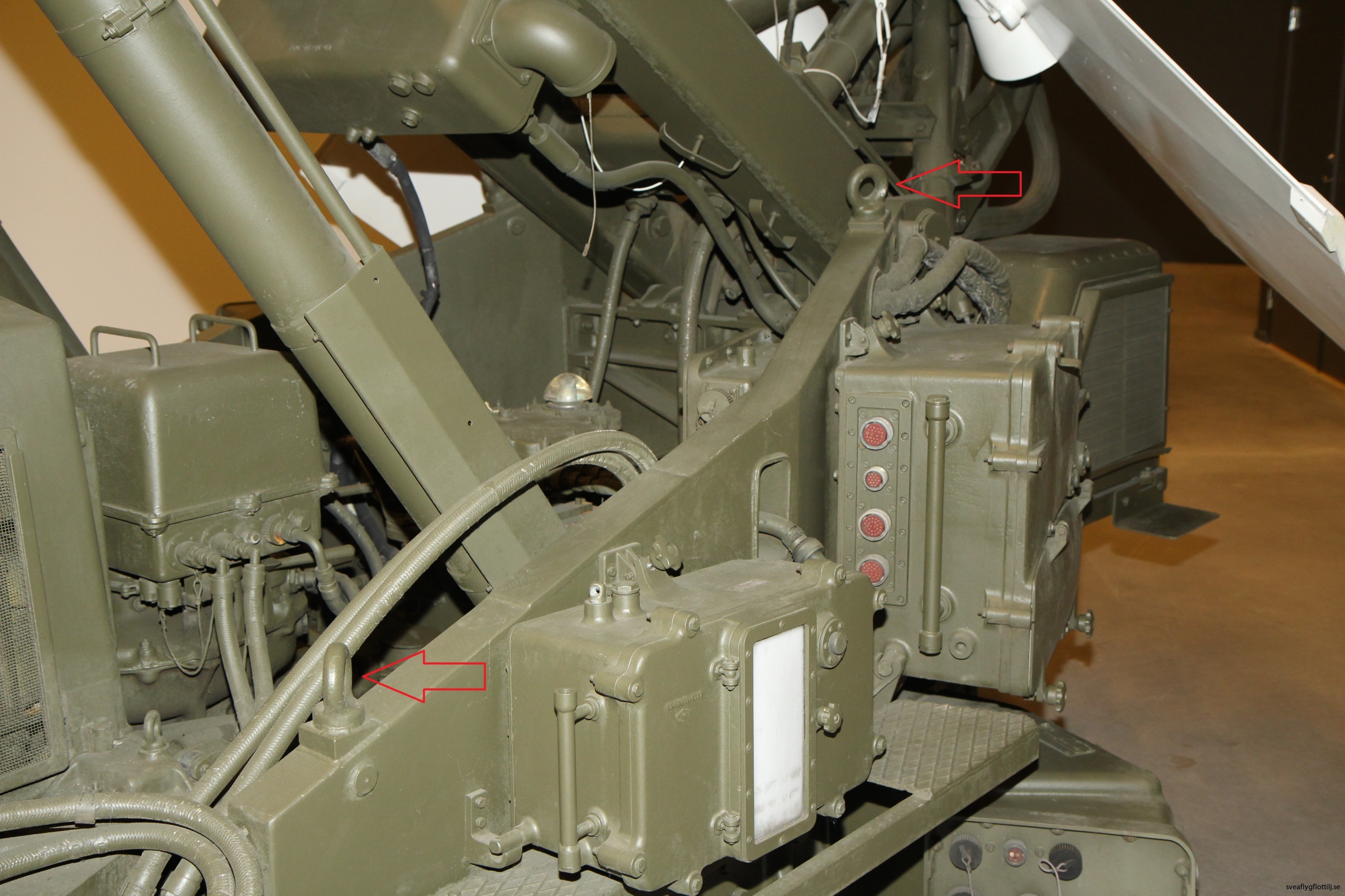
Ovan: Lyftögla vänster sida.
Foto: Håkan Wall.
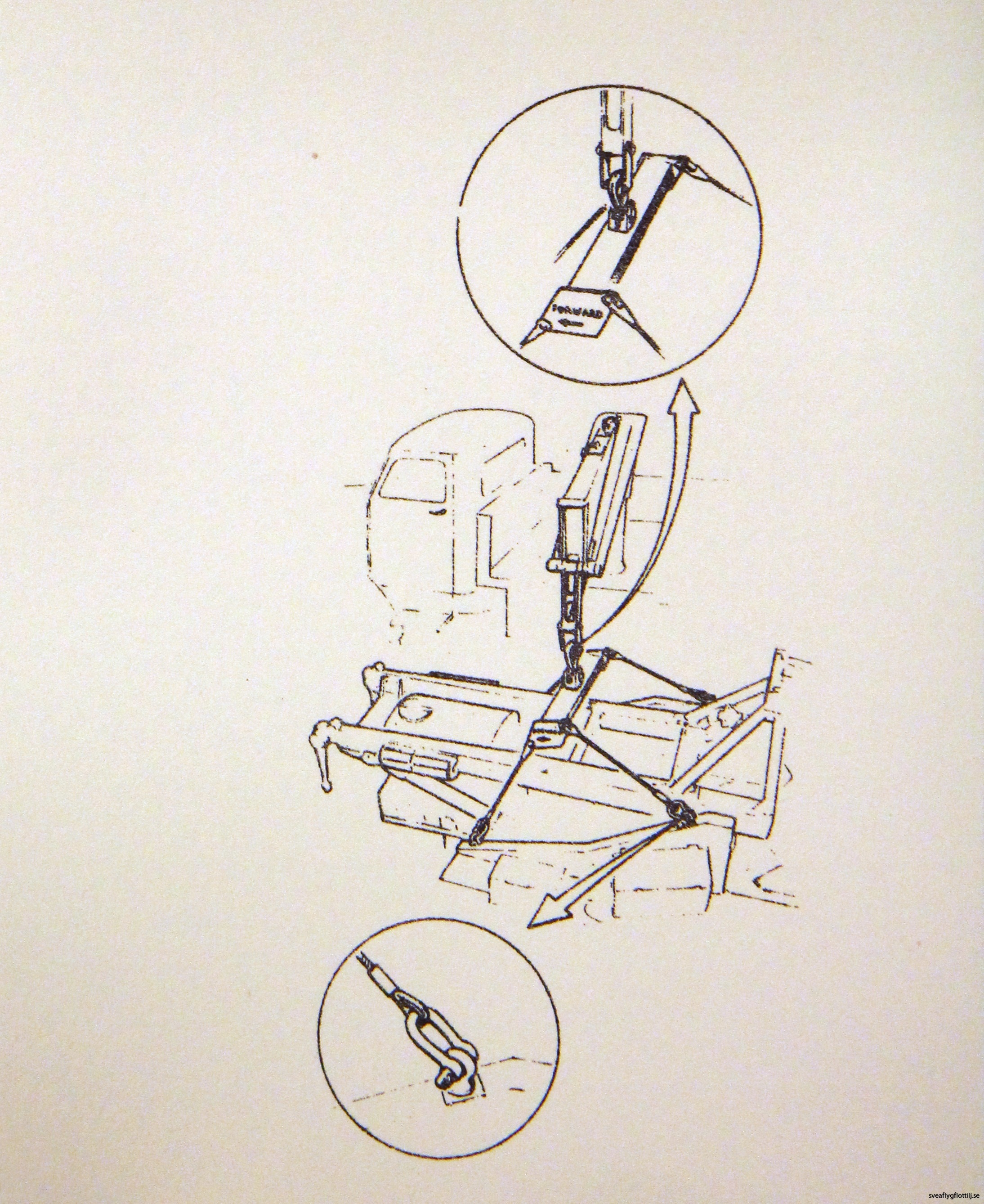
Till höger: Lavetten lyftes med ett speciellt lyftok.
Källa: FMV.
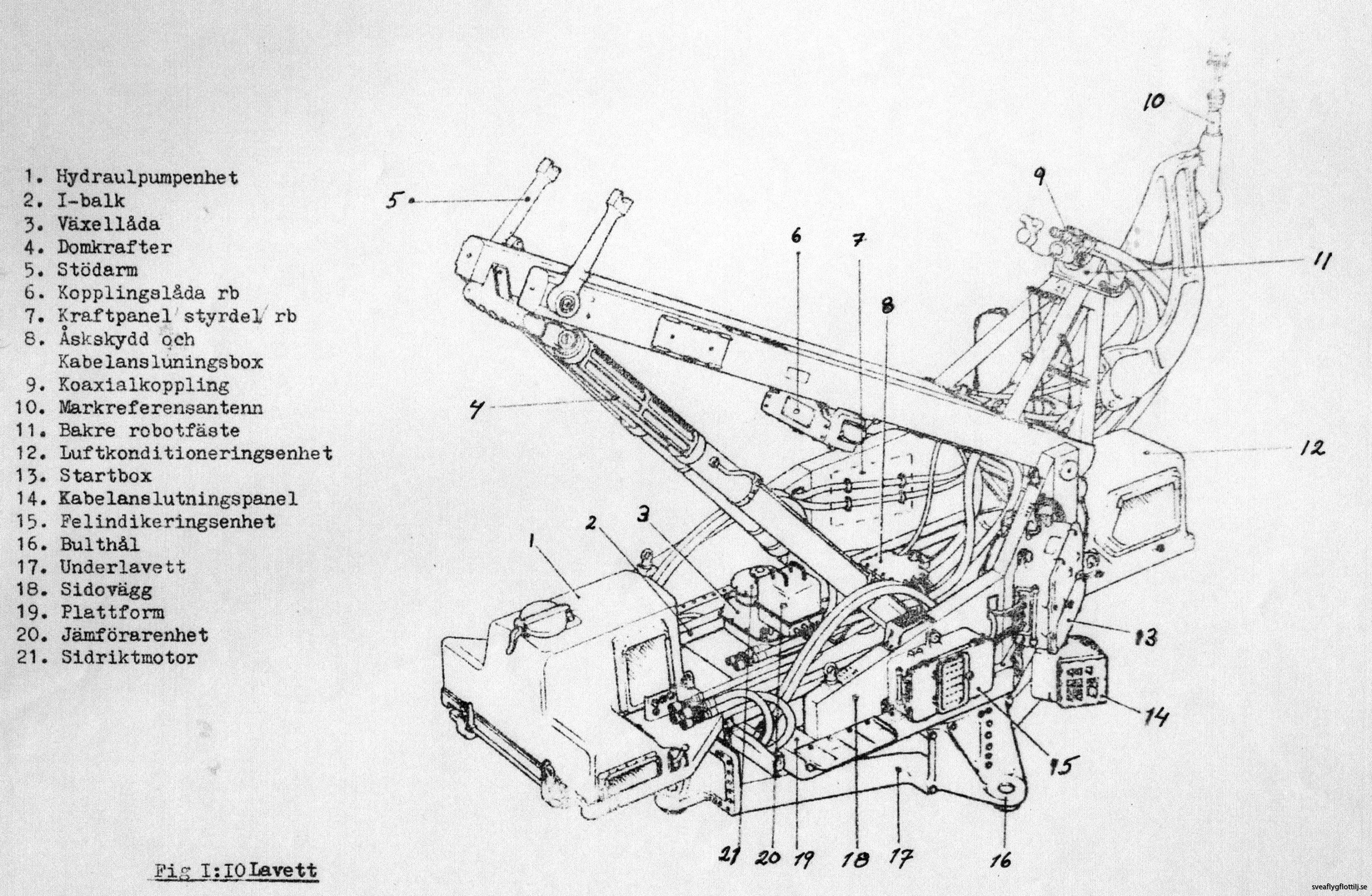
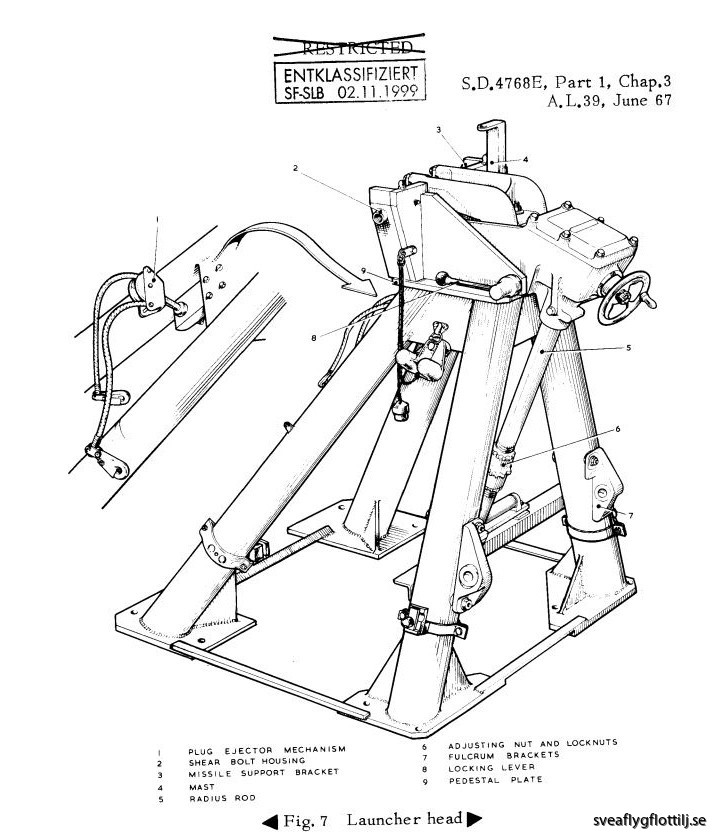
Sprängskiss över lavetten.
Källa: FMV.
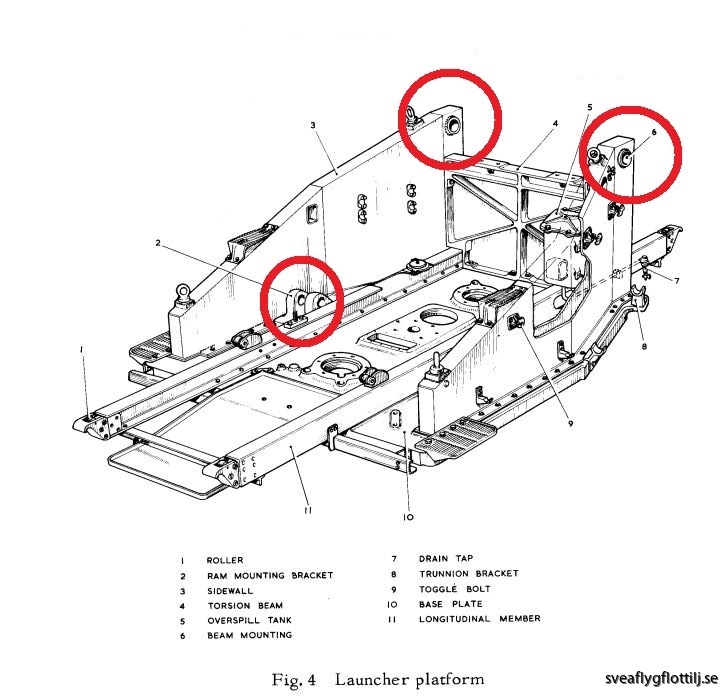
Fundamentet skruvas fast i betongplattan med fyra fastsättningsskruvar som gängas in i fundamentsbultarna som är ingjutna i betongen. Det finns även justermuttrar att använda om lavetten inte står i våg. Fastsättningsskruven är 16 cm lång varav gängdelen 12,1 cm. Diameter på gängdelen är 5,1 cm och skruven väger 3.660 gram.
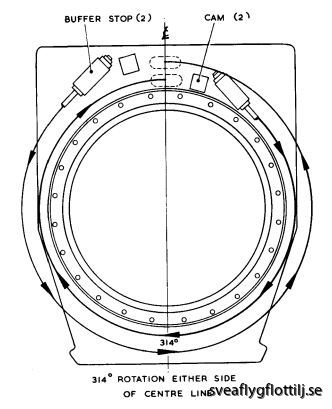
Lavettens fästkonsoller är utformade för att även fästa på s.k. markplåt. Fundamentet är utrustat med ett sidriktningsstopp som begränsar lavettens sidriktning till +/- 314 grader från huvudriktningen, dessa används dock endast vid manuell vridning av lavetten vid laddning och kontroller.
Totalt kan lavetten svänga 628 grader från ändläge till ändläge. Sidriktningen är begränsad för att undvika skador på kablage. Lavetten sidriktas normalt sett alltid från robotgruppcentralen så att roboten får önskad riktning vid avfyring. Manöversignalen matas till lavettens sidriktsystem som är placerat centralt på överdelen. Sidriktningen begränsas med hydrauliska buffertbromsar till +/- 300 grader. Maximal sidriktningshastighet är 36 grader per sekund.
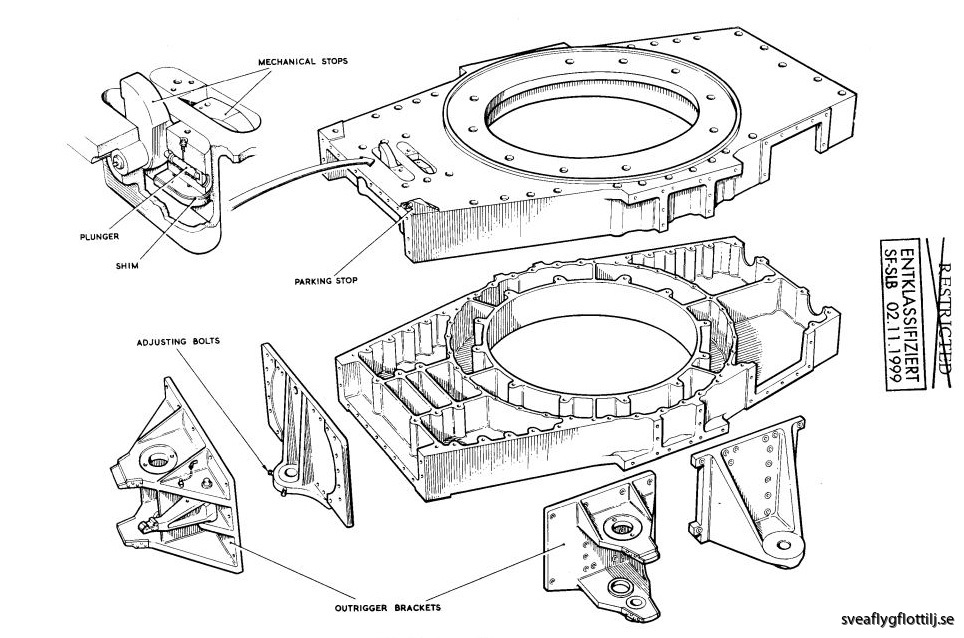
Fundamentets olika delar. Även Justermuttrar (adjusting bolts) är inritade. Dessa användes för att lavetten ska stå i våg.

Justermuttrar markerade. Observera att fastsättningsbultarna ej är original på denna lavett.
Foto: Håkan Wall.
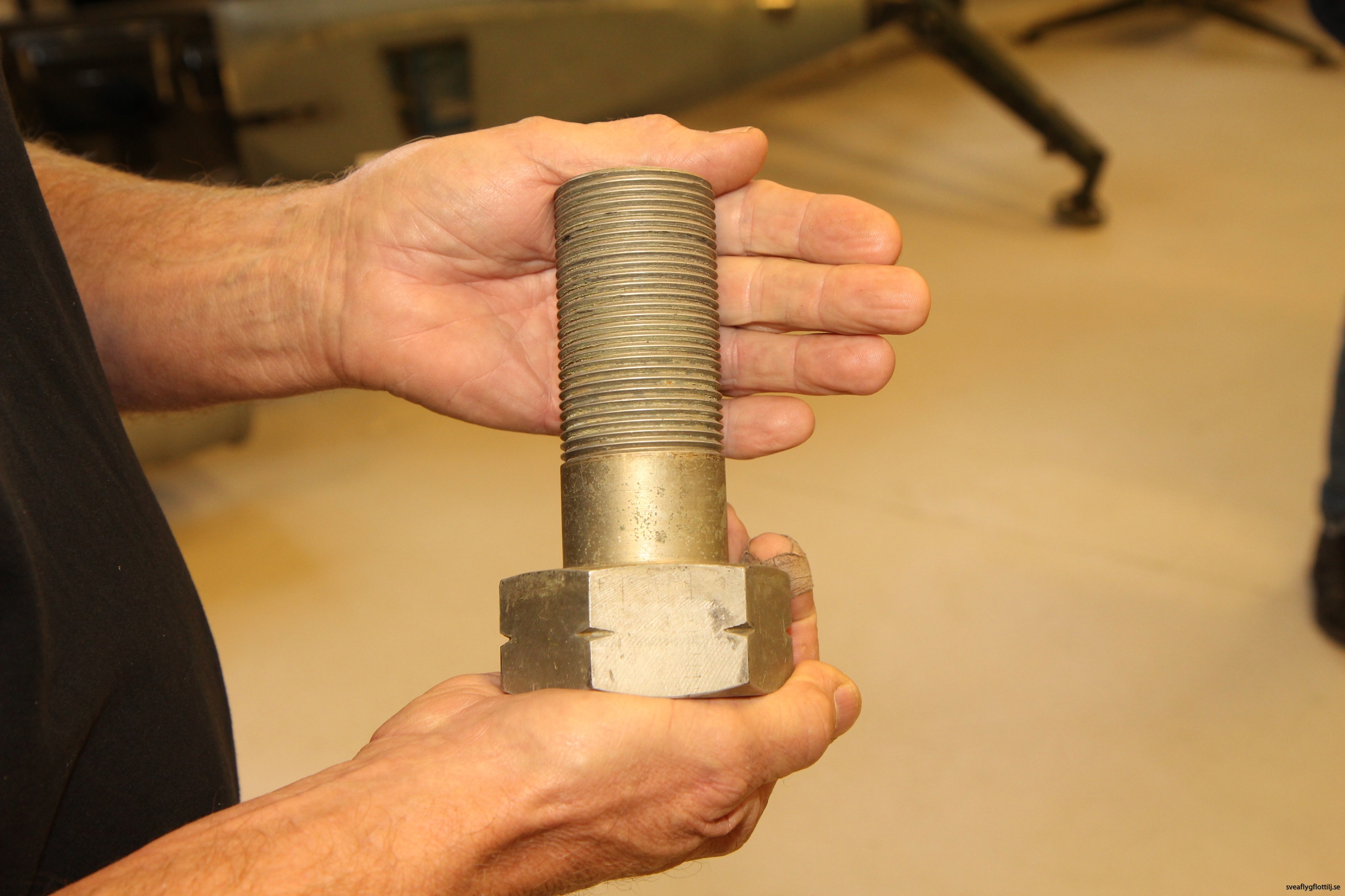
Ovan samt nedan till vänster: Fastsättningsskruv.
Foto: Håkan Wall (O), Arboga robotmuseum (NTV).

De hydrauliska buffertbromsarna.
Källa: FMV.
Sidriktlagret, på vilken den roterbara överdelen är monterad, består av tre huvuddelar: innerring samt övre och undre ytterring. Innerringen har frästa kuggar på insidan genom vilka sidriktväxeln överför sin kraft.
Konstruktionen innehåller 2 kullager, ett mellan övre ytterring och innerring och ett mellan innerring och nedre ytterring.
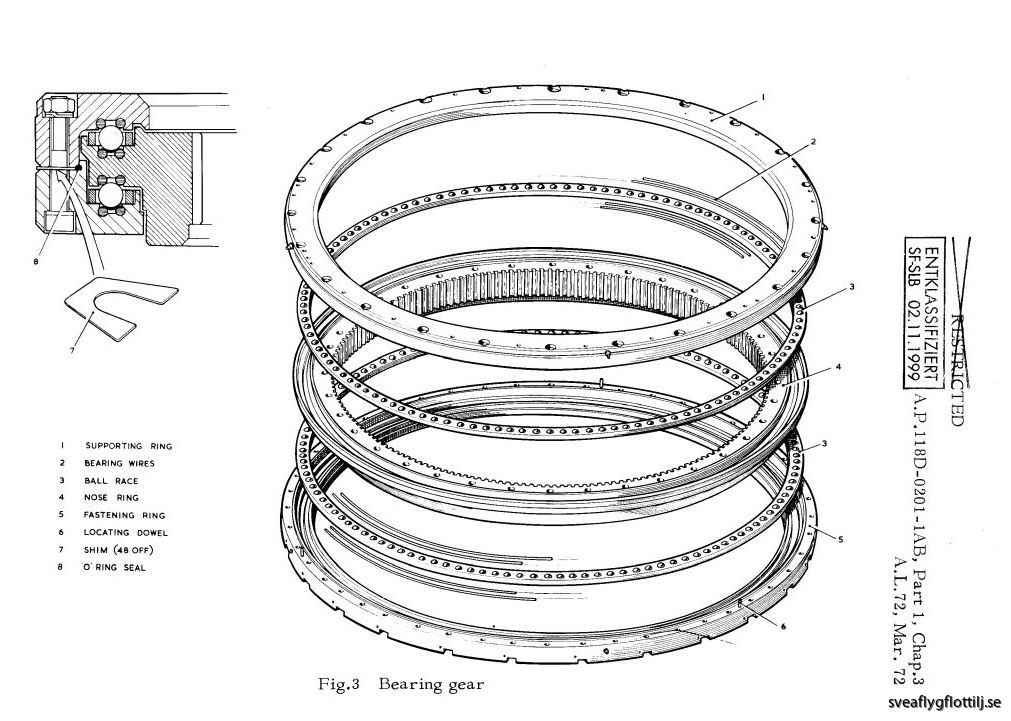
Sidriktlagret.
Källa: BMPG.
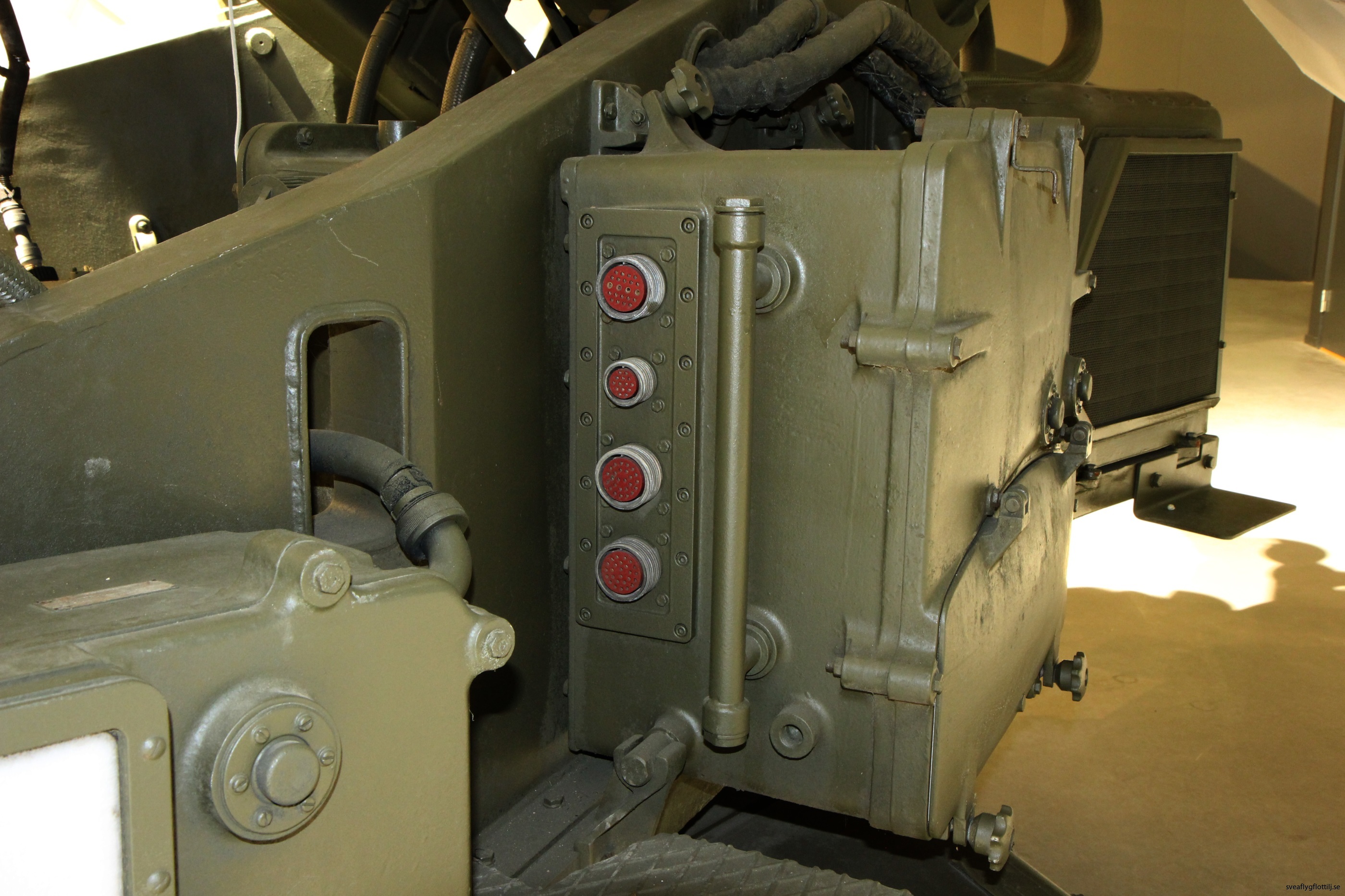
De kablar som ska anslutas till lavetten kommer upp ur kabelgraven under lavetten och kopplas in i kabelanslutningsenheten. Det är en elkabel för att strömförsörja lavetten och en för strömförsörjning till telefonutrustningen, tolv datakablar från robotgruppcentralen samt en kabel till ett 240V enfasuttag.
Från kabelanslutningsenhetens baksida leds de kablar som avser roboten via en kabelspiral till kopplingsboxen på lavettens överdel. Spiralen fungerar som en kabelvinda och den drar in respektive släpper ut kabel när överdelen svänger.
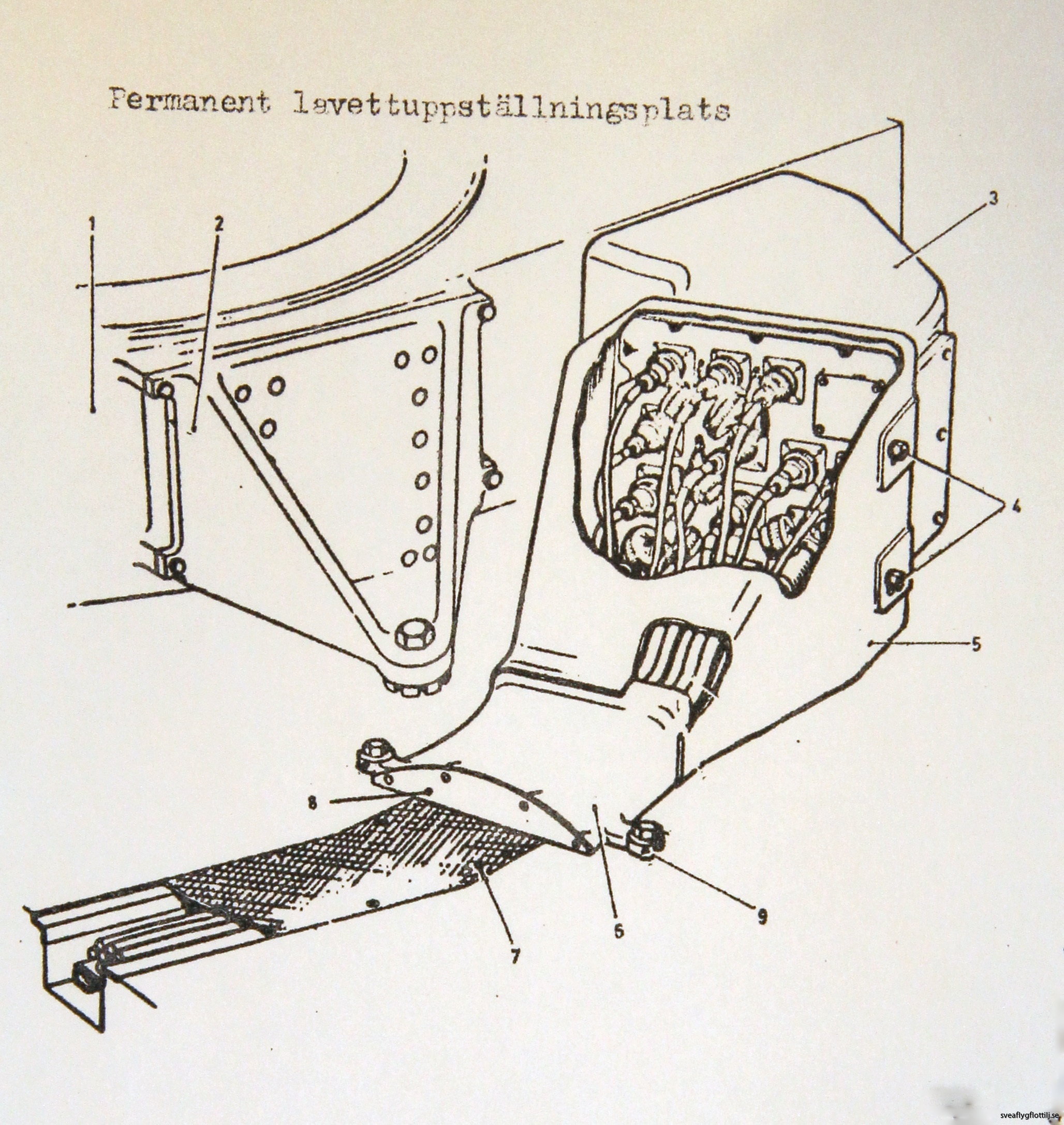
Kablarna som kommer upp ur kabelgraven skyddas med en asbeststrumpa och ansluts till lavettens kabelanslutningsenhet.
Källa. FMV.
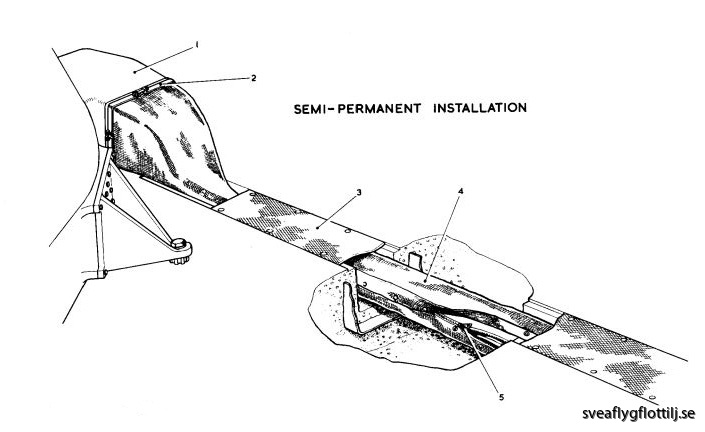
Kablarna som kommer upp ur kabelgraven skyddas med en asbeststrumpa och ansluts till lavettens kabelanslutningsenhet.
Källa: BMPG.
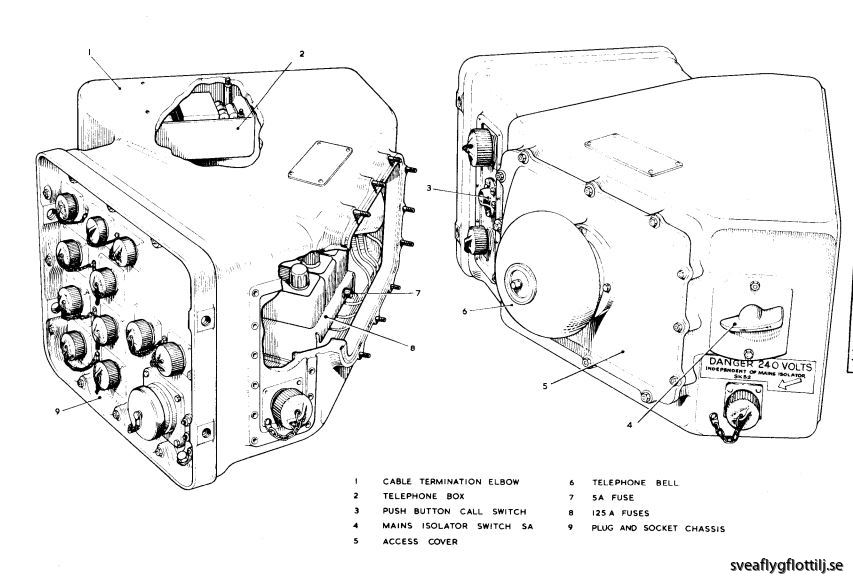
Kabelanslutningsenhet-
Källa: BMPG.

Kabelanslutningsenhet.
Foto: Håkan Wall.
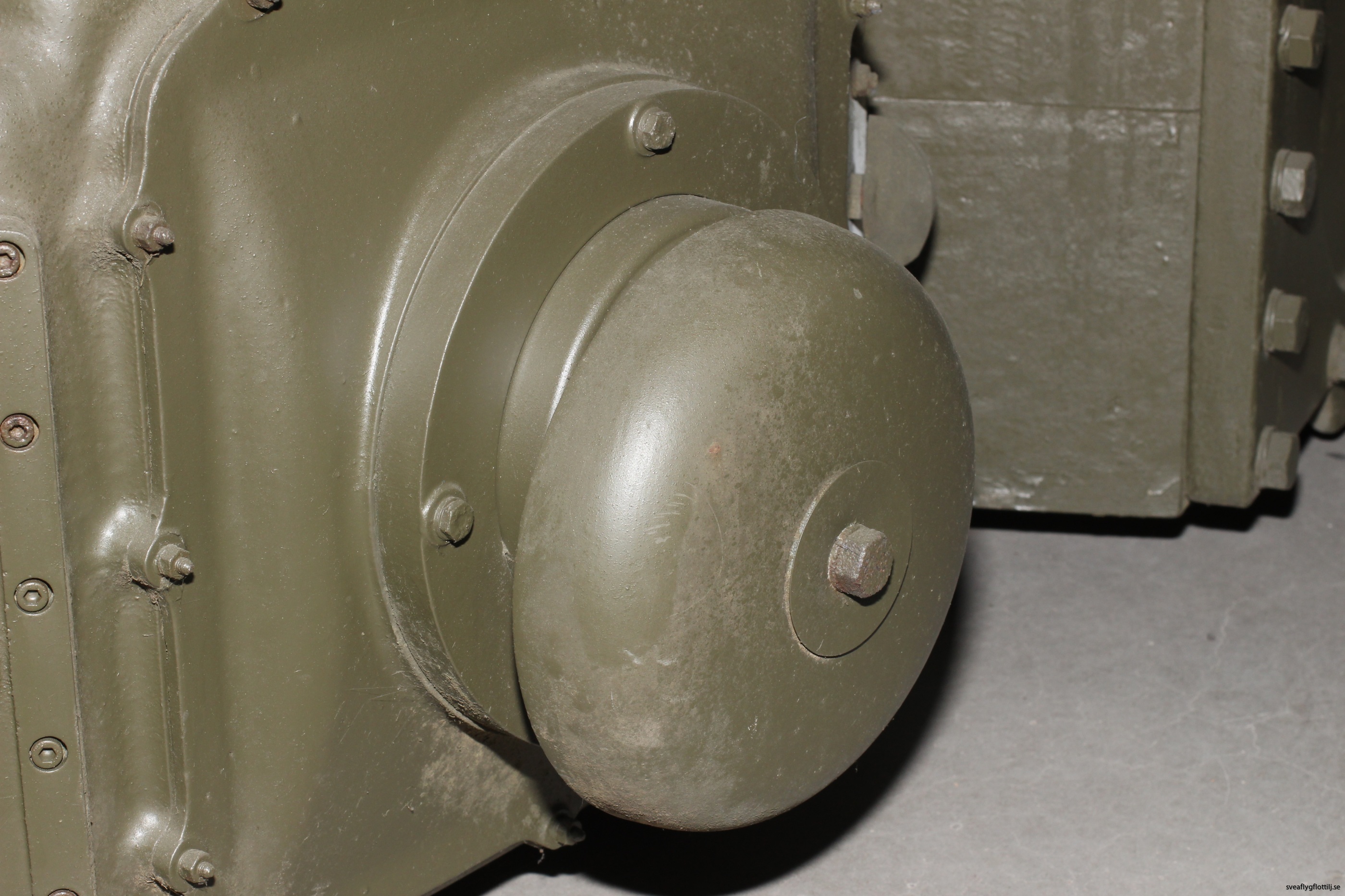
Kabelanslutningsenhet, ringklocka för telefonen.
Foto: Håkan Wall.

Vred för isolator, kabelanslutningsenhet.
Foto: Håkan Wall.
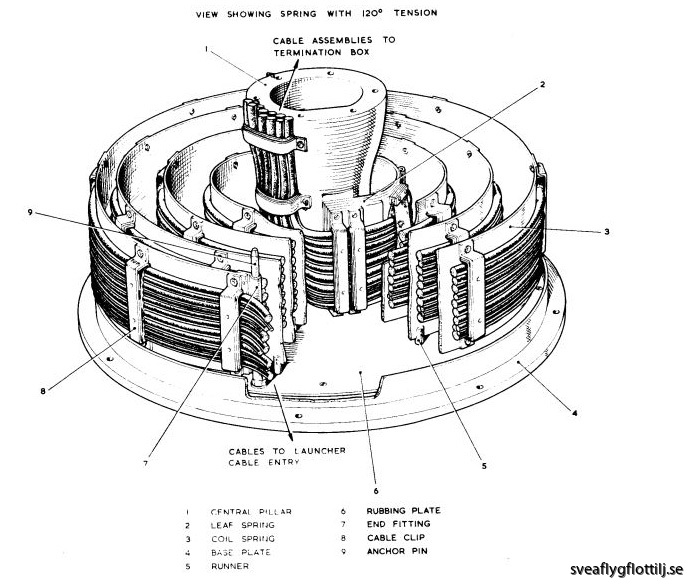
Kabelspiral.
Källa: BMPG.
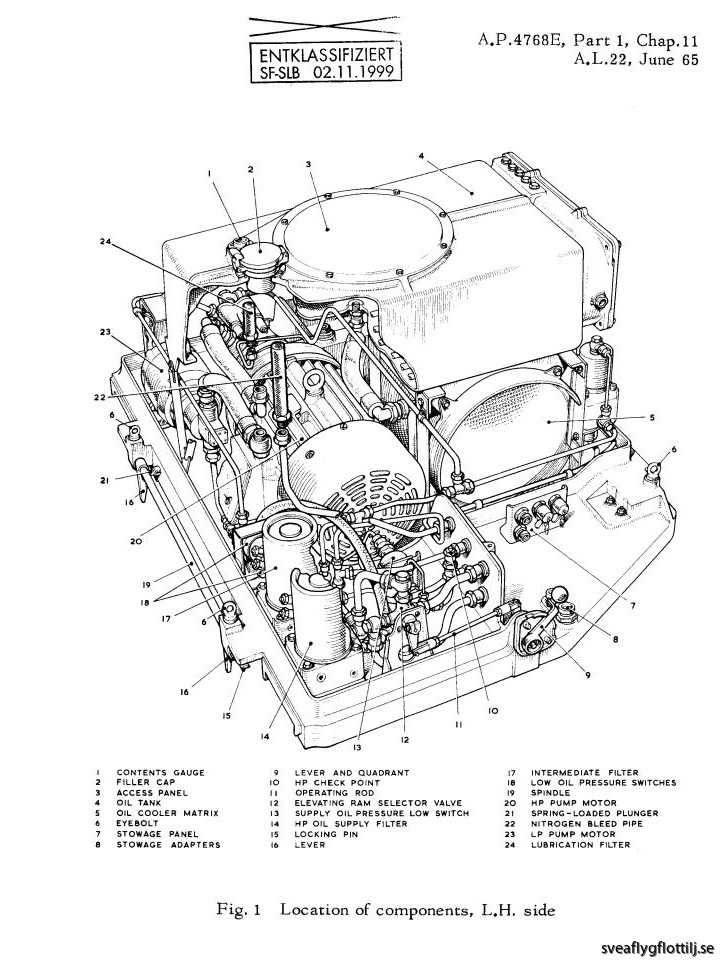
Lavettens överdel är uppbyggd på en gjuten lättmetallplatta med måtten 1,9 m x 1,53 m. På bottenplattan är två lättmetallskenor fastbultade, de sticker ut framför, respektive bakom bottenplattan. På de främre skenorna är hydraulpumpsaggregatet monterat och på de bakre luftkonditioneringsenheten. Hydraulaggregatet har två pumpar, en högtryckspump och en lågtryckspump. Högtryckspumpen som används vid hög beredskap levererar kraft till styrning av målsökarantennen medan roboten ligger på lavetten, till sidriktsystemet och buffertbromsar. Den styr även de två domkrafter som höjer och sänker lavettens eleverbara del. Lågtryckspumpens uppgift är att under lägre beredskap hålla uppe hydraultrycket i lavett och robot för att förhindra att luft kommer in i systemet.
När roboten ligger på lavetten måste temperaturen i framkroppen hållas inom +10° C till + 35° C för att elektroniken i målsökaren ska fungera tillfredställande. Detta åstadkoms med luftkonditioneringsenheten som levererar kylluft eller varmluft efter behov. Luften leds i ledningar mellan luftkonditioneringsenheten och framkroppen i ett slutet system. Under högsta beredskap pågår en ständig tillförsel av kylluft som har en temperatur på + 10,5° C eller + 19° C. Den högre temperaturen väljs vid låg yttertemperatur. Vid lägre beredskap startas luftkonditioneringen automatiskt vid behov för att reglera temperaturen inom spannet ovan.
Förutom temperaturer på 10,5° och 19° C kan även varmluft på 30° C tillföras. Enheten går i 30 minuter, har inte temperaturspannet uppnåtts under denna tid går enheten tills temperaturen ligger inom spannet. Kapaciteten på producerad luftmängd är 2,2 kg/minut varav 1,6 kg/minut till roboten.
Lavettens överdel.
Källa. BMPG
Hydraulpumpsaggregatet.
Foto: Håkan Wall.

Hydraulpumpsaggregatet.
Foto: Håkan Wall.
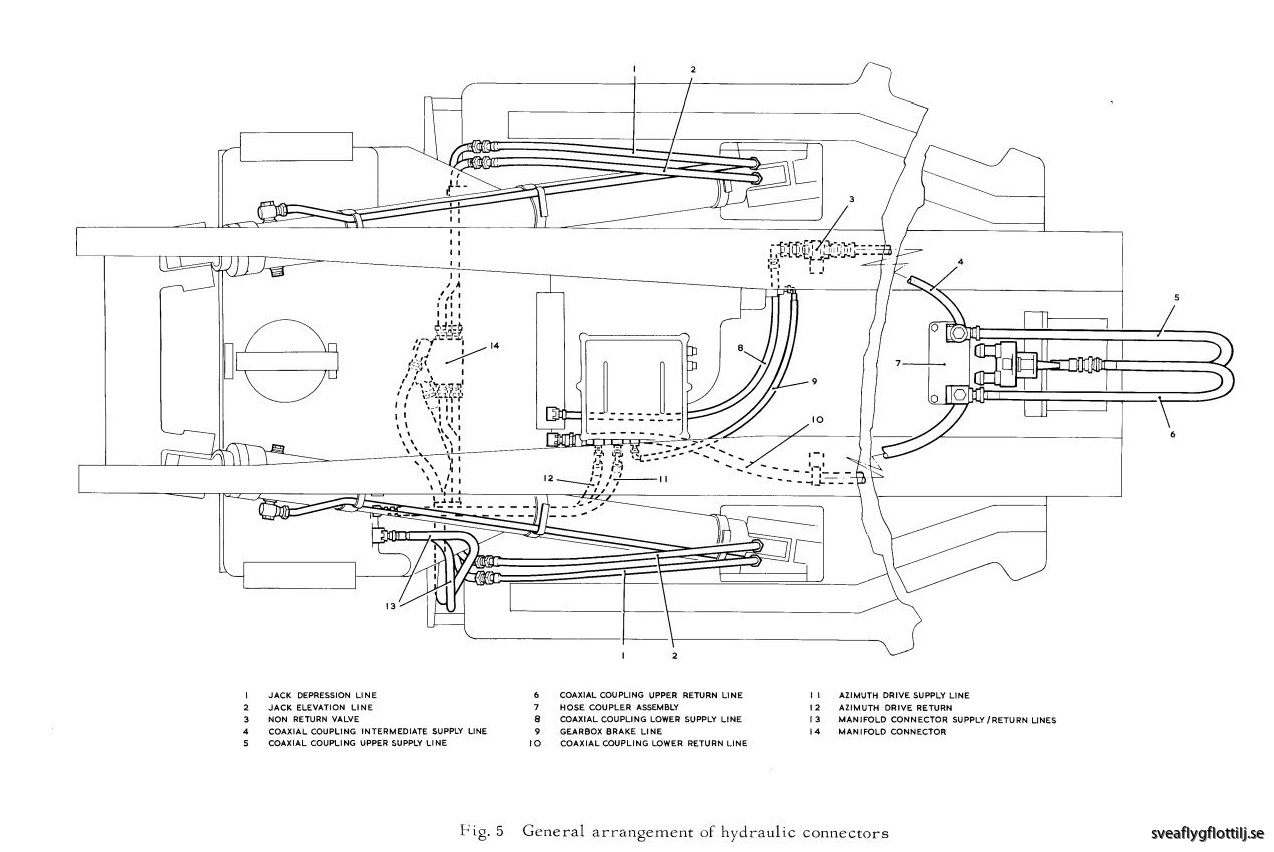
Lavettens hydraulledningar.
Källa: BMPG.

Hydraulpumpsaggregatet.
Foto: Håkan Wall.

Här fyllde man i mer olja vid behov.
Foto: Håkan Wall.

...och enligt mätaren finns det behov!
Foto: Håkan Wall.

Telubs serviceetikett sitter kvar på lockets insida. Foto: Håkan Wall:
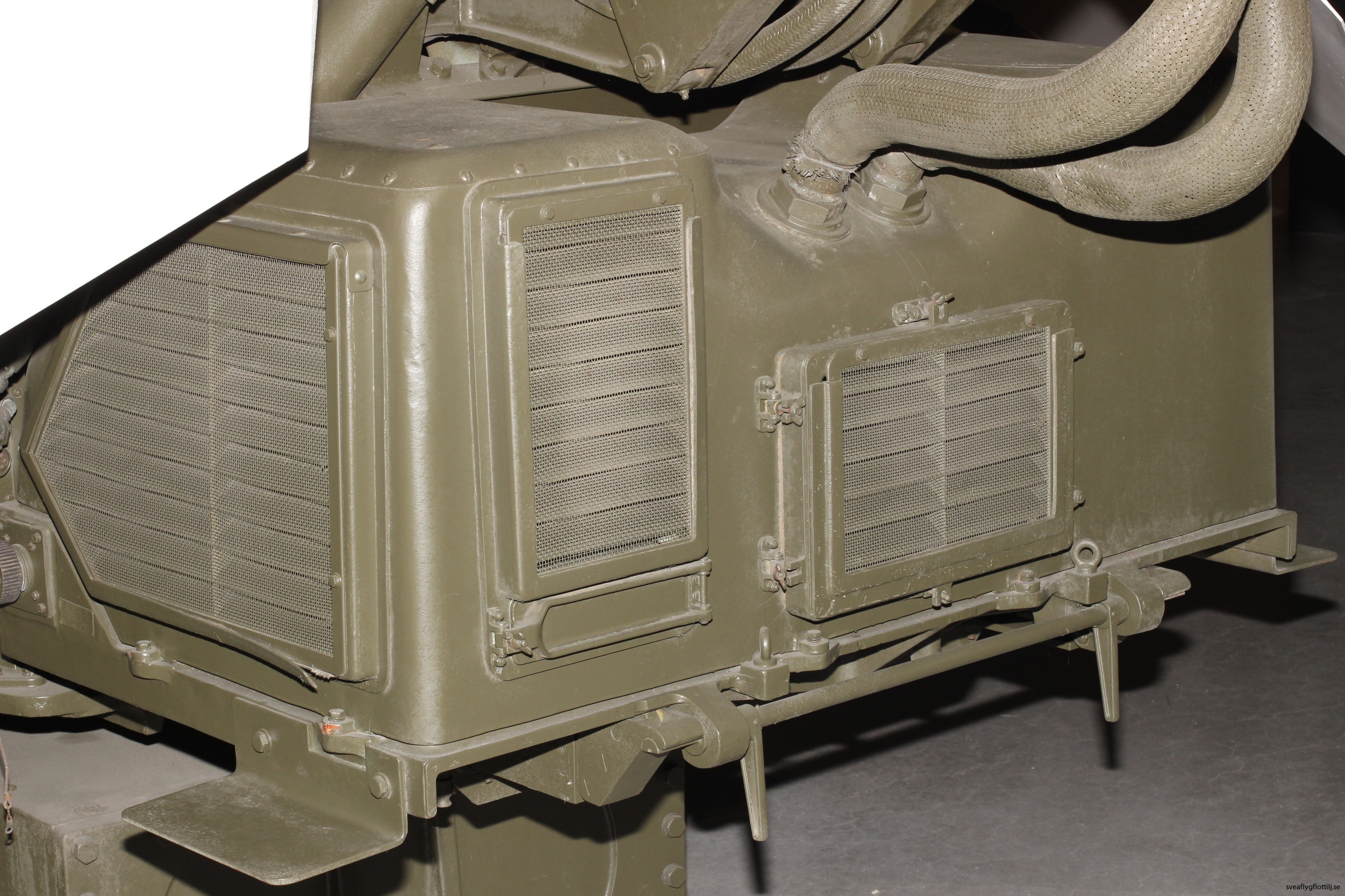
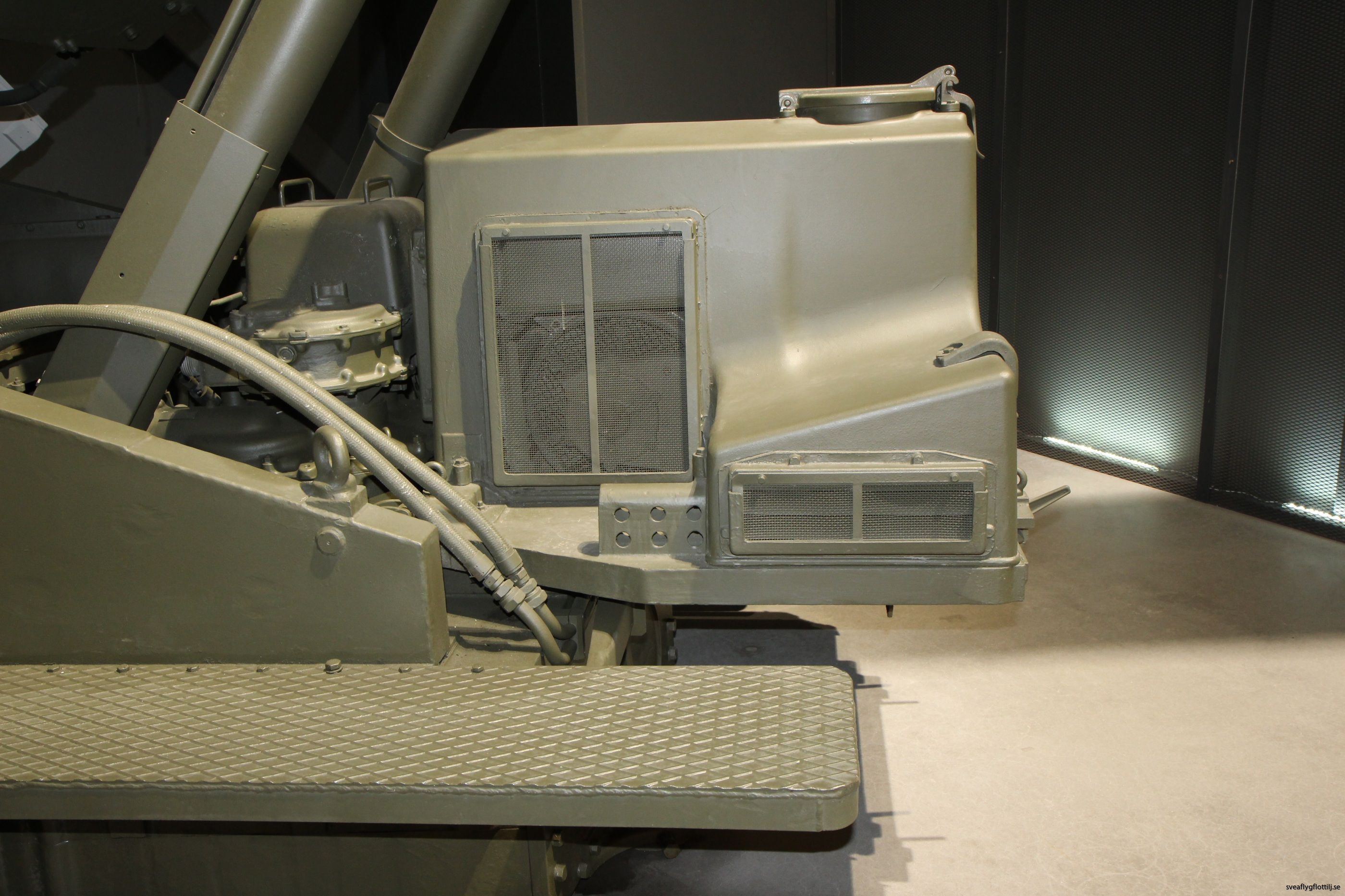
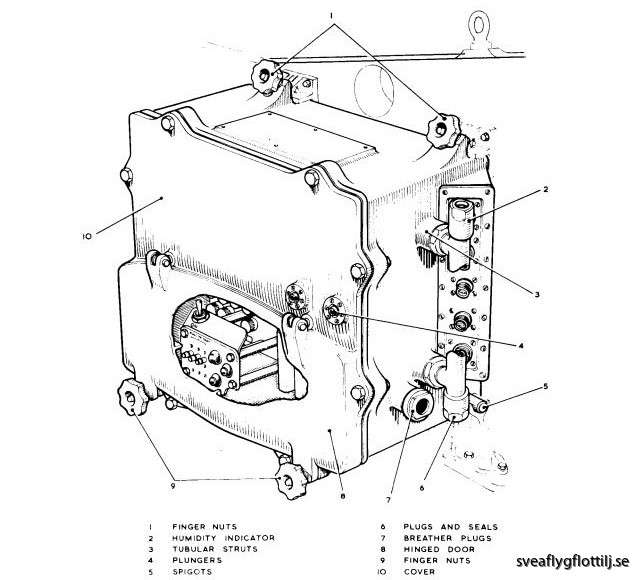
Luftkonditioneringsenhet.
Foto: Håkan Wall.
Luftkonditioneringsenhet.
Källa: BMPG.
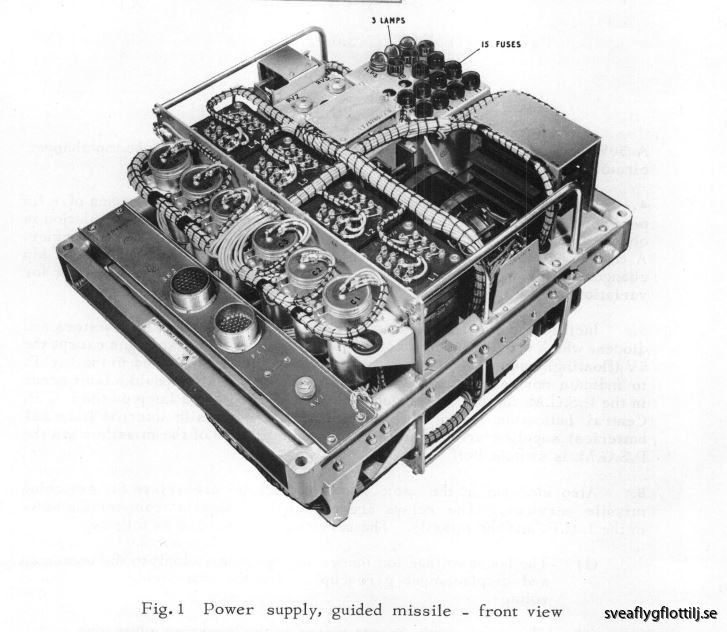
Två sidovägar i stål är fastbultade i bottenplattan. På utsidan av vänstra sidovägen sitter felindikeringsenheten samt lavettens startbox. Felindikatorn överför information om lavettens och robotens status, samt indikerar uppkomna funktionsfel och säkringsfel, till robotgruppcentralen.
Samma information visas också på lavettens felindikeringspanel som har 27 signallampor.
På insidan, mittemot startboxen, sitter motståndsenheten för rammotor- och termobatteritändkretsarna. Enhetens funktion är att säkerställa att strömkällan inte överbelastas vid en ev. kortslutning i tändarna. På bakkanten av vänstra sidoväggen sitter en mikroströmbrytare som ger signalen ”lavetten eleverad” till robotgruppcentralen. På högra sidoväggens utsida sitter kraftenheten för robotens styrdel.

Felindikeringsenhet.
Foto: Håkan Wall.

Felindikeringsenhet.
Foto: Håkan Wall.

Felindikeringsenhet.
Foto: Håkan Wall.
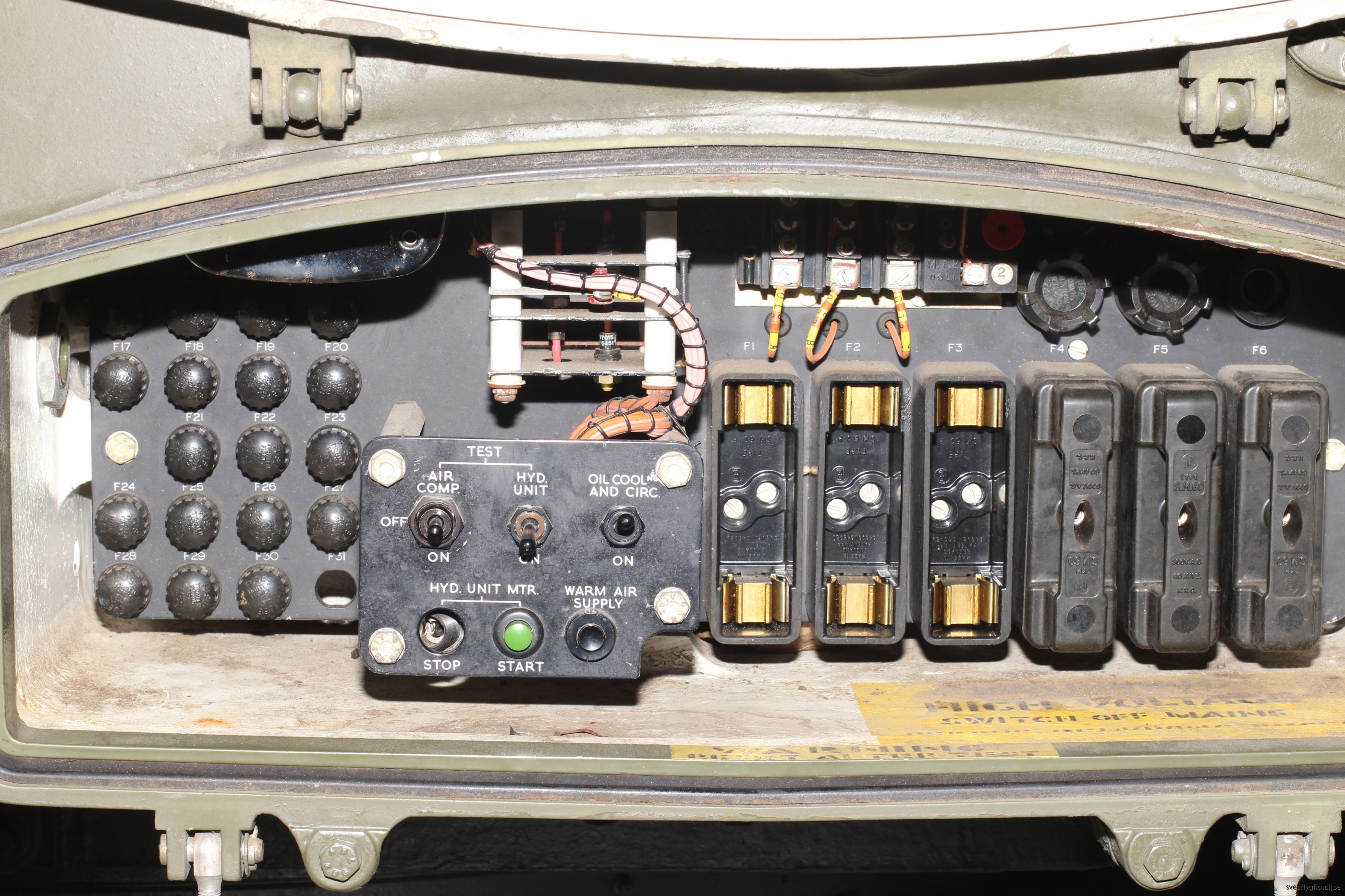
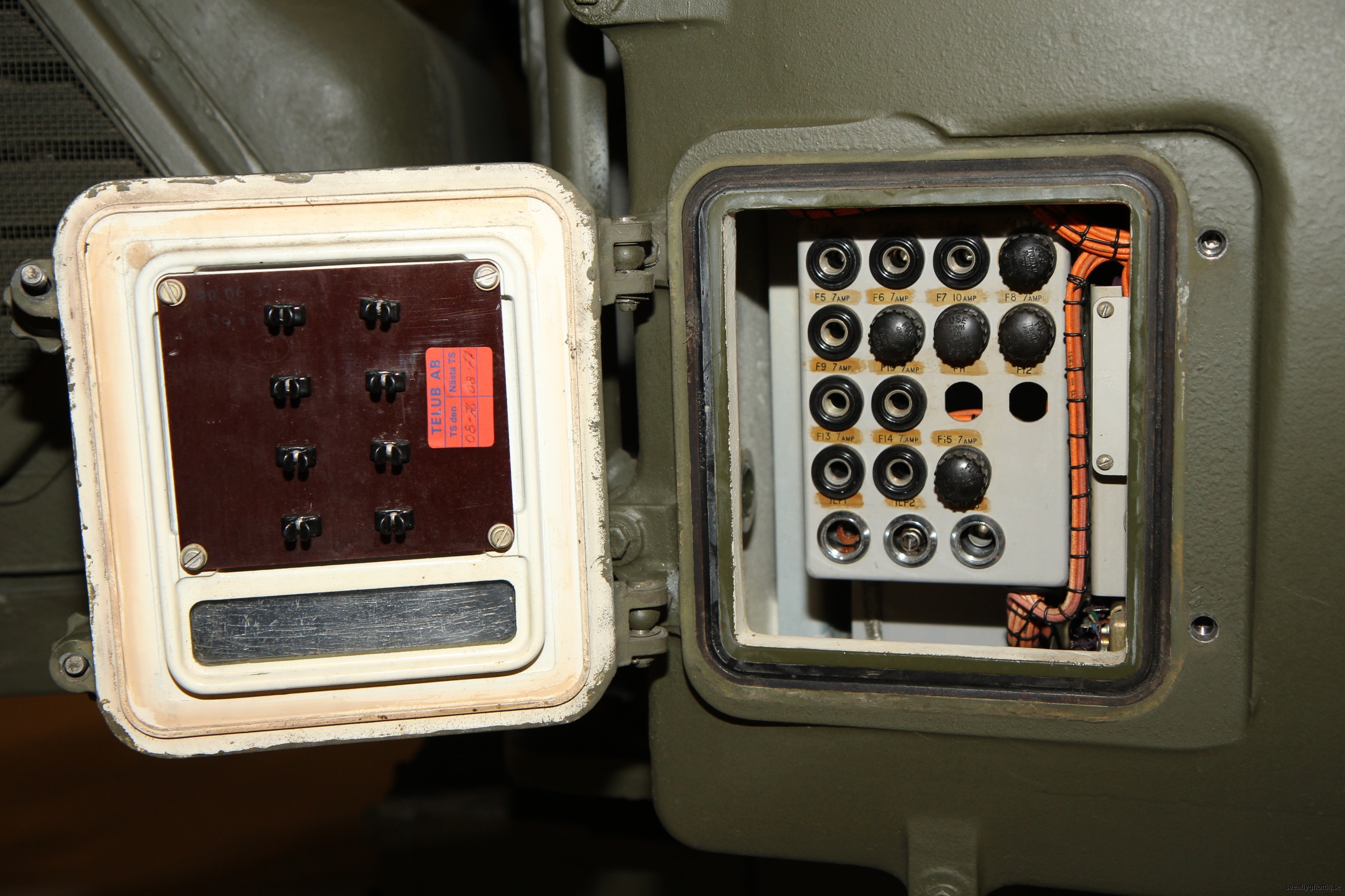
Lavettens startbox.
Foto: Håkan Wall.
Olika kabelkopplingar.
Foto: Håkan Wall.
Under luckan.
Foto: Håkan Wall.

Under luckan.
Foto: Håkan Wall.

Under luckan.
Foto: Håkan Wall.
Under luckan.
Foto: Håkan Wall.

Under luckan.
Foto: Håkan Wall.

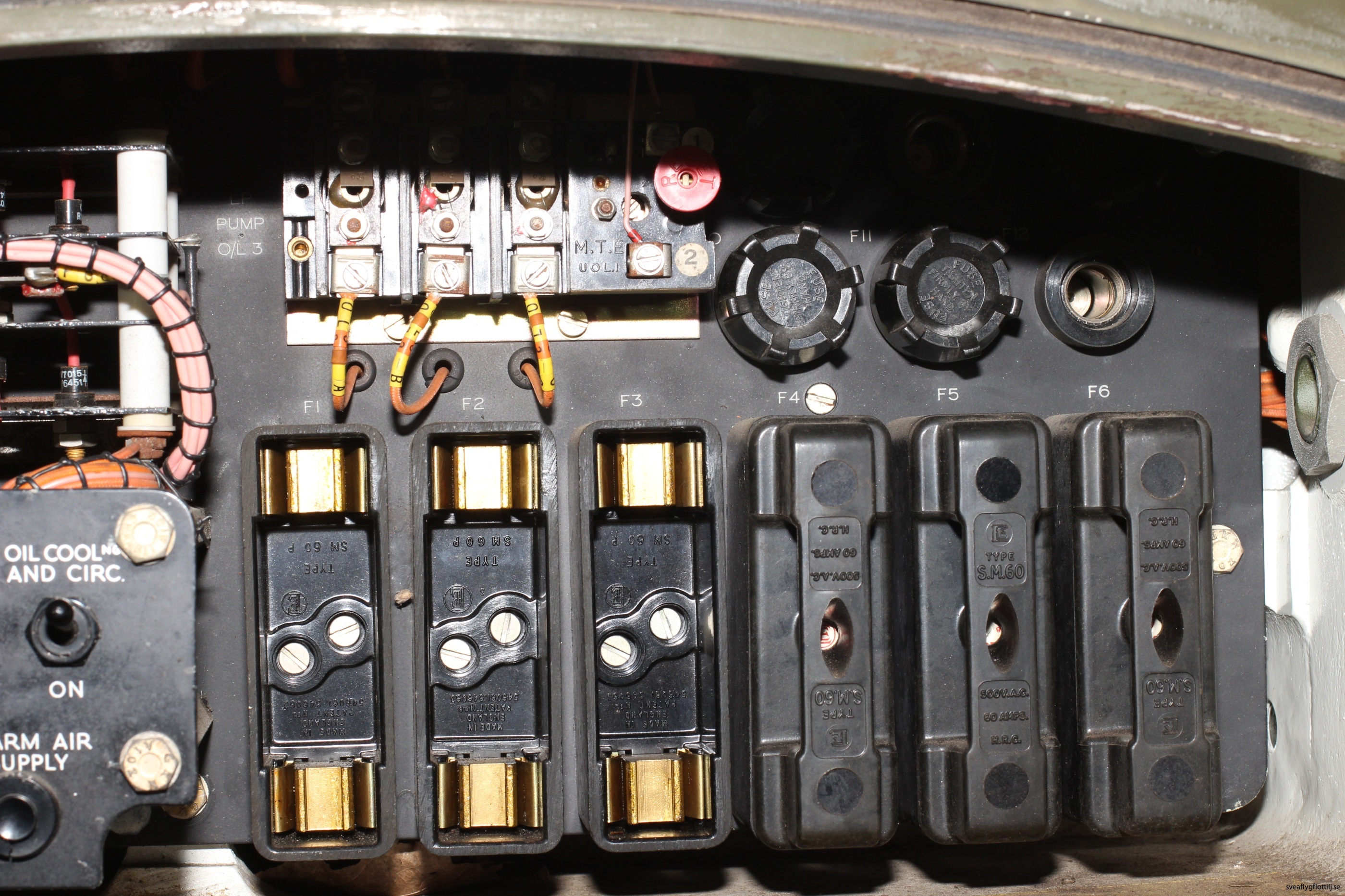
Säkringar på luckans insida.
Foto: Håkan Wall.
Telubs serviceetikett.
Foto: Håkan Wall.
Startbox.
Källa: BMPG.
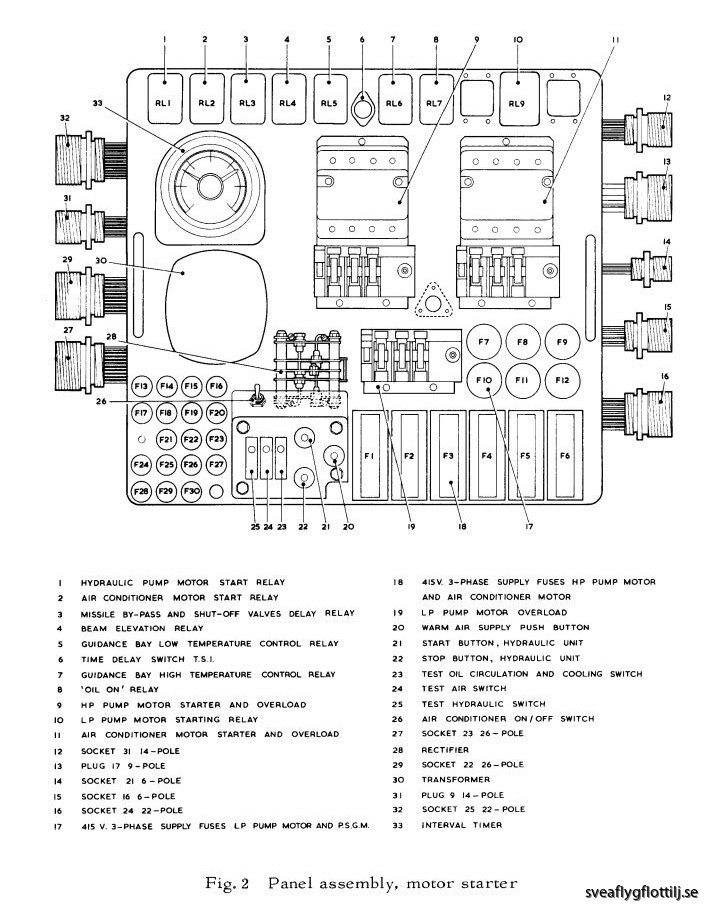
Startbox.
Källa: BMPG.
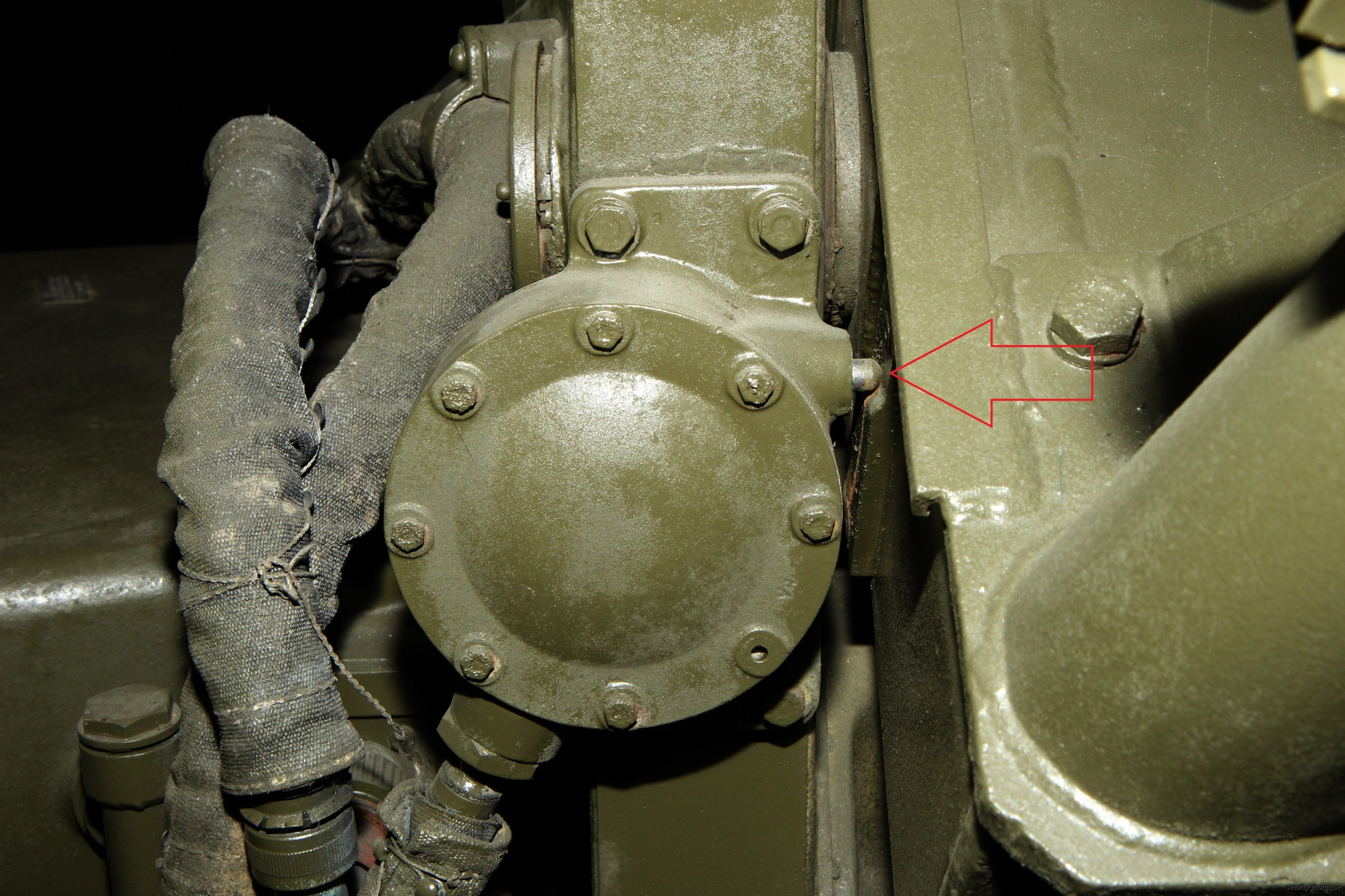
Mikroströmbrytare. Idag när man hör detta ord tänker man på något väldigt litet, så var det inte på den här tiden. När det markerade stiftet kommer i detta läge är lavetten eleverad i rätt läge, 34°.
Foto: Håkan Wall-
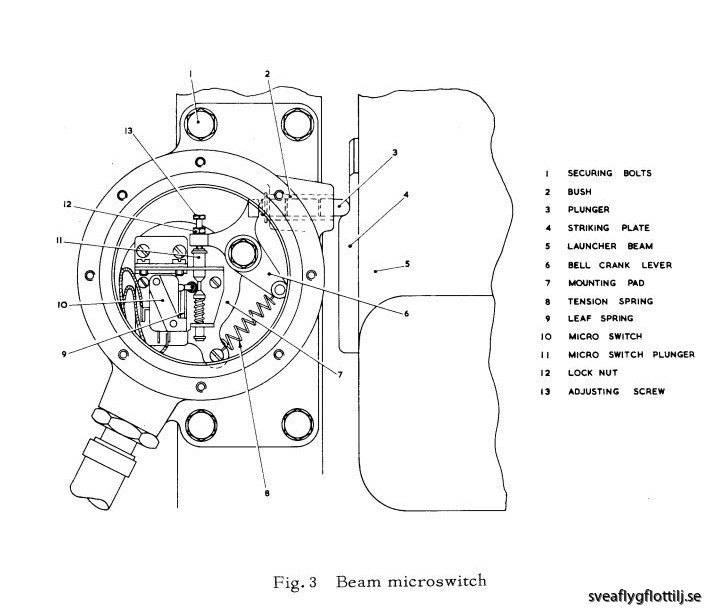
Mikroströmbrytaren.
Källa: BMPG.

Kraftenheten för styrdel.
Foto: Håkan Wall.

Kabelkontakter.
Foto: Håkan Wall.
Säkringar.
Foto: Håkan Wall.
Kraftenheten för robotens styrdel. I mitten upptill sitter säkringarna och nertill kabelkontakterna. Foto: MOD via Pete Harris.
Sidriktväxellådan driver lavettens roterande del och är fastskruvad i bottenplattan. Den drivs av sidriktenheten, som sitter ovanpå växellådan, bredvid jämförarenheten som också är en del av sidriktningsmekanismen.
På bottenplattan finns även motståndsboxen för avfyringskretsar. Dess uppgift är att säkerställa att ingen oavsiktlig avfyring sker vid åsknedslag.
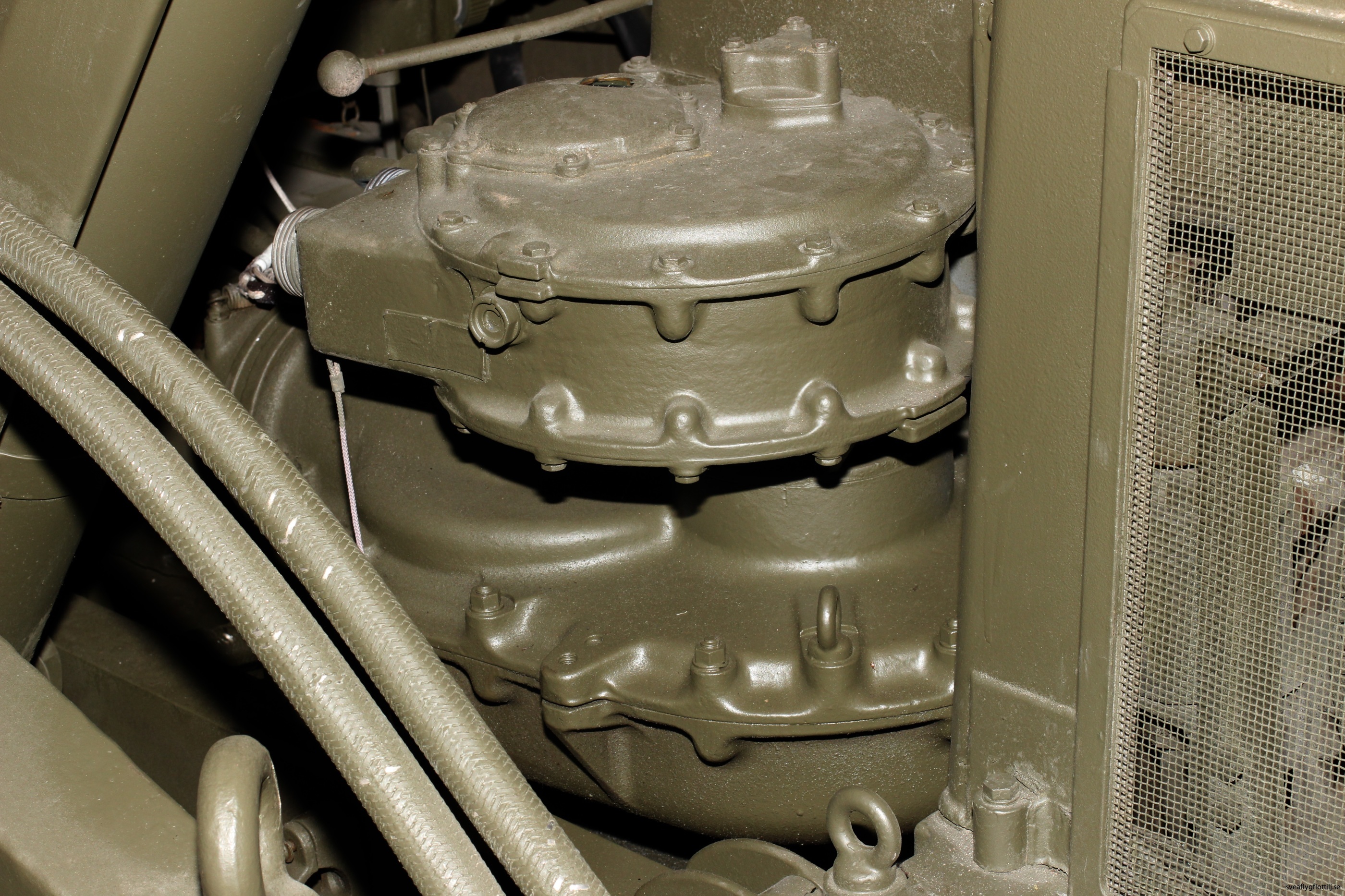
Sidriktenheten (överst) driver sidriktväxellådan (underst). Foto: Håkan Wall.
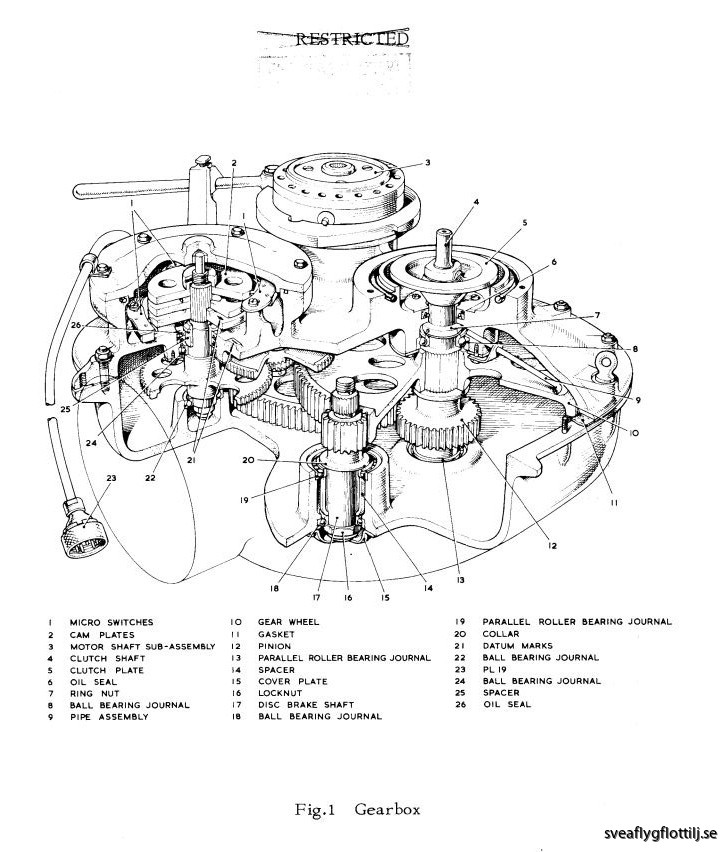
Sidriktväxellådan.
Källa: BMPG.

Sidriktenheten.
Foto: Håkan Wall.

Sidriktenheten.
Foto: Håkan Wall.

Jämförarenheten.
Foto: Håkan Wall.

Motståndsboxen för avfyringskretsar, åskskydd, (den övre enheten) och överföringsboxen (den undre enheten).
Foto: Håkan Wall.
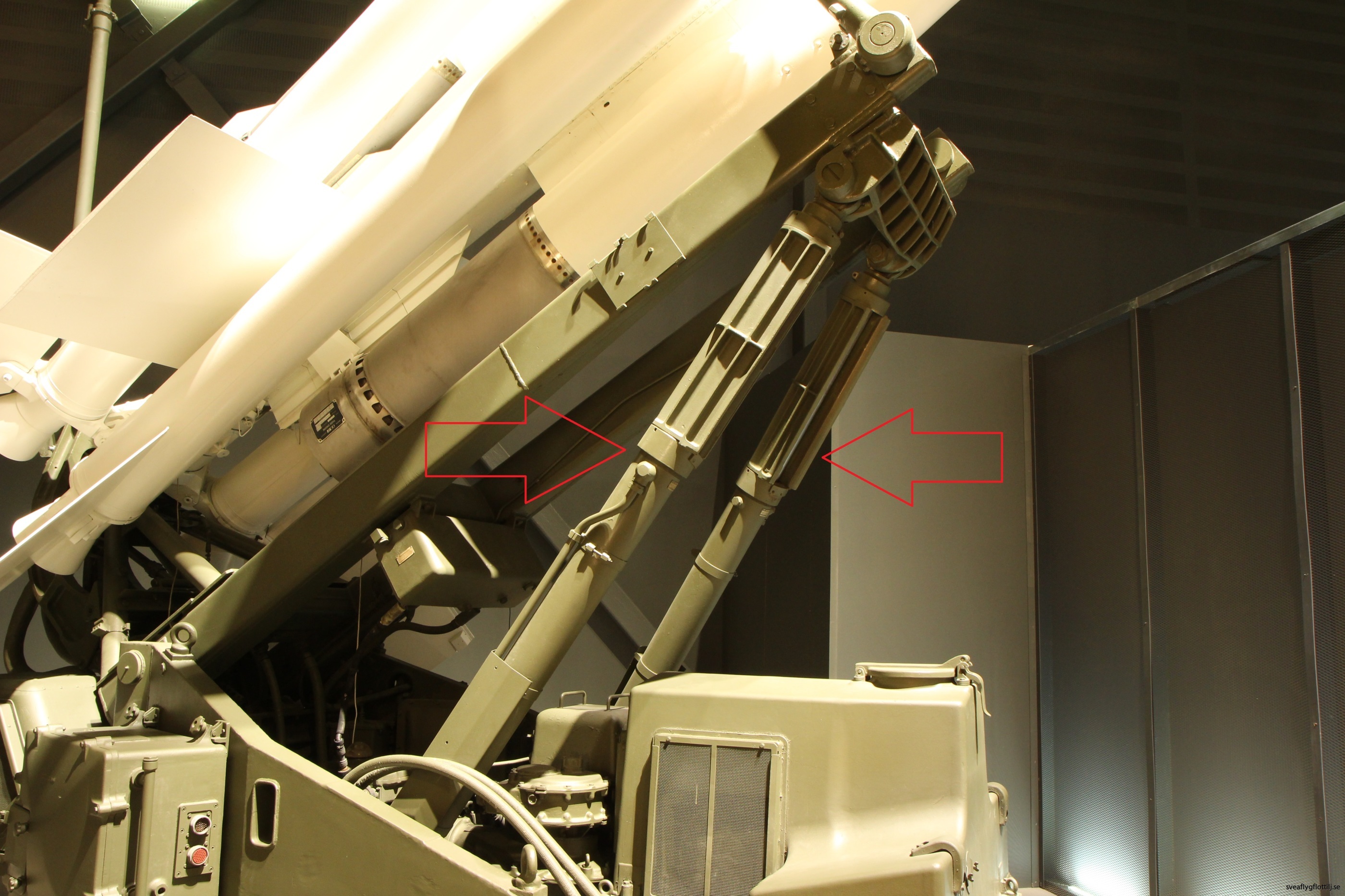
På bottenplattan finns fästen för eleverdomkrafterna (även kallade hyrauldomkrafter). Dessa används för att lyfta och sänka utliggaren. De är dubbelverkande, vilket innebär att de matas med tryckvätska både vid elevering och dumpning.
Eleverdomkrafterna låses med hjälp av distanshylsor som placeras på manöverkolvarna. När domkrafterna höjts till sitt högsta lägemonteras hylsorna och domkrafterna sänks. Detta medför att man har ett hydraultryck nedåt mot distanshylsorna och därmed erhåller en exakt höjdriktningsvinkel.
Eleververdomkrafter.
Foto: Håkan Wall.

Monterade distanshylsor.
Foto: Håkan Wall.
Bottenplatta, fästen för eleververdomkrafter (2), fästen för utliggaren (6).
Källa: BMPG.
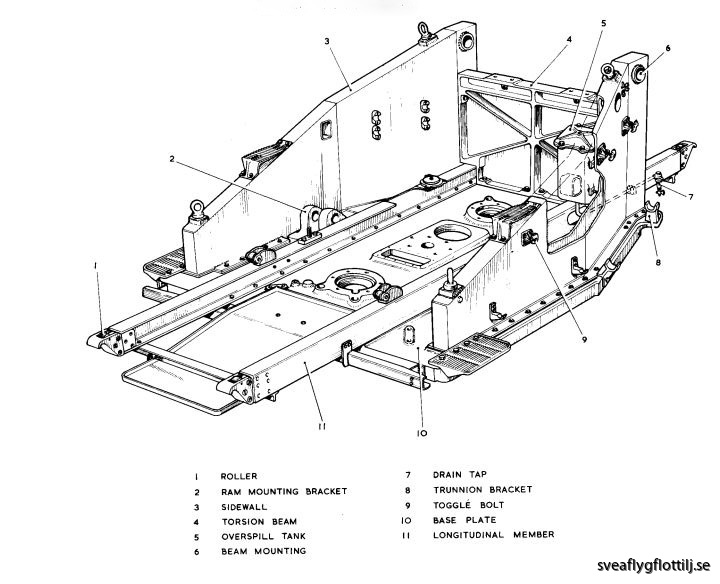
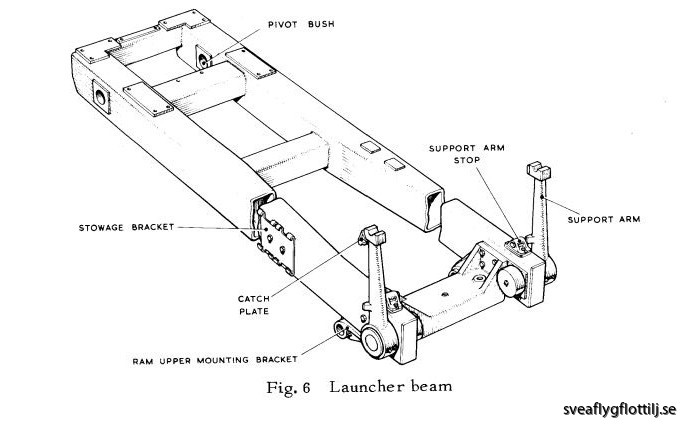
På lavettens utliggare placeras roboten. Utliggaren är 3,15 m lång och består av två lådbalkar och fyra tvärgående balkar. Längst fram på utliggaren, och på balkarnas utsida, finns robotens främre stödarmar. Dessa är vridbara och 55 cm långa. Med undre startraketernas främre fästen vilar roboten i stödarmarnas U-formade ytterändar.
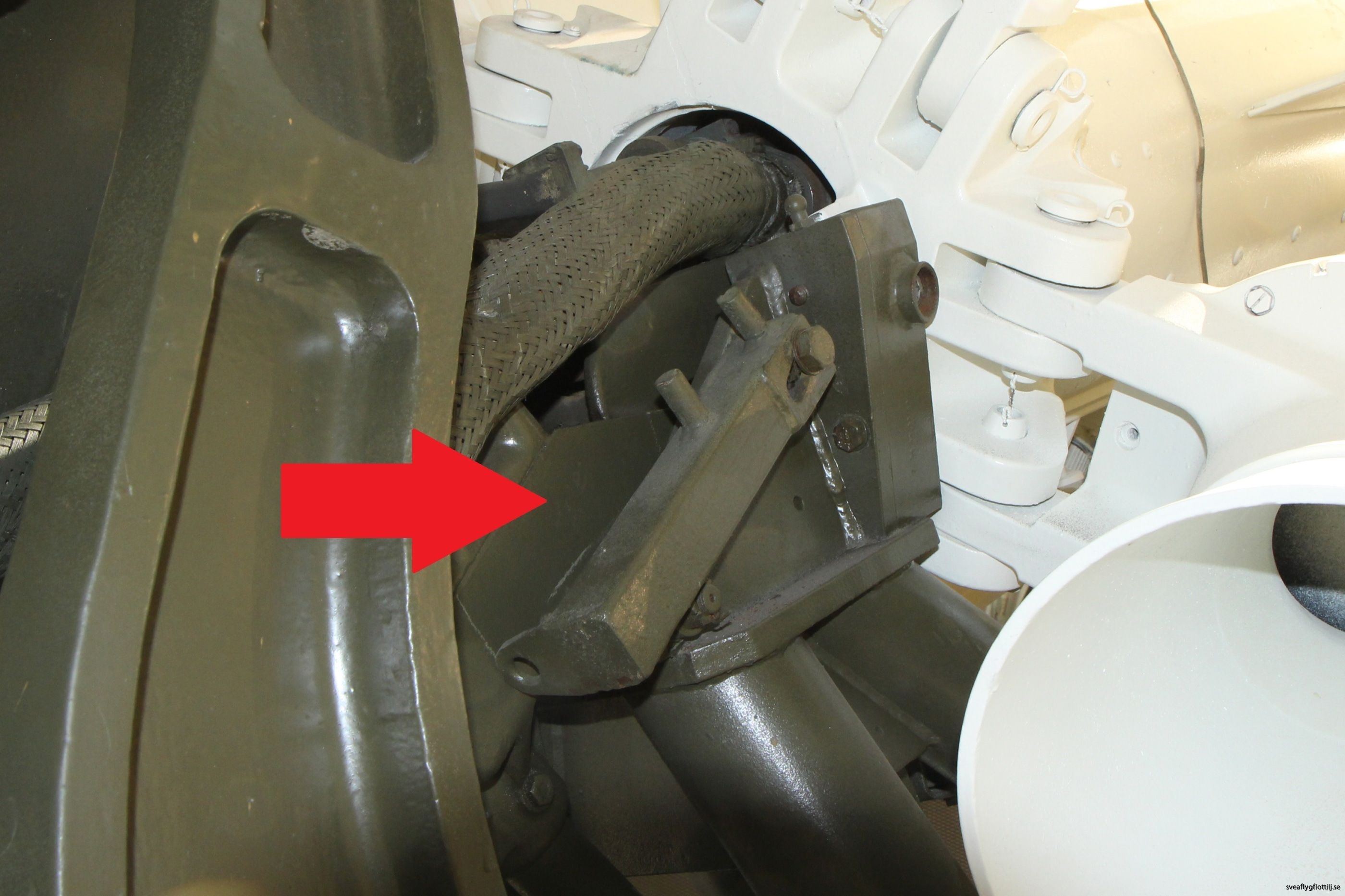
Robotens bakände fästs i kopplingsenheten. Detta är ett fyrbent underrede som dels bär upp roboten och dels har en koaxialkopplingsanordning där hydraulolja och tryckluft överförs till roboten. Kopplings-
anordningen kan fällas bakåt för att underlätta laddning.
I ett halvcirkelformat uttag hålls roboten fast på utliggaren med skjuvskruvar tills tillräcklig skjuvkraft utvecklas vid avfyring, (sjuvskruv är en skruv som är dimensionerade att brytas av när dragkraften har nått önskat värde). På kopplingsenhetens främre ben finns tre öglor som utgör fästen för de linor som ska dra loss bakre motorskydden och avfyringskablarna från roboten vid avfyring.
Utliggaren.
Källa: BMPG.
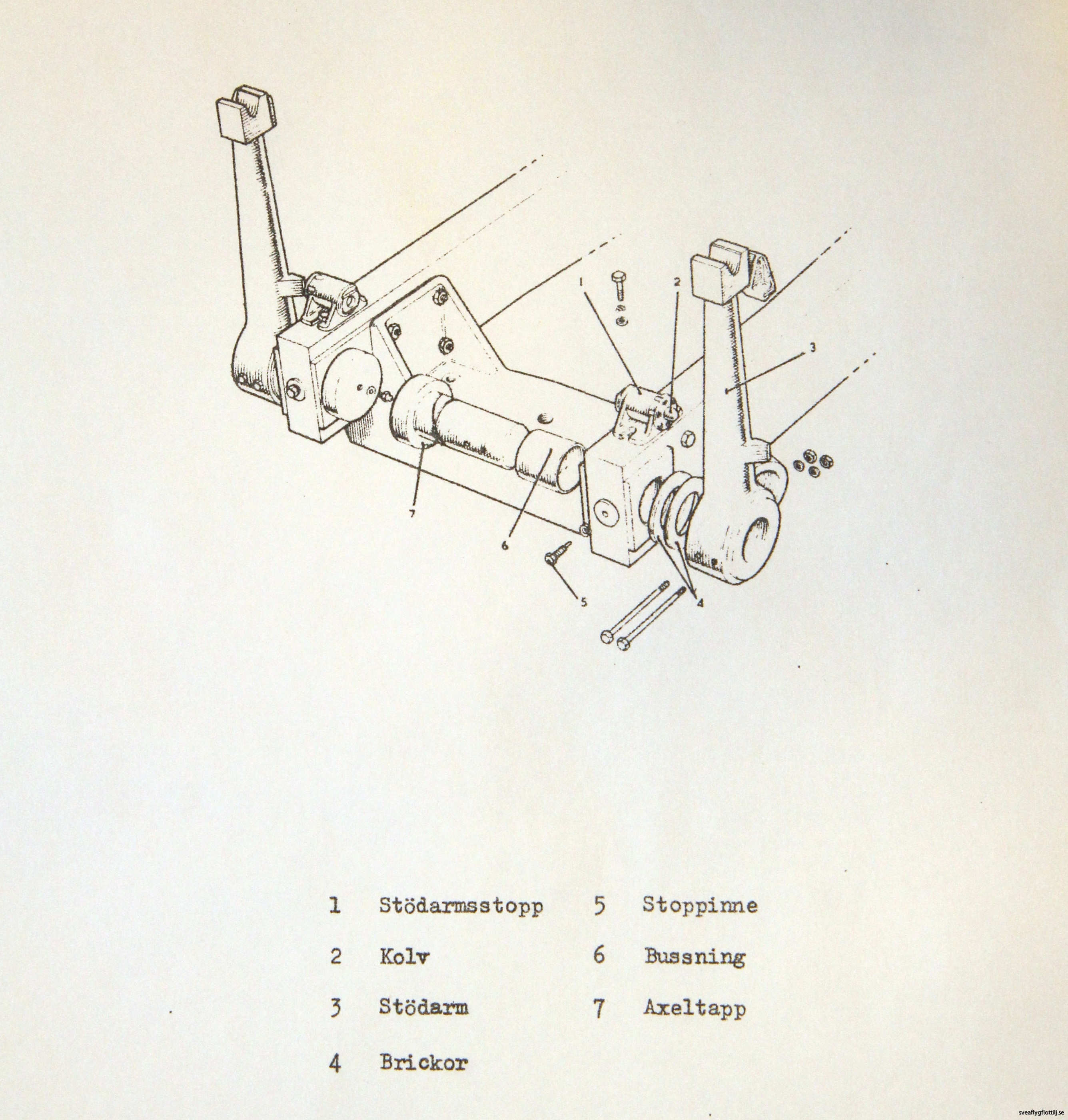
Utliggarens stödarmar.
Källa: FMV.

Utliggarens stödarmar.
Foto: Håkan Wall.

Startraketens främre fäste vilar i stödarmen.
Foto: Håkan Wall.

Kopplingsenheten.
Foto: Håkan Wall.
Kopplingsenheten.
Källa. BMPG.

Robotens bakände fäst i kopplingsenheten.
Foto: Håkan Wall.

Anslutningar via koaxialkopplingen.
Foto: Håkan Wall.
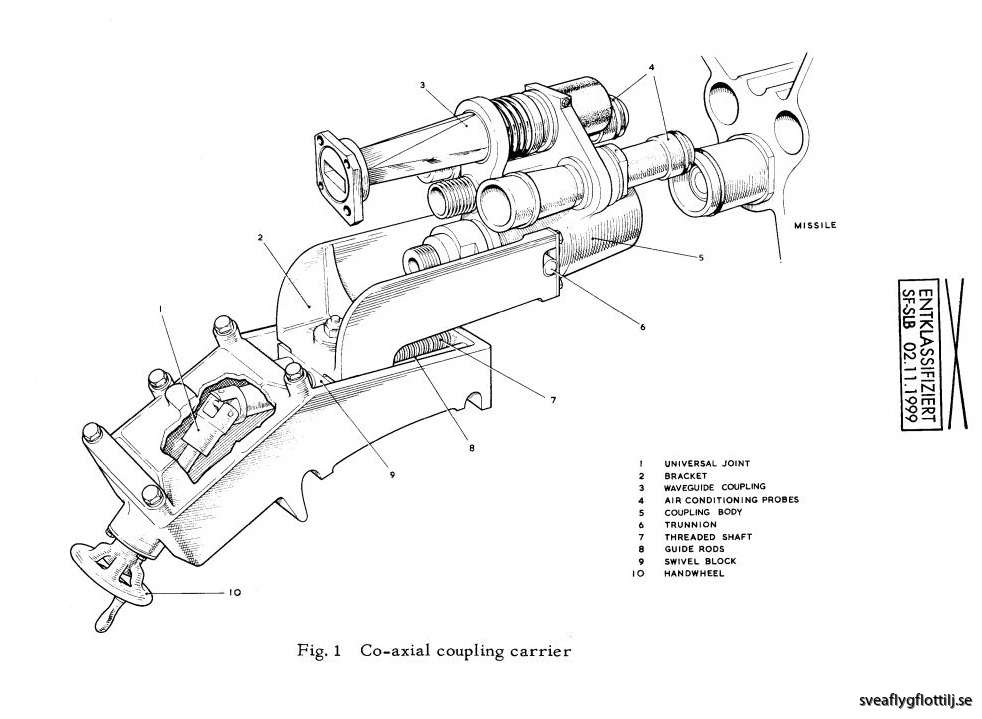
Koaxialkopplingen.
Källa: BMPG.

På kopplingsenhetens ben fästes en lina för att dra loss den nedre rammotorns bakre väderskydd.
Foto: Håkan Wall.
I detta fäste kopplades linan för att dra loss den övre rammotorns bakre väderskydd. På bilden är fästet i nedfällt läge, linan kopplades när fästet var i uppfällt läge.
Foto: Håkan Wall.

Väderskydd undre motor.
Foto: Håkan Wall.
Väderskydd övre motor.
Foto: Håkan Wall.
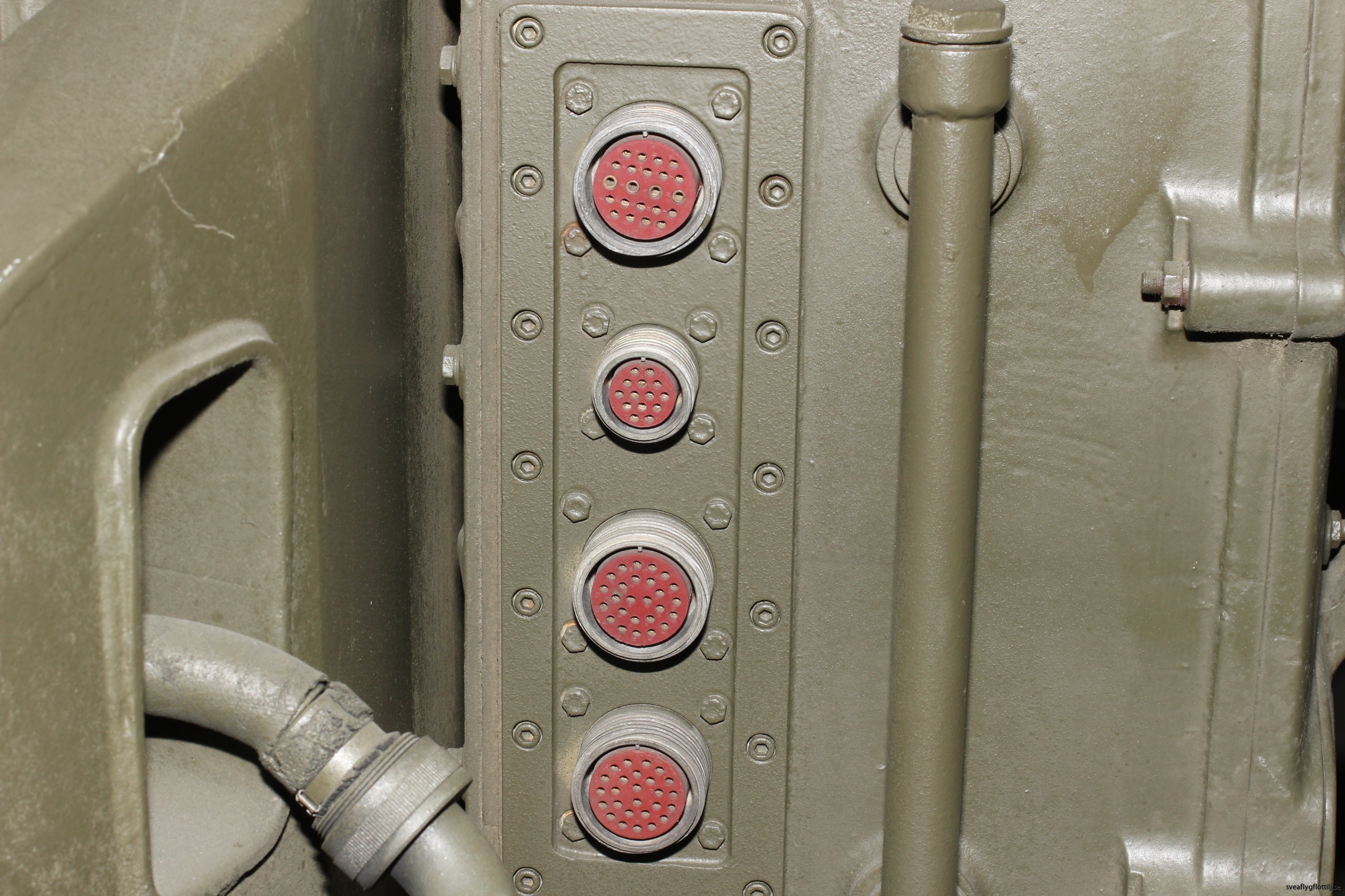
Kopplingsboxen för roboten är placerad på undersidan av andra tvärbalken räknat uppifrån. Till denna leds alla ledningar som kräver anslutning till roboten med undantag av tändledningar (till rammotorer, startraketer och temobatterier).
Ledningen från kopplingsboxen ansluts i roboten med en 191-polig kontakt, varav 154 är inkopplade. Kontakten är konstruerad så att den lätt ska lösgöras när roboten lämnar lavetten.

Kopplingsbox för robot på musierobot på F 17.
Foto: Håkan Wall med tillstånd av Försvarsmakten.

Kopplingsbox.
Foto: Håkan Wall.
Alla enheter har märkskyltar.
Foto: Håkan Wall.

Skyddslock för uttaget för den 191-poliga kontakten.
Foto: Håkan Wall.

Uttaget utan skyddslock.
Foto via Peter Harris, BMPG.

Kontakten ansluten till roboten.
Foto via Peter Harris, BMPG.
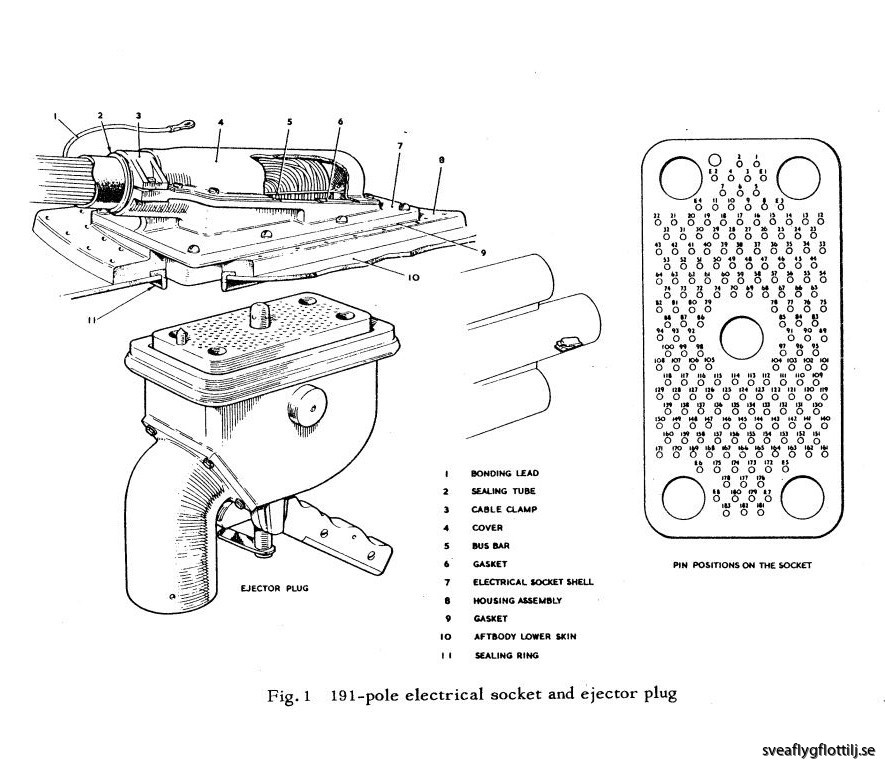
Den 191-poliga kontakten.
Källa: BMPG.
Markreferensantennen (även kallad sprötantenn) tar mot markreferenssignaler från belysningsradarn och vidarebefordrar dessa till roboten när den ligger på lavetten.
Antennen är monterad längst bak på överdelen och står vertikalt när lavetten är i skjutläge men den lutas bakåt 5° i robotladdningsläge.
I det cirka fem meter långa vertikala röret finns en koaxialkabel och kablar för uppvärmning av radomen. I nedre änden ansluts koaxialkabeln till en transformator och vidare till roboten genom en böjd vågledare som är ansluten till lavettens koaxialkoppling.
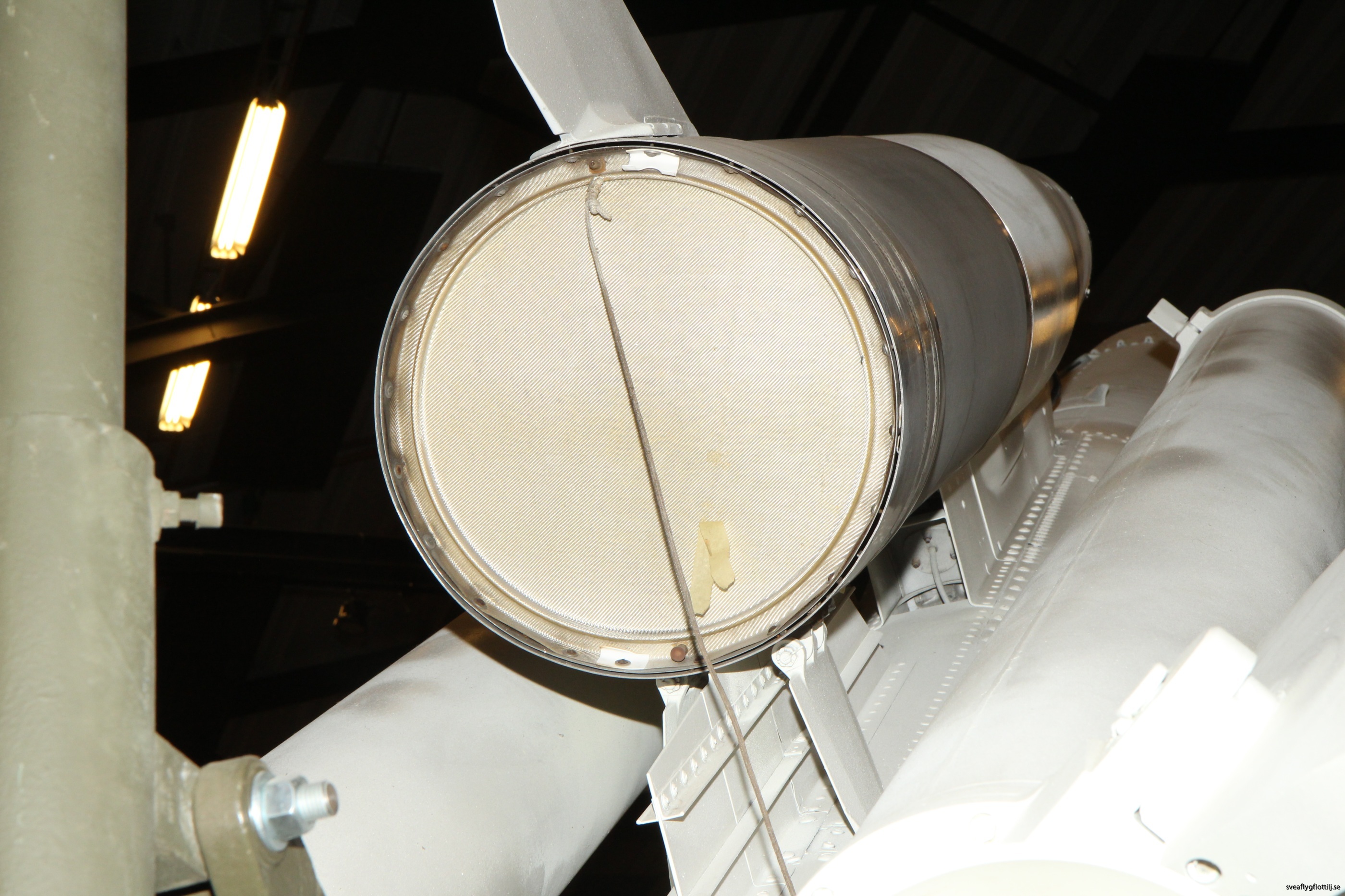
Högst upp på röret, cirka sju meter över marknivå, sitter radomen innehållande antennenheten.


Ovan: Markreferensantennens radom.
Foto: Håkan Wall.
Till Höger: Markreferensantennen i sin helhet. Klicka för att se hela antennen.
Foto: Håkan Wall.
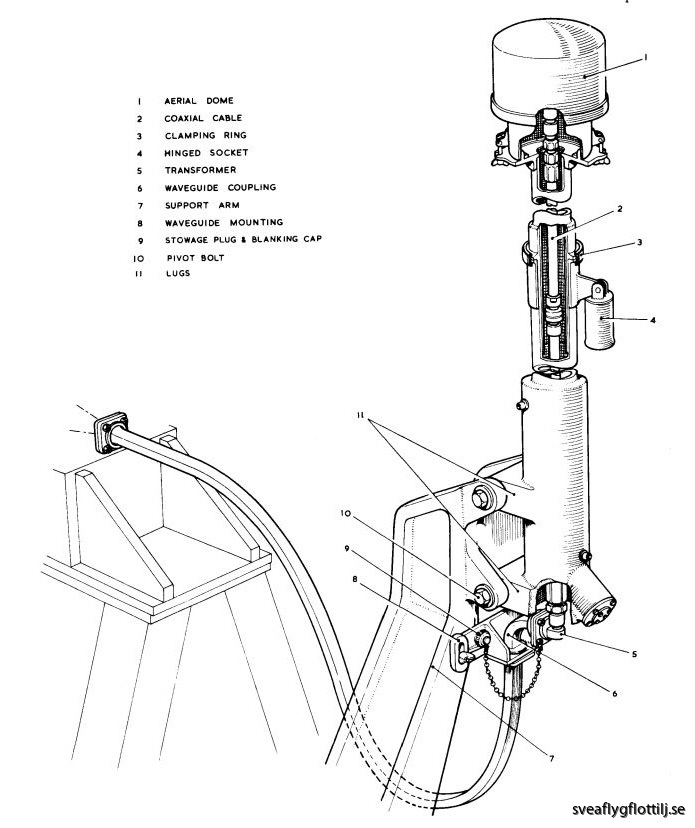
Markreferensantennen.
Källa: BMPG.

Vågledaren.
Foto: Håkan Wall.
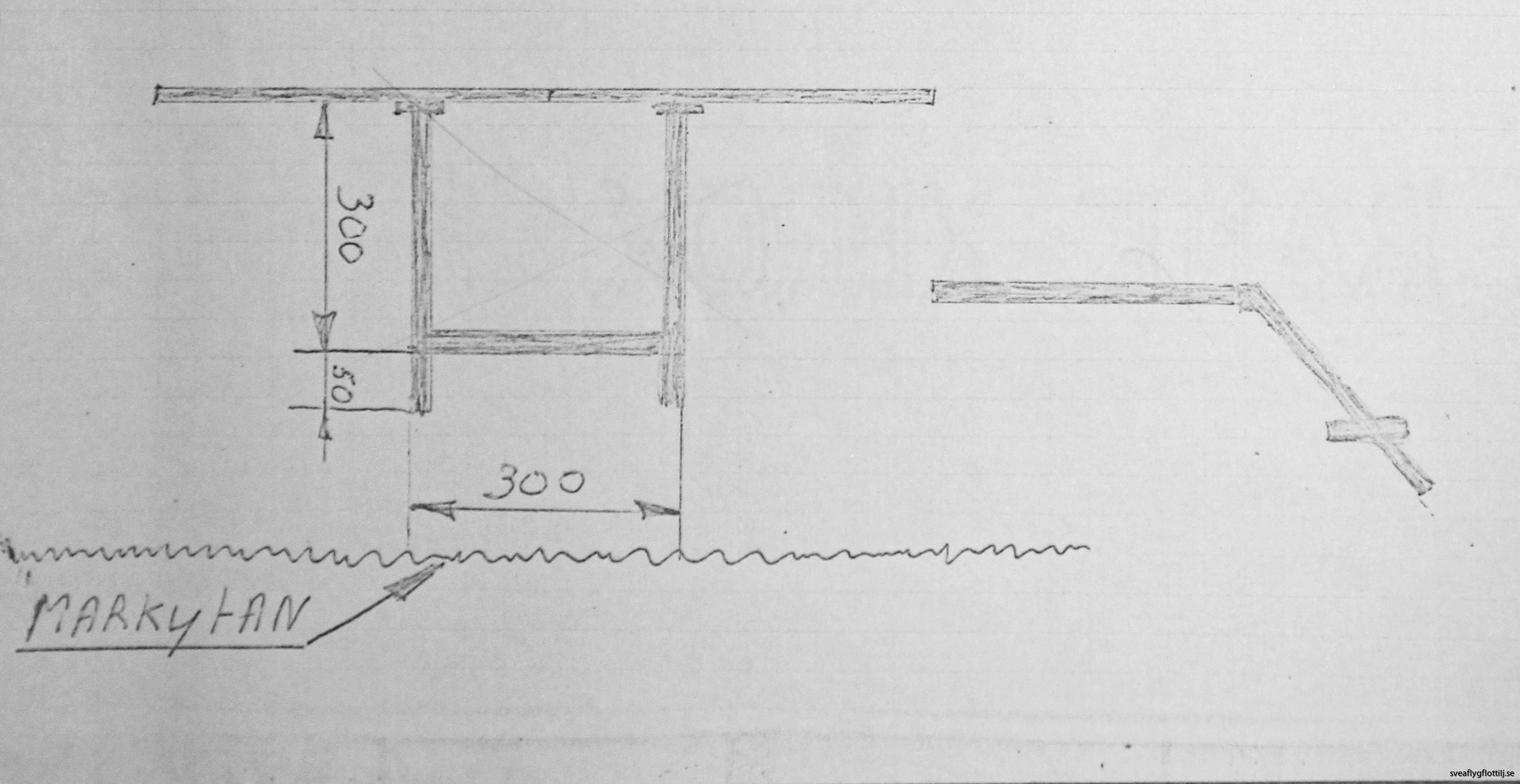
De rejäla fotsteg som finns på de svenska lavetterna är inte engelskt original. Under 1967 förslogs att lavetten skulle förses med större fotsteg. Anledningen var att det ursprungliga fotsteget var mycket litet och det fanns en olycksrisk vid arbete med lavettdomkrafterna, dessutom användes kåpan till hydraulenheten som fotsteg vilket var strängt förbjudet. Förslaget var att fotstegen skulle vara 80 x 30 cm och vara försedda med en avtagbar stege. Fotstegen infördes men utan stege.
Skissen visar den föreslagna stegen med ett trappsteg.
Bild via Arboga Robotmuseum.

På denna Schweiziska robot ser vi originalfotsteget på lavettens vänstra sida.
Foto: Håkan Wall.

Här ser vi vänstra sidan på en svensk lavett. Detta fotsteg är två delar på 90 x 31,5 cm och 32 x 31,5 cm.
Foto: Håkan Wall.

På denna robot i Schweiz ser vi originalfotsteget på lavettens högra sida.
Foto: Håkan Wall.

Här ser vi högra sidan på en svensk lavett. Detta fotsteg är på 167 x 31,5 cm. Till höger ser vi hydraulpumpsaggregatet som man inte fick använda som fotsteg.
Foto: Håkan Wall.
Nedan följer en sammanställning på lavetternas individnummer och var de tog vägen efter nedläggning.
De 48 lavetterna hade individnummer 251 – 298. 43 stycken av dessa såldes till MOD/RAF. Fem stycken blev kvar i Sverige tillsammans med var sin robot som ”minnesrobot”.
- Individ 275 placerades först på F 13 men återfinns idag hos Arboga Robotmuseum.
- Individ 277 placerades vid Telubs verkstäder i Risinge (idag SAAB).
- Individ 278 placerades på F 17 och finns kvar där på militärt område.
- Individ 279 placerades på F 10 och finns idag utanför Ängelholms flygmuseum.
- Individ 286 placerades hos Flygvapenmuseum i Malmslätt och finns idag i utställningshallen.
Individskylt.
Foto: Håkan Wall.