Målsökare
Dess uppgift är att efter startfasen styra roboten mot den beräknade träffpunkten, även kallad framförpunkten. Robotens målsökare var mycket avancerad för sin tid och klarade sin uppgift utan hjälp av en dator. Den har halvaktiv målsökning vilket innebär att målet belyses kontinuerligt av en belysningsradar på marken och målsökaren använder sig av den från målet reflekterande signalen för att få målinformation. Om målet skickar ut en stark störsignal med avsikt att dränka belysningsradarns signal och få roboten att tappa målets position så använder målsökaren istället störsignalen, som kommer från samma position som den riktiga signalen, och låser på den istället. Störsignalen måste dock vara stabil för att detta ska fungera.
Målsökaren låser inte på målet förrän efter raketfasen, vilket innebär att man före avfyring måste rikta in antennen så att den kommer att peka mot målet vid raketfasens slut. Datamaskinen i robotgruppcentralen gör denna beräkning med hjälp av målets fart, kurs och höjd. Informationen överförs från belysningsradarns markreferensantenner så länge roboten ligger på lavett via lavettens referensantenn till roboten. Efter avfyringen sänds motsvarande signal via belysningsradarns flygreferensantenn.
Roboten tar emot referenssignalen genom en bakåtriktad trattantenn som sitter längst bak på robotkroppen. Målsökarens roterande antenn riktas inlåses med dessa uppgifter. Antennen söker inom en kon med toppvinkel på 10 grader, och inom den ytan ska målet befinna sig när roboten övergår i flygfasen. Antennen består av en aluminiumparabol med en diameter på ca 43 cm och en yagiantenn. Denna antenn gör att signaler som reflekterats på parabolreflektorn blir starkare jämförtmed signaler som träffar yagiantennen direkt. Antennen är placerad 2,5 grader vid sidan om rotationsaxeln och när den roterar skapas avsökningskonen enl. ovan. Antennen är hela tiden inriktad mot en punkt mitt i målet medan roboten riktas mot en punkt strax framför målet (framförpunkten). Om två olika belysningsradar belyser ett och samma mål reflekteras två olika signaler, för att robotens målsökare ska låsa på rätt signal måste den veta att det är rätt belysningsradar den får signal ifrån. Detta löses genom att belysningsradarn dels modulerar huvudsignalen mot målet med en lågfrekvenssignal med unik frekvens för varje radar-station, dels sänds samma lågfrekvenssignal med flygreferensantennen direkt till roboten i luften. För att ytterligare reducera förväxlingsrisken är även X-bandsfrekvensen unik för varje radarstation. Denna frekvenssignal tas emot i robotens bakåtriktade trattantennen. När dessa lågfrekvenssignaler stämmer överens är det rätt mål målsökaren lokaliserat.
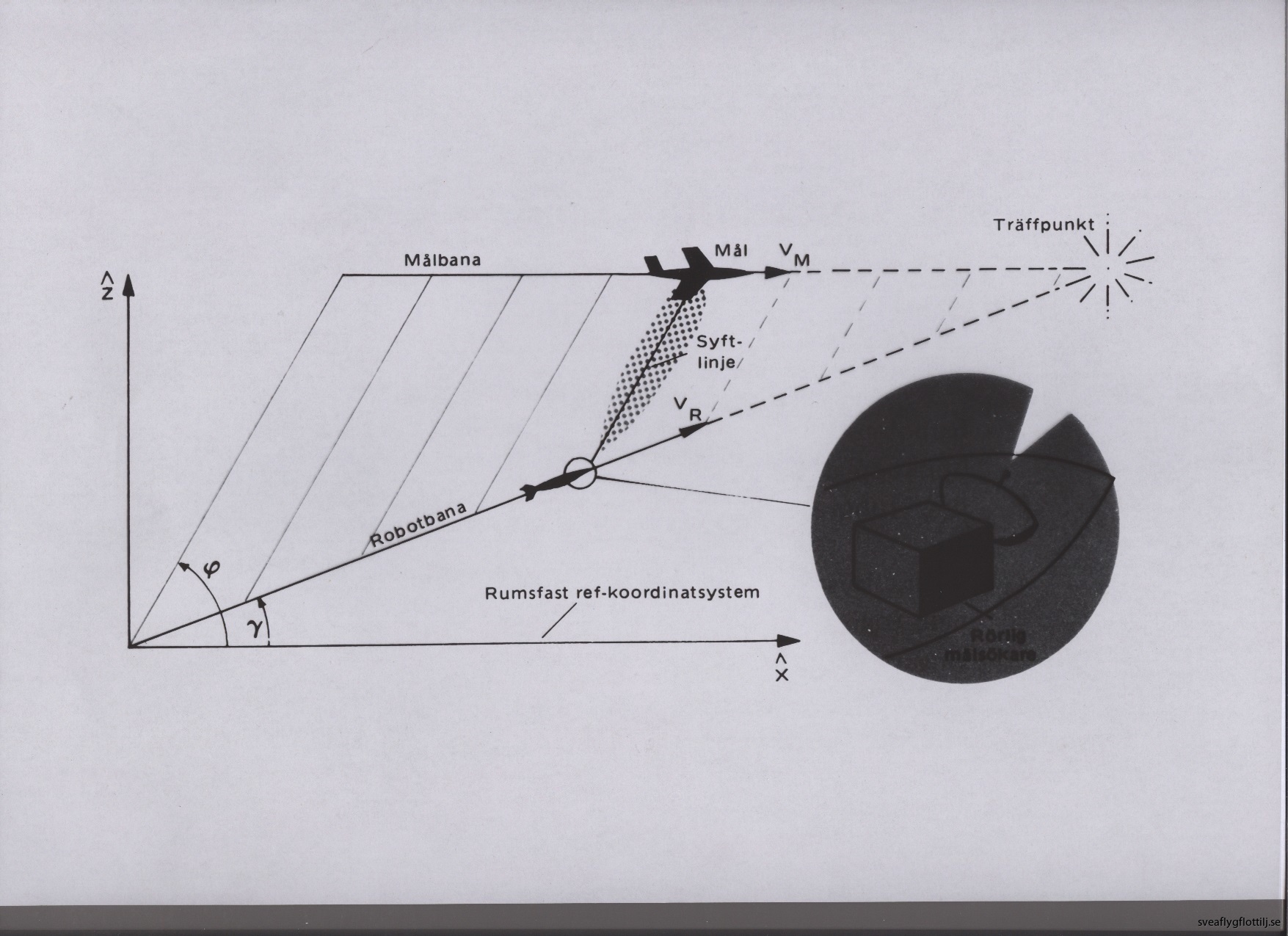
En målsökande robot etablerar en syftlinje till målet. Syftlinjen är en tänkt linje i rymden mellan robot och mål. Eftersom både målet och robotens hastighet varierar så ändras kontinuerligt syftlinjen. Eftersom roboten är konstruerad att alltid peka mot framförpunkten korrigerar den sin kurs löpande för att bibehålla sin syftbäring till målet oförändrad. Med denna typ av styrning åstadkoms kortast möjliga flygtid med minsta möjliga bränsleåtgång. Dock finns en viss fördröjning inbyggd för att undvika allt för skarpa svängar med stora g-krafter. Antennen ska hela tiden peka rakt mot målet oavsett robotens rörelser. Därför finns ett antenngyro vars rotationsaxel alltid är inriktad längs syftlinjen till målet. Om syftlinjen ändras uppmäts ändringen och gyrot justeras så att antennen riktas mot den nya syftlinjen. En styrsignal går till vingservona för att även justera robotens kurs mot den nya framförpunkten. Vingarna är enbart konstruerade för att svänga uppåt, alltså mot robotens övre rammotor. För att svänga nedåt måste roboten rolla 180 grader.Då kommer den övre motorn att peka ner mot marken och när vingarna då svänger ”uppåt” så dyker den istället. För att rolla ställs en vinge i plusläge och en minusläge. För att svänga vänster görs en roll på 90 grader och samtidigt som vingarna tippar för sväng ”uppåt”.
Målsökaren sänder roll- och tippsignal samtidigt. Målsökarsystemet är extremt känsligt och minsta fel kan ge en felaktig målsökning. Några felkällor som nämns är att antenngyrots lägesgivare inte är korrekt intrimmade, att radomen inte är tillverkad optiskt perfekt vilket kan orsaka brytningsfel eller att det är obalans i något gyro. Fel kan även uppstå i de många kretskort som enheten innehåller. Dessa är konstruerade för att tåla den höga g-belastning som roboten utsätts för.

Målsökare med parabolantenn och yagiantenn. I bakgrunden står en radom.
Foto: Håkan Wall.

Foto: Håkan Wall.
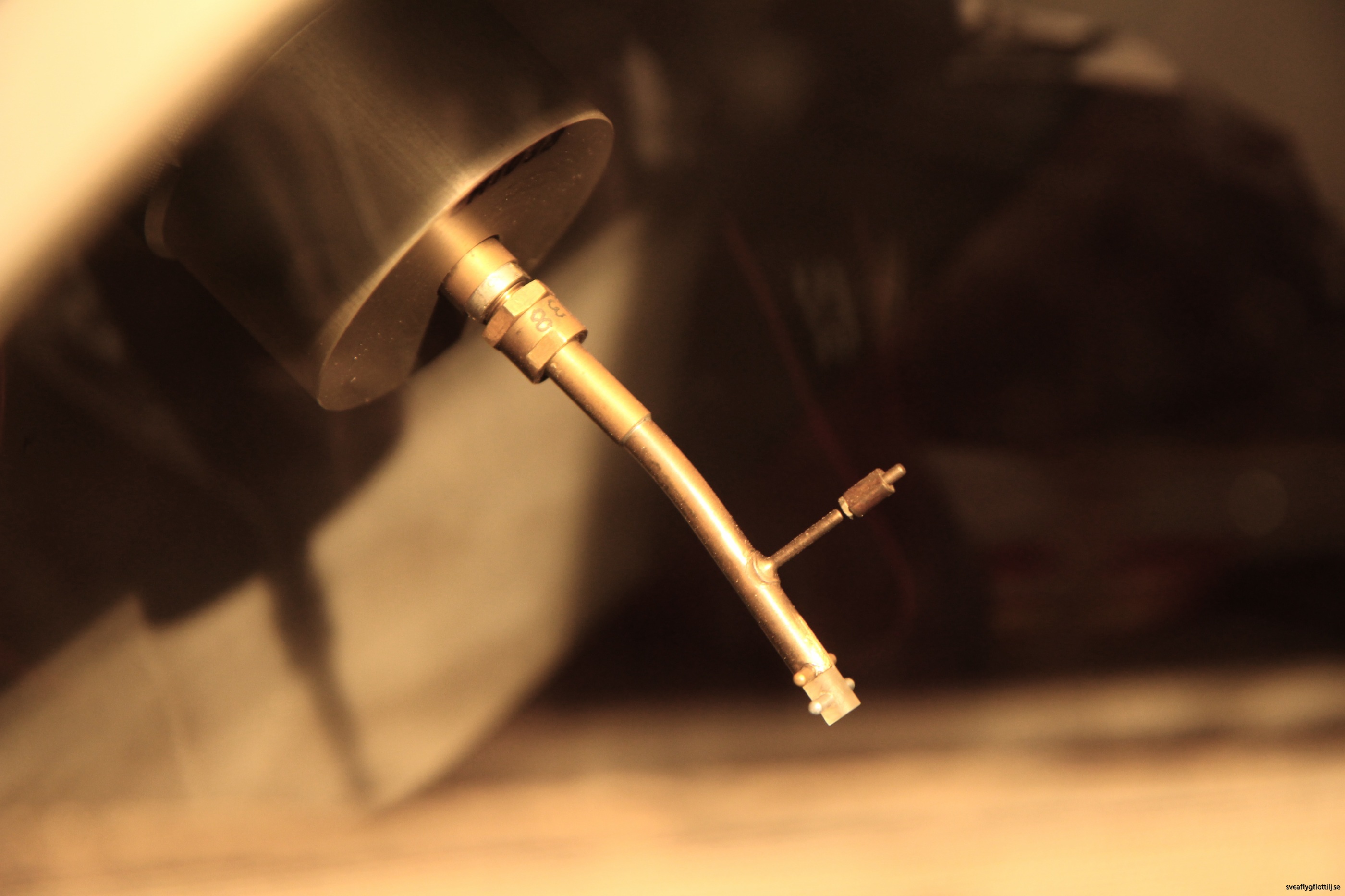
Yagiantenn.
Foto: Håkan Wall.
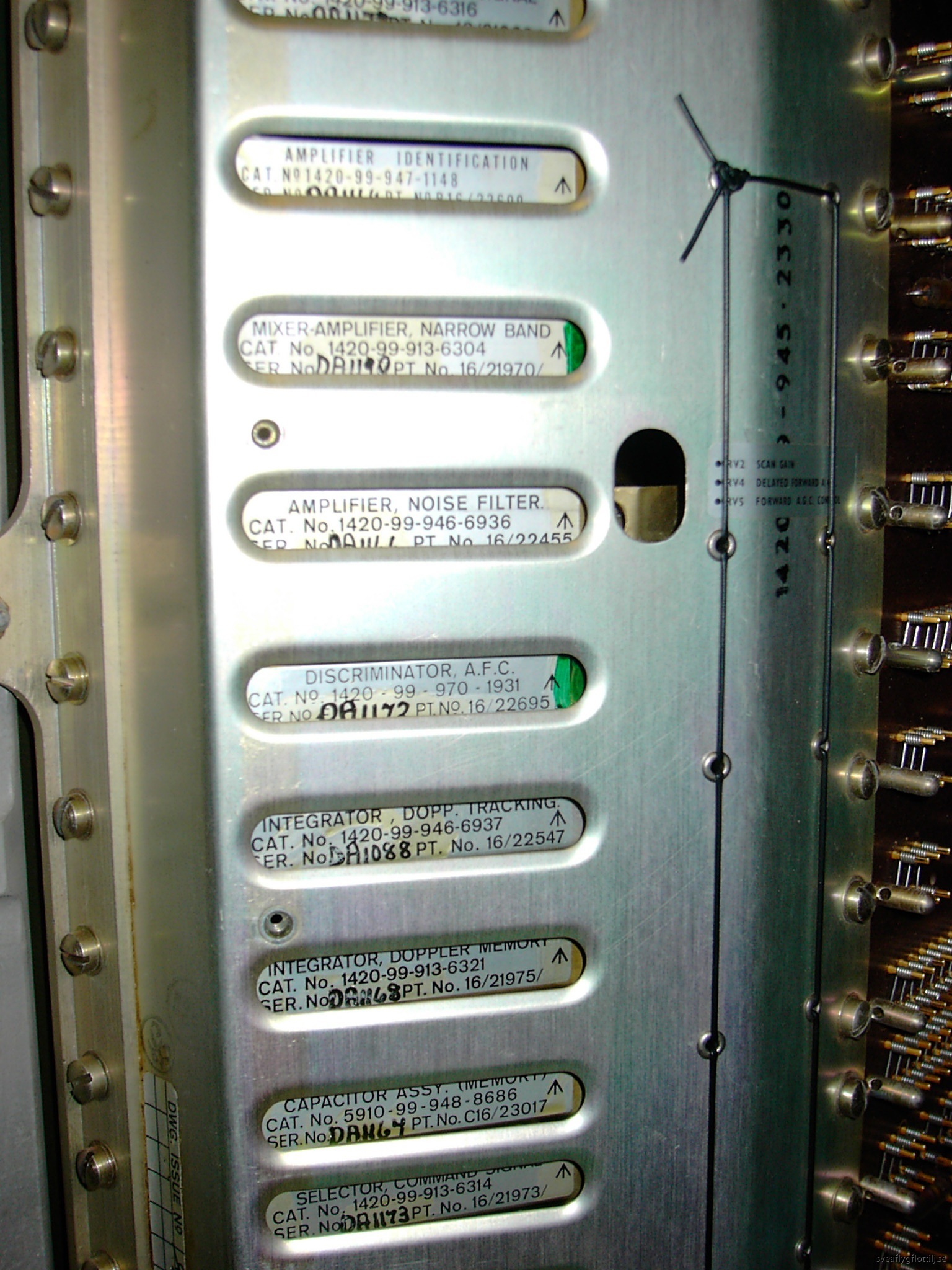
Närbild på målsökaren.
Bild via BMPG.

Kontroll av målsökarens kretskort på Telub.
Bild via Telubs veteranförening.
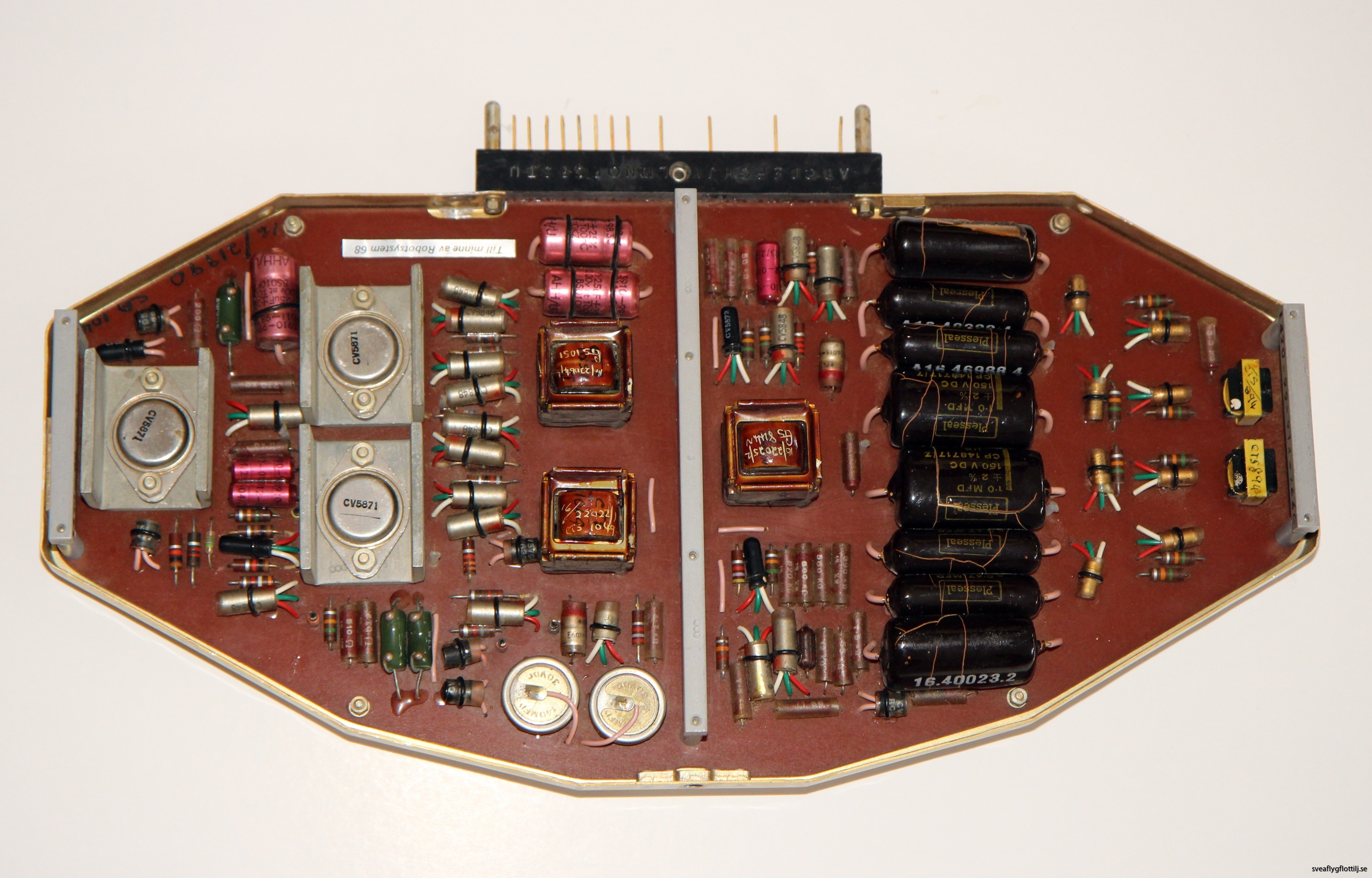
Kretskorten i målsökaren är formade efter robotkroppen. Foto: Håkan Wall.
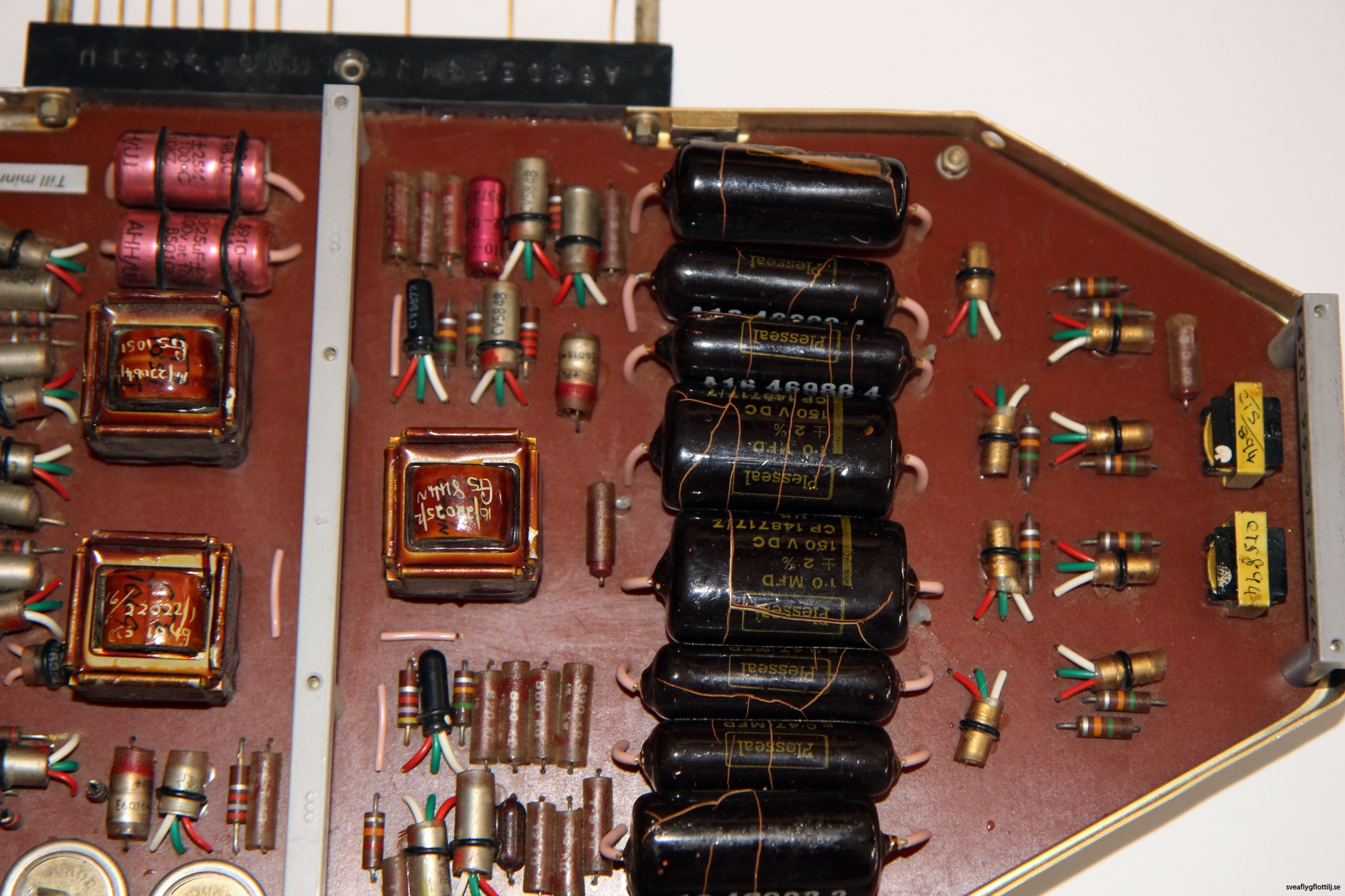
Kretskorten i målsökaren är formade efter robotkroppen. Foto: Håkan Wall.
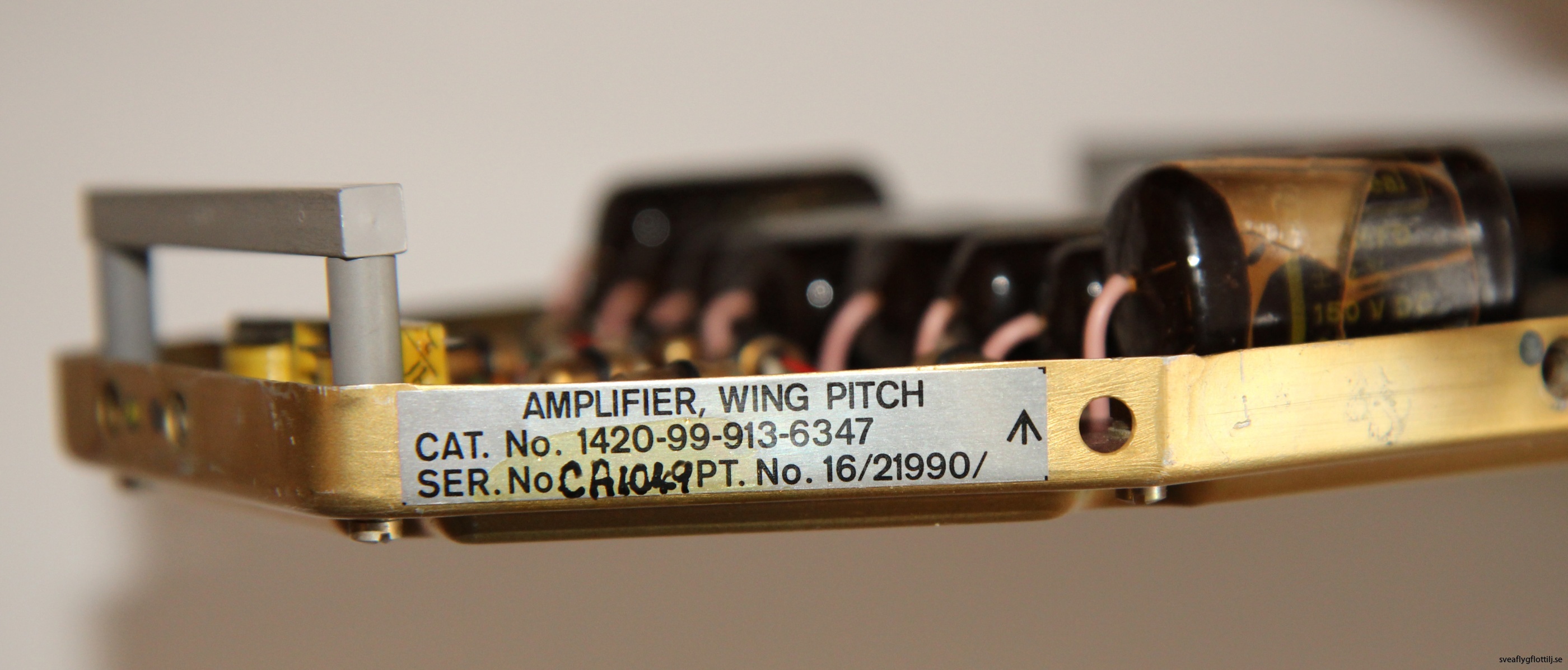
Ovan och till höger: kretskortets märkning.
Foto: Håkan Wall.