Kortfattad historik samt premiärvisningen vid F 8.
Kort efter andra världskrigets slut visade studier genomförda av armé- och flygstab att det skulle komma att bli nödvändigt för Sverige att inom en överskådlig framtid förstärka luftförsvaret med luftvärnsrobotar och redan i slutet av 40-talet hade försvarets robotbyrå ett luftvärnsrobotprojekt på ritbordet, ett projekt som sedermera aldrig genomfördes. Under ÖB-utredningarna på 50-talet togs frågan om luftvärnsrobotar upp vid ett flertal tillfällen. I ÖB-54 kan man läsa”För försvaret på de högsta höjderna synas mot tioårsperiodens senare del luftförsvarsrobotar med lång räckvidd bli mera lämpade än jaktflyg” och i ÖB-57 fanns att läsa”Som komplement till, och senare eventuellt som ersättning för, en del av jaktflyget anskaffas luftvärnsrobotar så snart det blir tekniskt möjligt”. I november 1957 gav ÖB direktiv om att en försöksverksamhet med luftvärnsrobotförband skulle startas, en verksamhet som skulle innebära attluftvärnsrobotar anskaffades utifrån.
Under 1957/1958 genomfördes vidare studierför att se om möjligheten fanns att anskaffa ett för armén och flygvapnet gemensamt försökssystemsystem, något som fastslogs under hösten 1958. Man sökte på världsmarknaden efter ett lämpligt system och fastnade slutligen för Bristol Bloodhound Mk I, i Sverige senare benämnd Rb 365. I oktober 1958 tecknades ett kontrakt med en livstidskostnad om 30 MSEK. Köpet omfattade tretton robotar (varav tolv kom att placeras på Lv 3 i Norrtälje och en vid F 2 i Hägernäs), nio lavetter, tre eldledningsradar, en komplett eldledningscentral till Lv 3, en ej komplett eldledningscentral till F 2 samt en mängd kringmaterial. Leveranserna påbörjades under 1959. Under 1961/1962 genomfördes teknisk och taktisk systemutprovning något som senare skulle visa sig gav en mycket god erfarenhet och kunskap inför arbetet med Rb 68. Försöktverksamheten varade officiellt mellan den 1 oktober 1958 och 30 september 1963 men var i huvudsak avslutad redan under hösten 1962.

Rb 365 uppställda på grupperingsplatsen vid Lv 3 i Norrtälje.
Foto: Okänd, keditering efterlyses.
I början av juni 1961 föreslogs det att man skulle anskaffa Bristol Bloodhound Mk II, vilken i Sverige skulle få beteckningen Rb 68. I anskaffningsbeslutet motiverades inköpet på följande sätt;
”För att bibehålla och förbättra luftförsvarets möjligheter att infria målsättningen enligt gällande försvarsbeslut är det önskvärt att komplettera jaktflyget med robot 68, främst på grund av att detta vapensystems förmåga att bekämpa snabba mål och till hög insatsberedskap. Det är också värdefullt att robot 68-förbanden kan sättas in mot vapenbärande flygplan, spaningsflygplan och störflygplan som uppträder på höjder ovanför våra jaktflygplans praktiska verkanshöjd”.
I slutet av juni 1961 fick flygvapnet bemyndigande att beställa materiel till sex divisioner till viken man hade avbeställningsrätt för tre. 1963 fastställdes dock antalet divisioner till sex. Rb 68 var en vidareutveckling av Rb 365, bland annat så hade den bättre prestanda och målsökning, men den stora skillnaden var att Rb 68 skulle vara rörlig. Systemet konstruerades av ett konsortium av brittiska industriföretag med British Aircraft Corporation (B.A.C) som sammanhållande företag. Under sommaren 1961 åkte en delegation på cirka 30 personer från flygstaben och flygförvaltningen över till Storbritannien för specifikationsutformning av systemet och kontraktsdiskussioner. Respektive leverantör träffades under två dagar vardera, och efter en två veckor lång rundresa innehållandes ett mycket stort antal möten samlades den svenska delegationen och representanter för leverantörerna i London för en slutgenomgång och högtidlig kontraktsunderskrift.
Den 1 oktober 1961 blev kontraktet officiellt godkänt. Budgeten uppgick till cirka 800 MSEK fördelat till cirka 400 MSEK för leveranser från Storbritannien och cirka 400 MSEK för leveranser i Sverige av exempelvis fordon, master samt fortifikatoriska anläggningar. Beställningen omfattande bland annat tolv eldledningsradar (brr), tolv eldledningscentraler (rbgc), 48 robotlavetter och 116 robotar varav 20 var avsedda för provskott. Materielleveranserna genomfördes under åren 1963 till 1965.
Det genomfördes omfattande leveranskontroller i Sverige. Detta berodde på att materielenheter endast slutprovades separat vid varje leverantörs fabrik vilket nödvändiggjorde att man i Sverige behövde kontrollera att systemet skulle fungera som det var tänkt när alla enheter var ihopkopplade innan de levererades till förband. Proven genomfördes i allmänhet av personal från leverantörerna själva och de svenskar som var med vid proven fungerade som kontrollanter. Denna omfattande provverksamhet ledde till att ett 30-tal britter fick spendera 2-3 år vid den nyuppsatta robotverkstaden på F 8 där många av de olika proven genomfördes. Arbetet komplicerades av att det inte fanns några färdiga föreskrifter för hur dessa prov skulle genomföras och i vilken ordning saker skulle göras. Dessa föreskrifter fick skrivas och diskuteras kring direkt före varje provomgång. För att ytterligare komplicera saken var man vid ett flertal tillfällen tvungen att revidera sina egna föreskrifter då de visade sig att de olika robotgrupperna hade olika modifieringsstandard vid leverans. Orsaken till detta var att det förekom liknande leveransprov hos leverantörena i Storbritannien inför deras leveranser till RAF. När man upptäckte problem, fel eller brister åtgärdades detta vilket i sin tur ledde till att varje ny robotgrupp som leverades till Sverige hade en hel del nya detaljer som det behövdes ta hänsyn till. Britterna var dessutom synnerligen dåliga på att informera Sverige om dessa modifikationer vilket naturligtvis ledde till en hel del irritation och troligtvis en och annan svordom. Dessa problem samt ett flertal leveransförseningar gjorde att den ursprungliga tidsplanen fick revideras hela sju gånger, men trots detta så kunde den första robotgruppen levereras till F 8 skoldivision under hösten 1964. Resteranade robotgrupper leverades därefter med cirka två månaders mellanrum fram till senvåren 1966. De Rb 365 som fanns kvar efter försöksverksamheten vid Lv 3 och F 2 modifierades, målades om och fördelades ut till robotdivisionerna där de användes som blindrobotar vid hanteringsövningar med nyinryckta värnpliktiga.

Full gruppering av Rb 365 (åtta stycken) uppställda vid Lv 3 i Norrtälje.
Foto: Okänd, krediering efterlyses.
Enligt riksdagsbeslutet 1963 organiserades det inom flygvapnet sex robotdivisioner fördelade till en övningsdivision vid flottiljerna F 10, F 12, F 13, F 17 samt en övningsdivision och en skoldivison vid F 8. Skoldivisionen vad F 8 skötte den primära utbildningen av officerare och underofficerare i teknisk tjänst medan resterande övningsdivisionerna skötte utbildningen av de värnpliktiga. Varje övningsdivision hade i fred tillgång till två kompanier. Ett kompani i ständig beredskap inom kuppförsvaret och ett för utbildning av värnpliktiga. På varje flottilj fanns det en fredsgrupperingsplats, dit kuppförsvarsuppgiften var förlagd, samt en utbildningsplats, även kallad exercisplats. För att man även skulle kunna öva under fältmässiga förhållanden fanns även en övningsgrupperingsplats. Den var förlagd cirka 10 mil från flottiljen och var utformad så att man kunde öva och uppträda så som man skulle förväntas göra i händelse av krig. Man övade där under cirka åtta veckor per år och övade då allt från enkla hanteringsövningar till kompletta stridsgrupperings- och tillämpningsövningar. Att övningsgrupperingsplatsen låg så långt bort som den gjorde motiverades med att man på ett meningsfullt sätt ville kunna öva motormarscher och övriga transporter. Samtliga övningsdivision hade som tidigare nämnts uppgifter inom kuppförsvaret. Förbanden hade i fred en mycket hög beredskap. Detta möjliggjordes genom att det dels på varje flottilj fanns en fredgrupperingsplats vid vilken en beredskapsgrupp alltid var eldberedd med några få timmars varsel och dels genom att det alltid fanns en stor andel aktiv personal och många tillgängliga värnpliktiga. Det senare möjliggjordes genom två årliga inryckningsomgångar. Fredsgrupperingsplatsen var konstant uppkopplad med samband mot Lcf men man kunde även från fredsgrupperingsplatsen genomföra autonom strid inom tilldelade sektorer. Att man endast kunde genomföra autonom strid inom tilldelade sektorer berodde på att belysningsradarn saknade IK-utrustning och således kunde inte förbandet själva avgöra om ett mål var fientligt eller inte.
I flygstabens målsättning för Rb 68 stod bland annat att förbanden skulle bekämpa kvalificerade mål exempelvis mål med överljudsfart, störande mål, mål över och utanför jaktens verkansområde samt att inom jaktens verkansområde kunna förstärka luftförsvaret. Robotsystemets strid skulle i normala fall ledas från Lcf och därför inrättades det inom STRIL-systemet en särskild robotledningsorganisation. Från STRIL-systemet skickades måldata via radiolänk till robotgruppcentralen där informationen bland annat utnyttjades för inriktning av belysningsradarn. Belysningsradarn sökte av det angivna målområdet, fångade målet och följde därefter automatiskt målet. Uppgifter om målets fart, avstånd och kurs behandlades av robotgruppcentralen för att bland annat beräkna avfyringstidpunkt. Efter avfyrning övertogs styrningen av robotens målsökare. Vid mobilisering övergick övningsdivisionerna till att vara tolv stycken autonoma luftvärnsrobotkompanier. Kompanierna skulle etappvis omgrupperas till sina spridningsplatser vilka låg i närheten av kompaniets inryckningsplats och mobförråd. Kompaniet krigsorganiseras med chefsgrupp, robotpluton, radarpluton och stab- och trosspluton, totalt 138 man varav 13 var officerare och 125 värnpliktiga/krigsplacerade. Därefter påbörjades motormarschen till sitt grupperingsområde. Varje kompani hade ett eget grupperingsområde. Inom varje grupperingsområde fanns tre krigsgrupperingsplatser varav en var i förhand utsedd till förstahandsplats. Organisation, utbildning och utrustning var anpassade för ett självständigt uppträdande med frekventa omgrupperingar mellan alternativa platser, man skulle inte vara beroende eller ha stöd av något annat förband i fält. Allt man behövde för att kunna utföra sin uppgift i strid hade man med sig.
Avveckling.
Redan i Luftförsvarsdoktrin LFU 67, som låg till grund för utformning och utveckling av luftförsvaret under – 70-talet, drogs slutsatser att robot 68 inte skulle vara ett stridsekonomiskt vapensystem. Utredningen drog slutsatsen att telemotmedel skulle utvecklas så mycket att systemet blev verkningslöst. C FV konstaterar i maj 1970 att någon ersättare till Robot 68 på 80-talet inte är aktuell, men Robot 68 borde under hela -70-talet ha en väsentlig uppgift att fylla. C FV framställer tre avvecklingsalternativ. 1) Avveckling av krigsorganisationen i takt med spaningsradar Ps 860 leverans och personalbehov. 2) En långsam avveckling mellan 1972-1981. 3) En snabb avveckling mellan 1972-1975. Senare redovisas ett fjärde förslag med avveckling mellan 1982-1983.
I maj 1972 föreslår C FV att robot 68 ska avvecklas under 1972/73 och att förbanden skulle förrådsställdas med en mobiliseringstid på 5 månader för 50% av förbanden och för resterande fjorton månader. Under hösten samma år tillsätter ÖB en utredning där man kommer fram till att systemet ska läggas ner snarast men att möjligheten finns att behålla två divisioner tills 1977/78, detta beräknas kosta 4 miljoner som skulle tillföras Flygvapnet.
I detta läge var inga beslut tagna vilka förband som skulle avvecklas och vilka som skulle överleva fyra år till. En manuell notering tyder på att beslutet togs 6 april 1973. Detta innebar att F 13 och F 17 omvandlades till robotbataljoner med ansvar för totalt sex krigskompanier, varar två var förrådsställda, och att en rbgc-simulator skulle placeras på F 17.
De ohämmat stigande utvecklingskostnaderna för Viggen-projektet var en orsak till att Robot 68 avvecklades i förtid. Från och med hösten 1976 började en succesiv nedtrappning av krigsorganisationen och den 30 juni 1978, nästan på dagen fyra år efter det att robotdivisionerna vid F 8, F 10 och F 12 lades ner, lades Luftvärnsrobotsystem 68 slutligen ned totalt i Sverige.
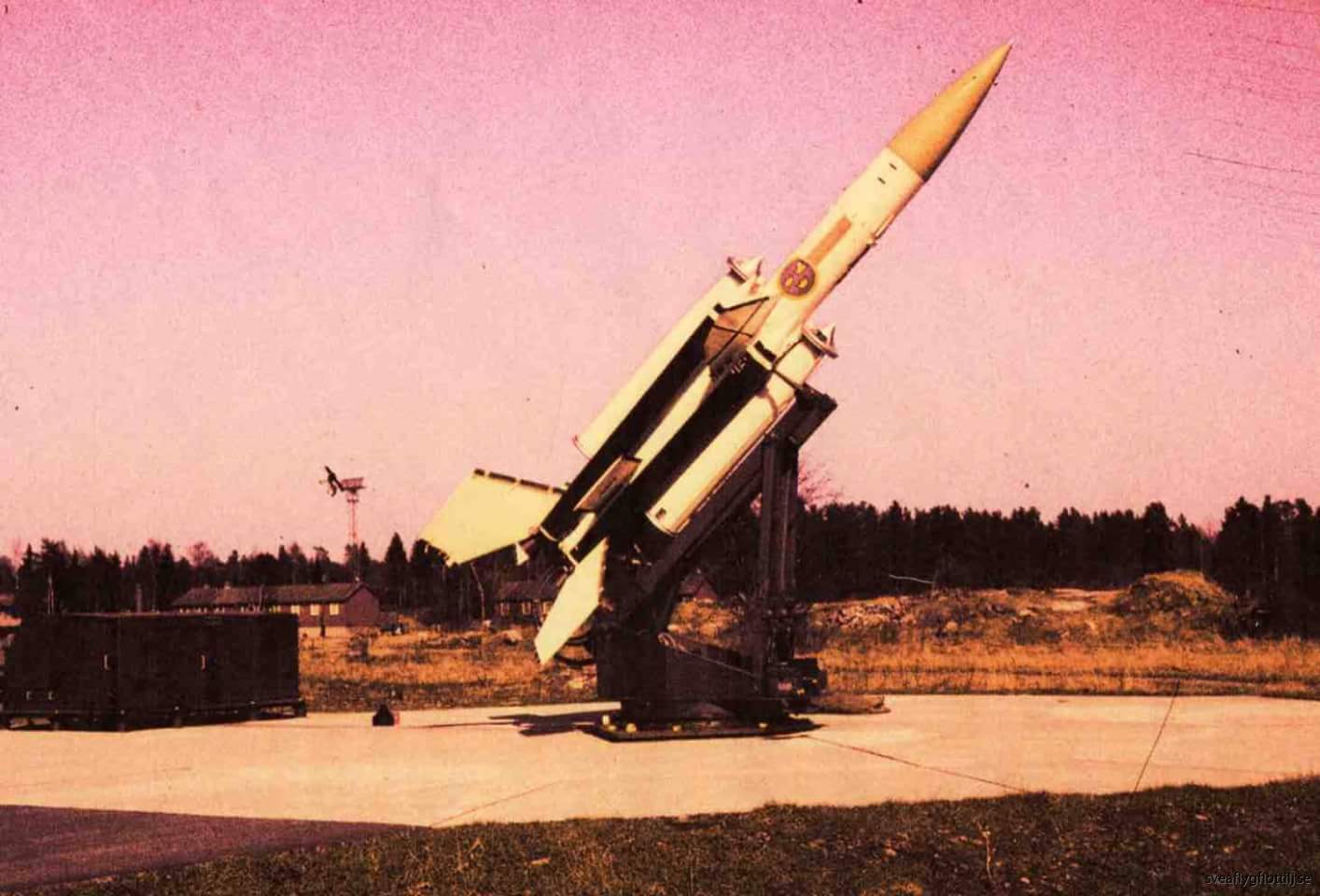
Rb 365 uppställd vid grupperingsplatsen på Lv 3 i Norrtälje. Notera kronmärkningen på framkroppen samt
PJ-21 i bakgrunden.
Foto: Okänd, kreditering efterlyses.
Premiär!

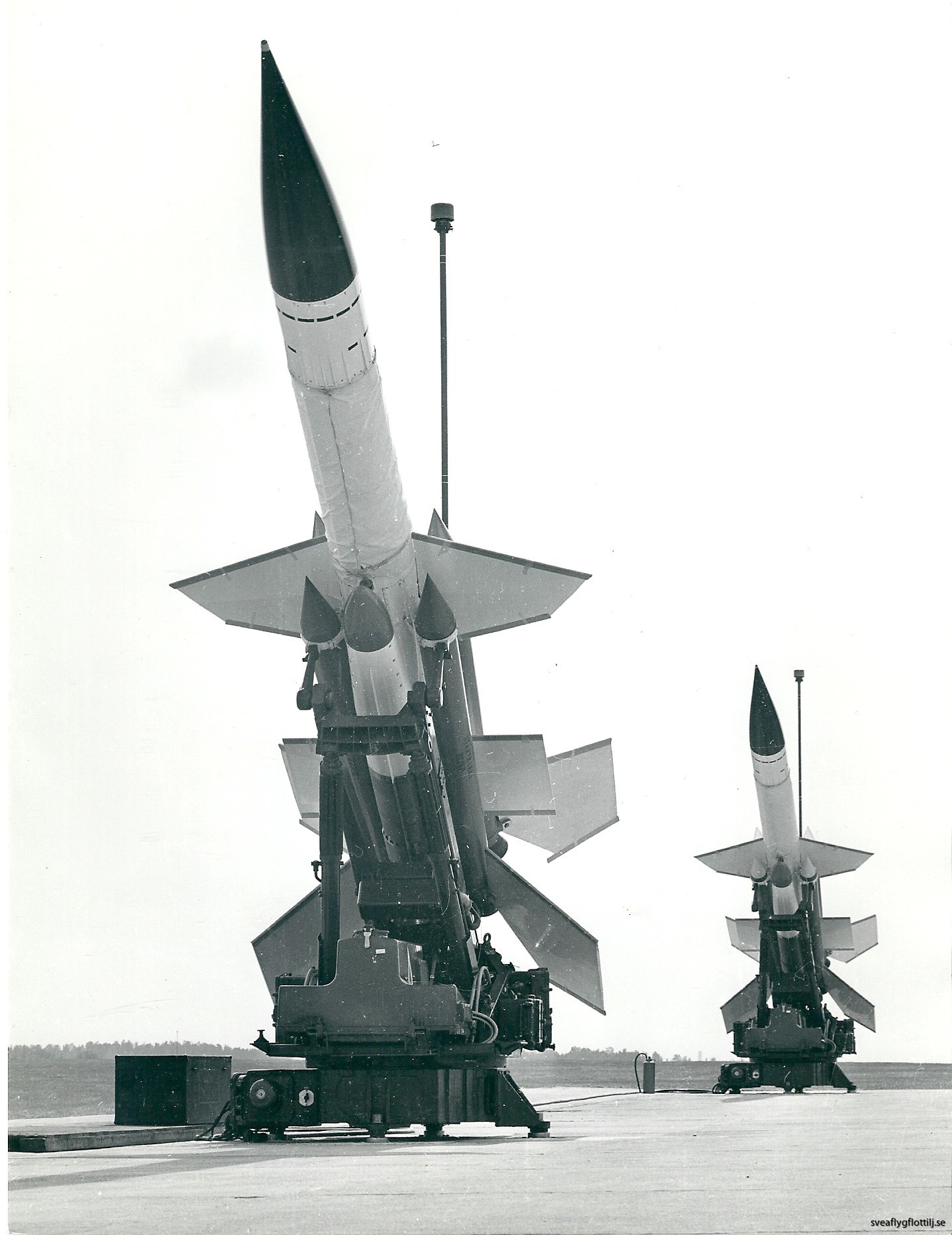
Fullt grupperad robotgrupp vid bantröskel 21 på F 8den 12 maj 1965. Notera simulatormasten som står mellan de två robotarna till vänster i bild.
Foto: Arboga Robotmuseum.
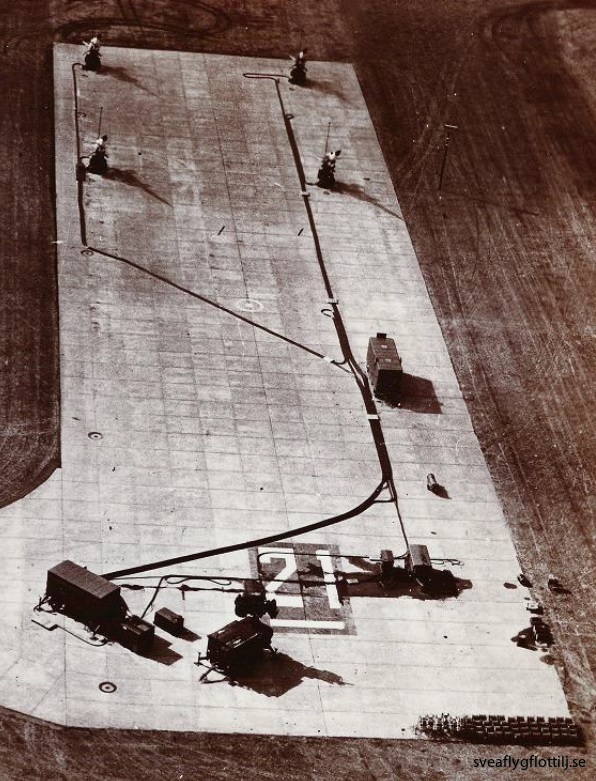
Flygfoto över bantröskel 21. Samtlig teknisk utrustning, bortsett från radiolänkmast, syns på bild.
Foto: Arboga Robotmuseum.
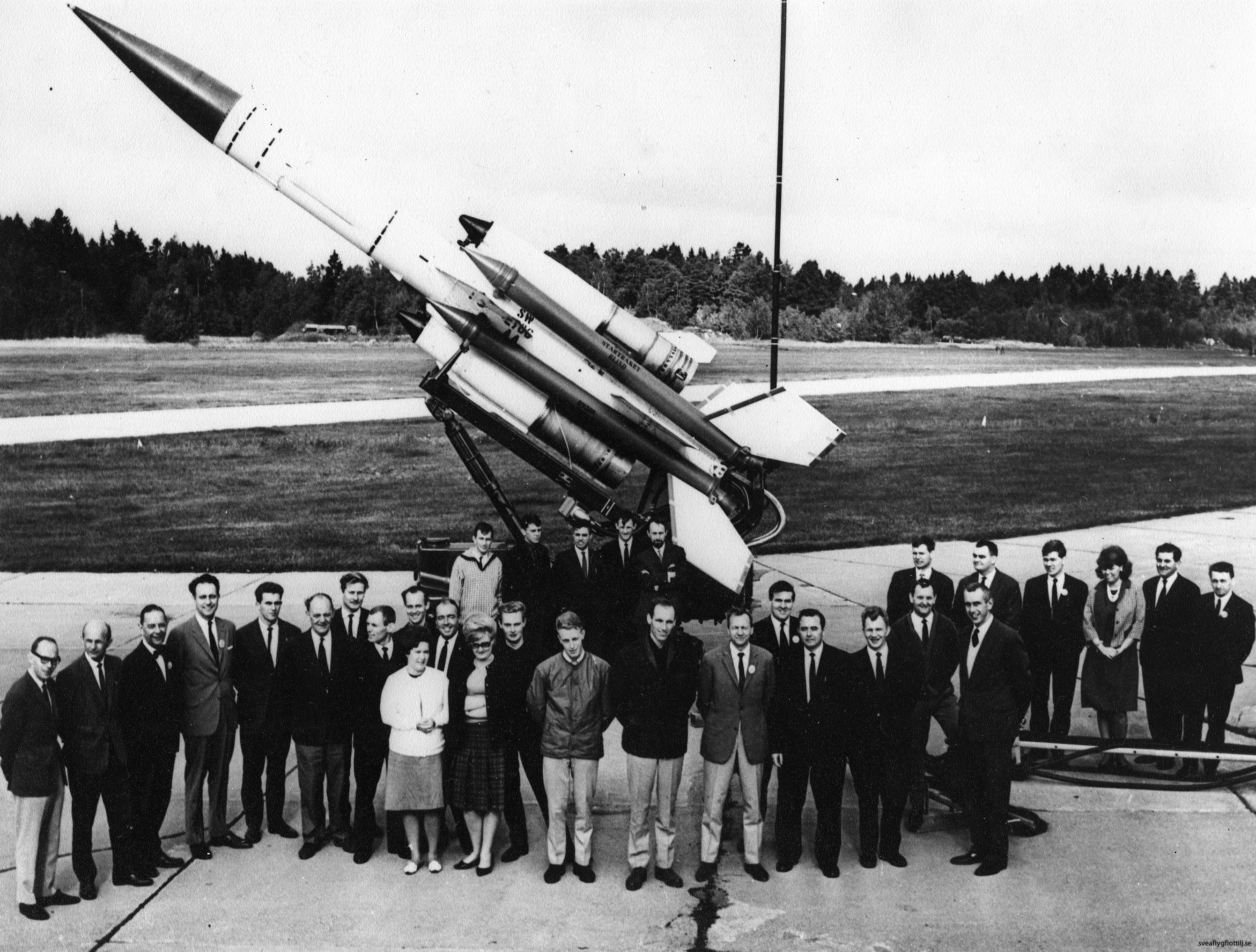
Uppställning vid det officiella överlämnandet av den första leveransen.
Foto: via BMPG.

Vy i sydlig riktning.
Foto: Arboga Robotmuseum.
En mäktig syn!
Foto: Arboga Robotmuseum.