Robotplattor
Författat av Fredrik Lagerlöf.
Inom systemet användes i huvudsak två olika sorters robotplattor vid grupperingsplatserna, de åttkantiga robotplattorna som återfanns vid flottilj- och övningsgrupperingsplatserna samt den fyrkantiga som återfanns vid krigsgrupperingsplatserna.
De åttkantiga konstruerades efter brittiska ritningar medan de fyrkantiga är en svensk konstruktion. Både de åttkantiga och fyrkantiga robotplattorna fanns i ett flertal olika typkonstruktioner,och vilken typ av robotplatta som byggdes var beroende på förutsättningarna för anläggning på den aktuella platsen. På en och samma grupperingsplats kunde en eller flera olika typkonstruktioner användas.
Övningsgrupperingsplatser
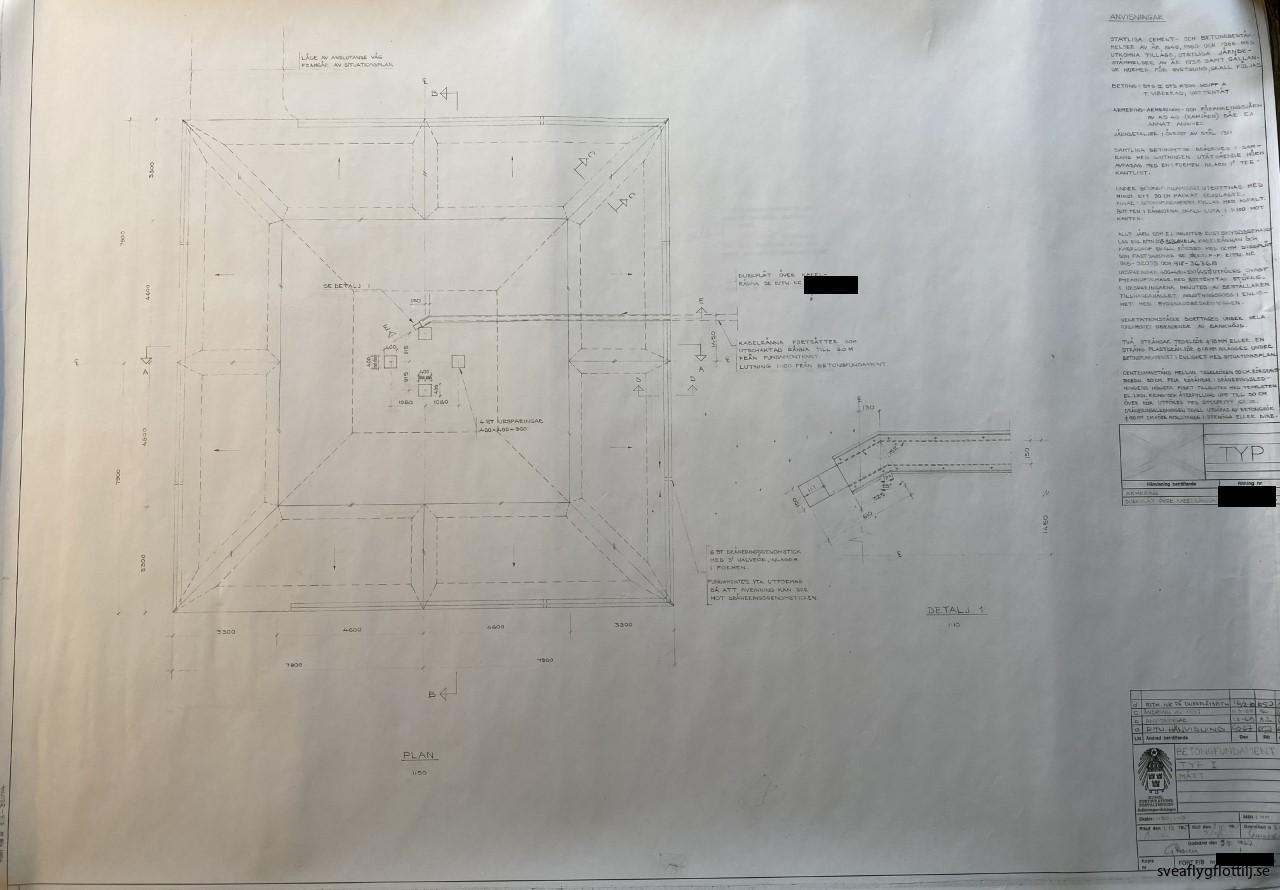
Åttkantig robotplatta av Typ 1. Användes enbart vid flottilj- och övningsgrupperingsplatser.
Källa: FortV.
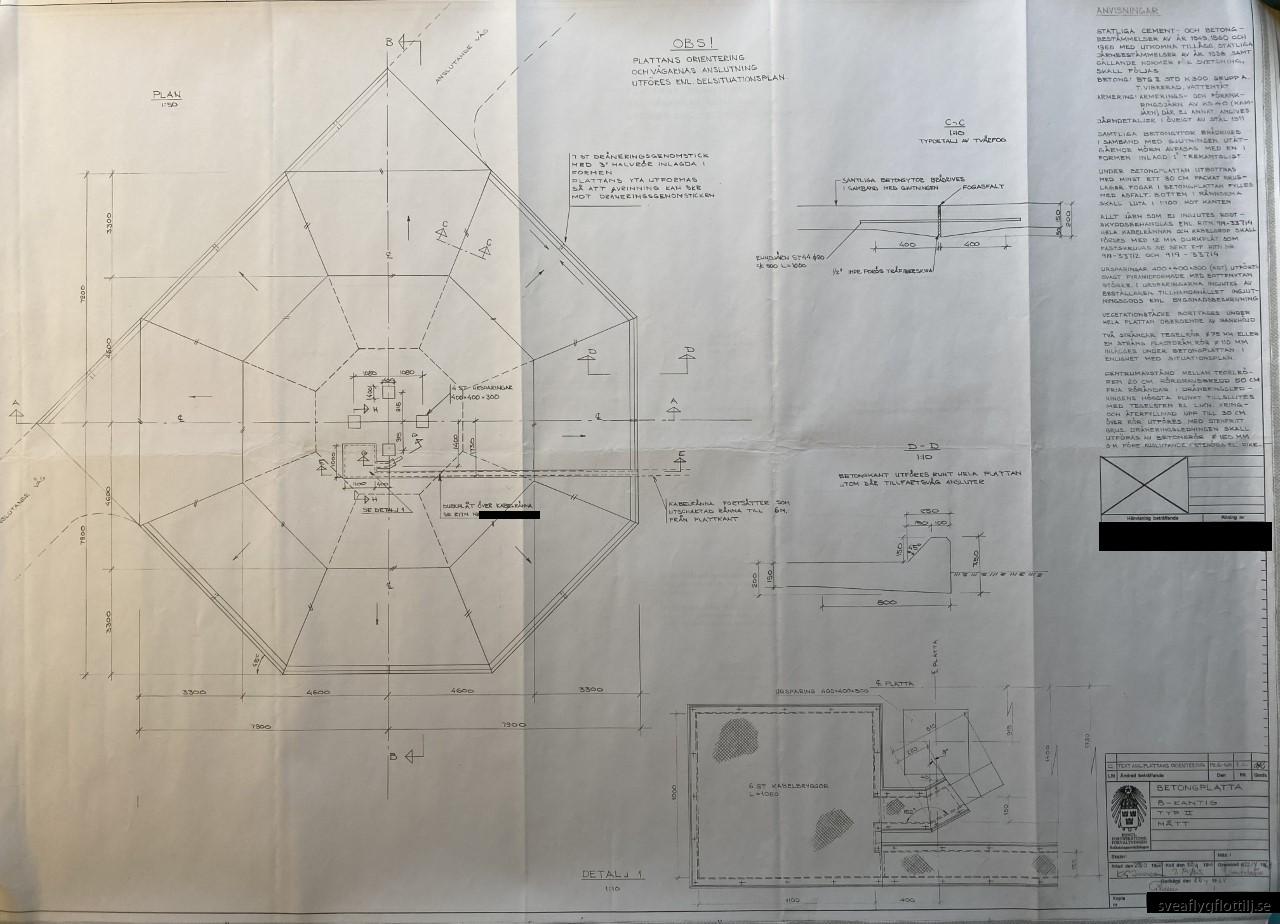
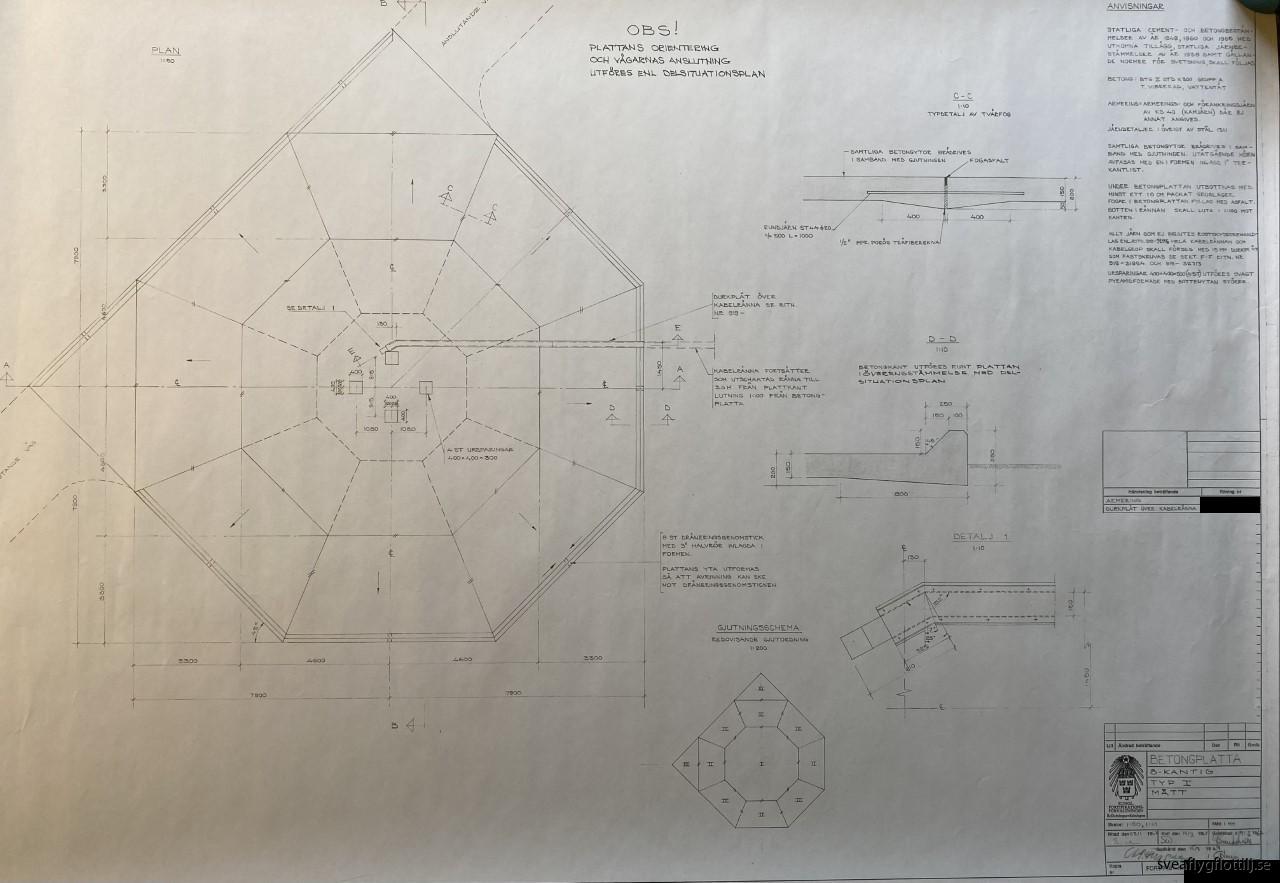
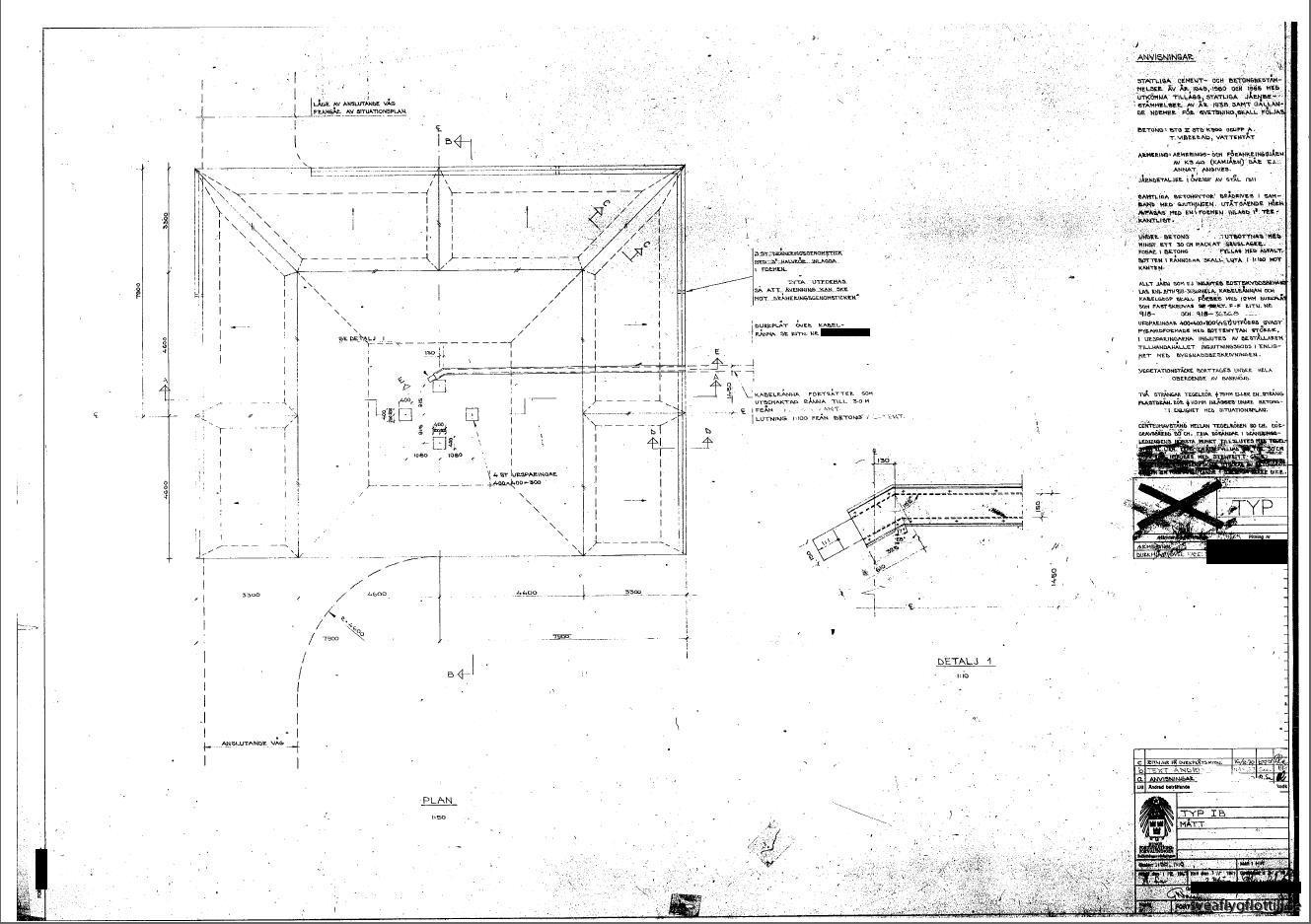
Åttkantig robotplatta av Typ 2. Den noterbara skillnaden här mot robotplatta Typ 1 är skillnaden på kabelgravens utformning.
Källa: FortV.

Två värnpliktiga soldater håller på och skruvar fast lavettfötterna i lavettfästet vid fredsgrupperingsplatsen på
F 8. Notera "specialverktyget" som används. Läs mer om detta verktyg under F 13 :85 Västra Ed.
Foto: Cleive Hornstrand.
Bilden till höger visar robotplatta 3 vid :85 Västra Ed under Rbbat F 13 sista övning våren 1977.
Robotplattan är av Typ1.
Notera förekomsten av granris till höger och vänster om roboten. Det är del av maskeringen av robotplattan som sopats bort. När övningen var klar lades maskeringen tillbaks tillsammans med nytt "färskt" granris.
Foto: Hans Fehrnström.

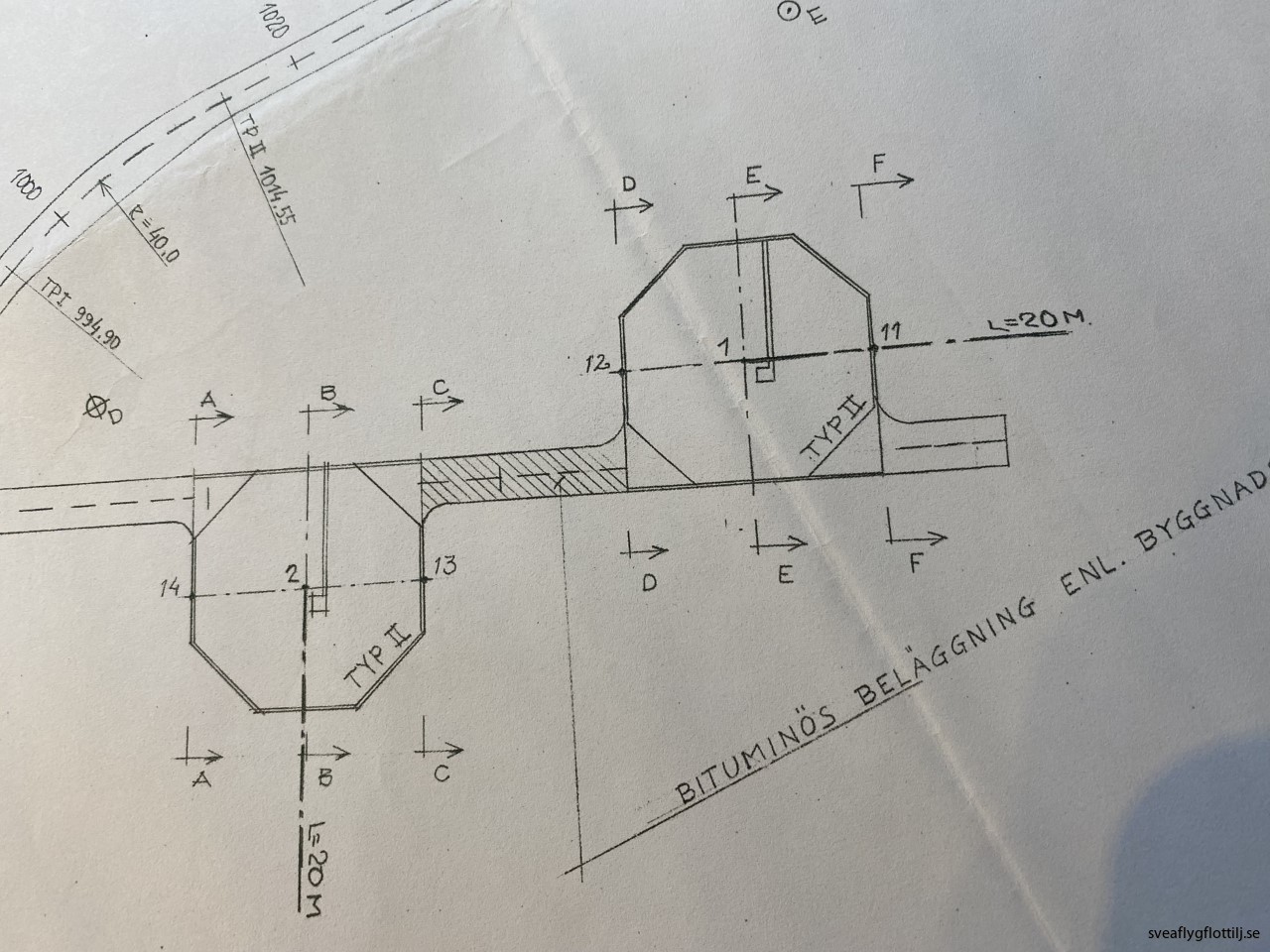
Detalj från delsituationsplanen för :85 Västra Ed visande robotplattor av Typ 2.
Källa: FortV.
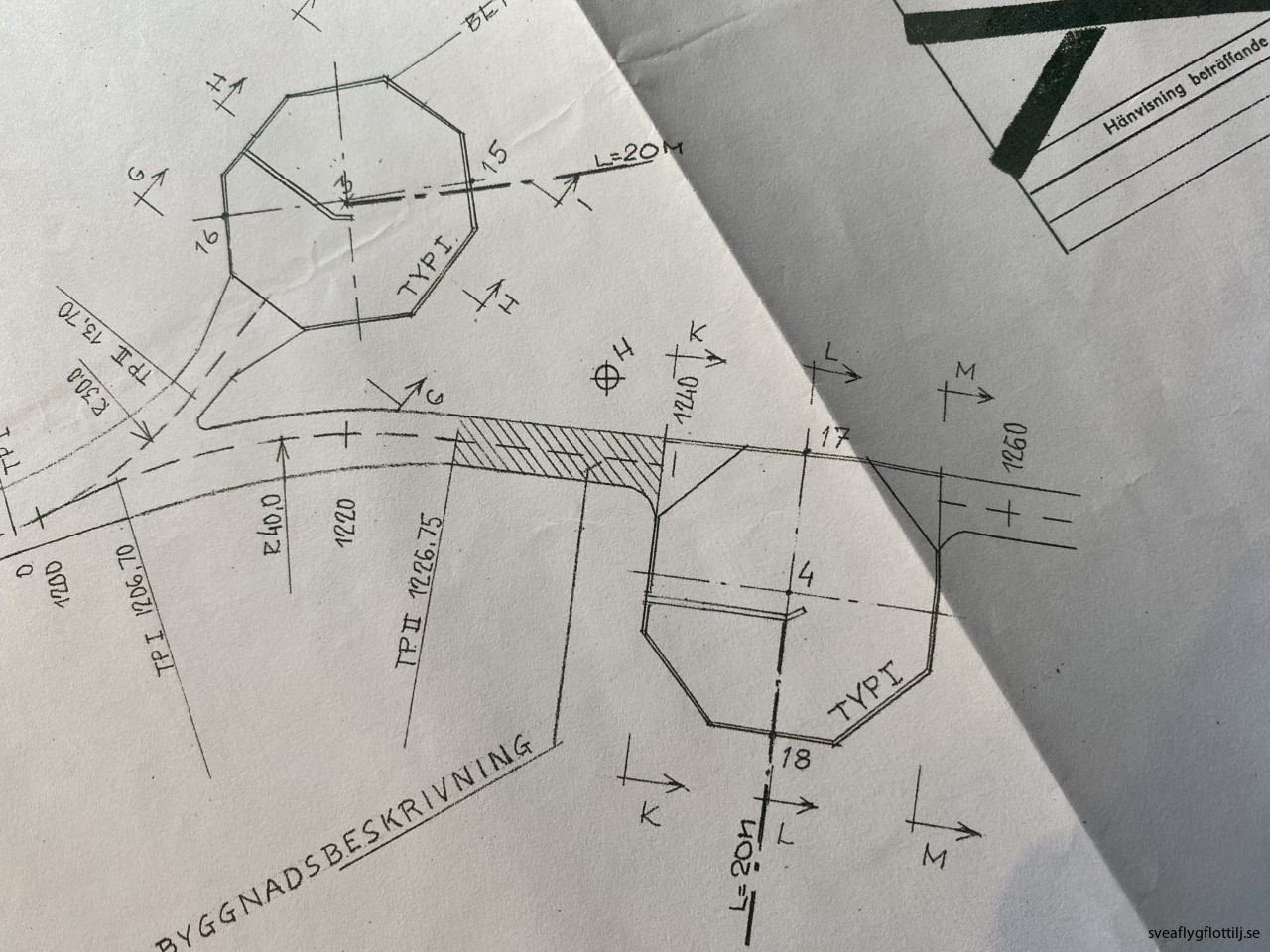
Detalj från delsituationsplanen för :85 Västra Ed visande robotplattor av Typ 1.
Källa: FortV.
Krigsgrupperingsplatser
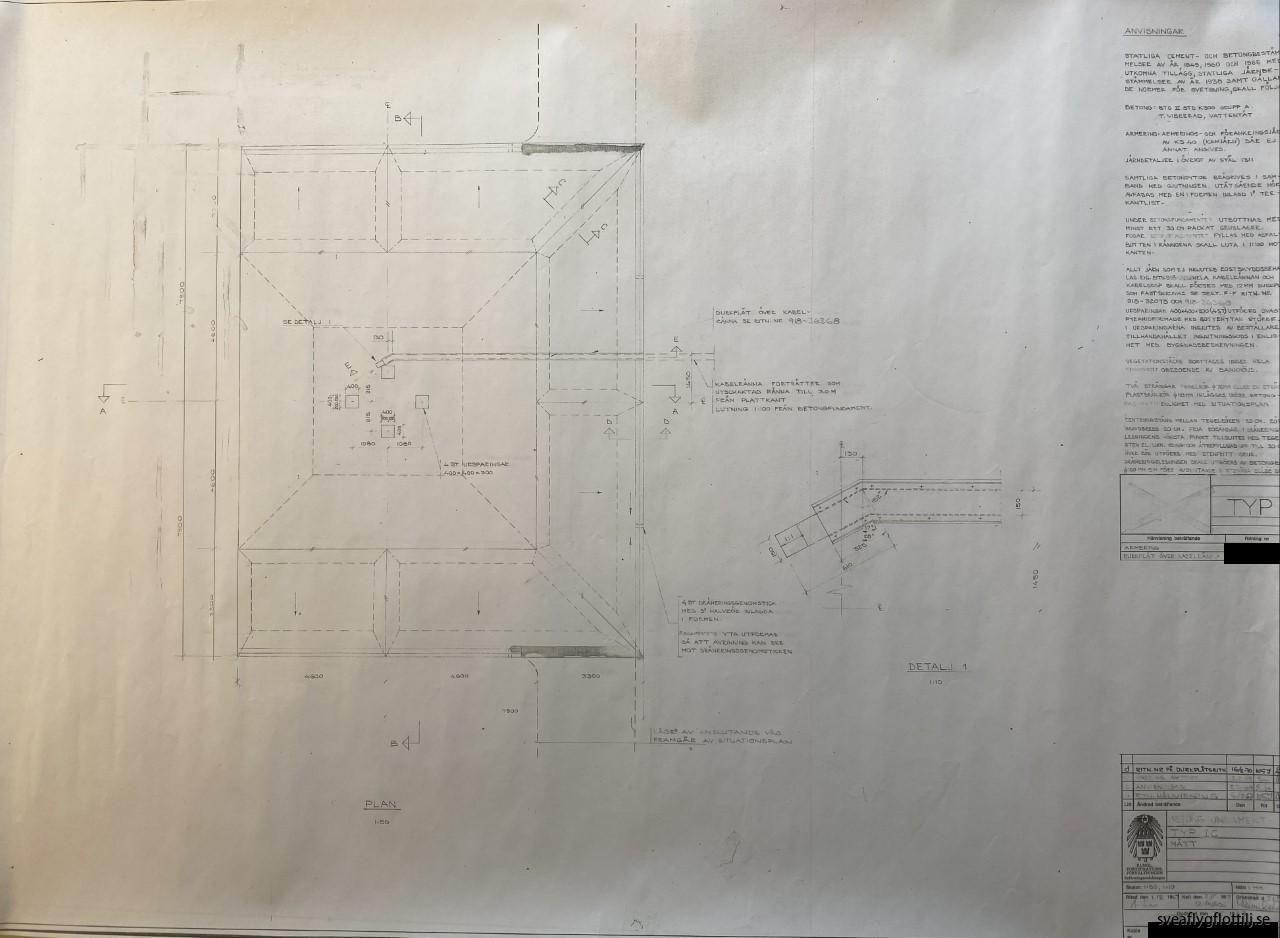
Robotplatta Typ 1 C avsedd för krigsgrupperingsplats.
Källa: FortV.
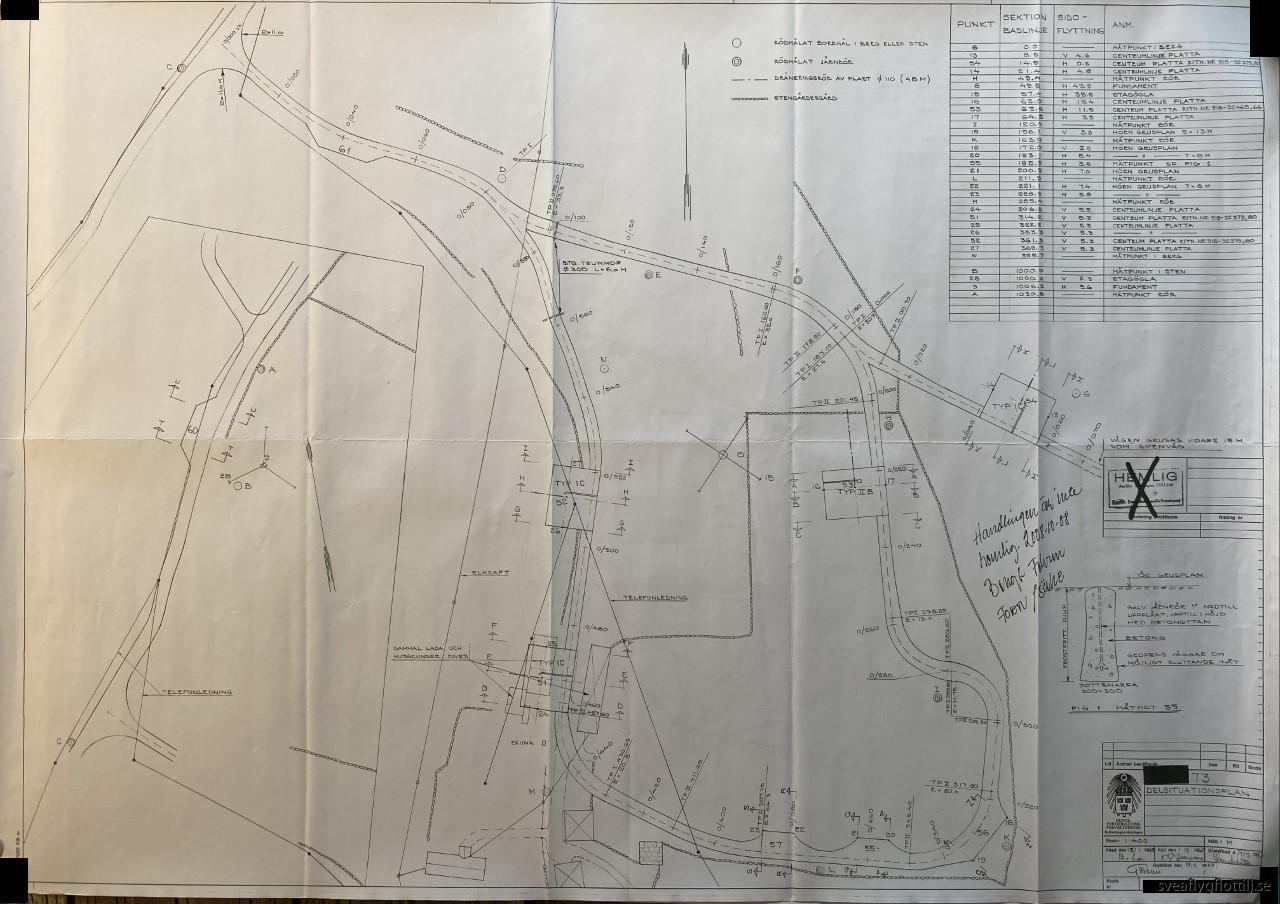
Delsituationsplan :73 Backaryd. Det var inte alls ovanligt att man använde flera olika typer av robotplatta inom en och samma grupperingsplats. Typen av robotplatta valdes utifrån ett flertal olika parametrar exempelvis robotplattans placering i förhållande till rbgc. Kabelgraven skulle alltid placeras så att kablarna kunde dras med så få "svängar" som möjligt mellan rbgc och robot, allt för att man skulle belasta kablarna så lite som möjligt. Även robotens primära skjutriktning i förhållande till rbgc hade inverkan på robotplattans typval, och då gällde det primärt kabelgravens utformning. Vid Backaryd användes två olika typer av robotplattor, Typ 1 C och Typ 2 B.
Källa: FortV.
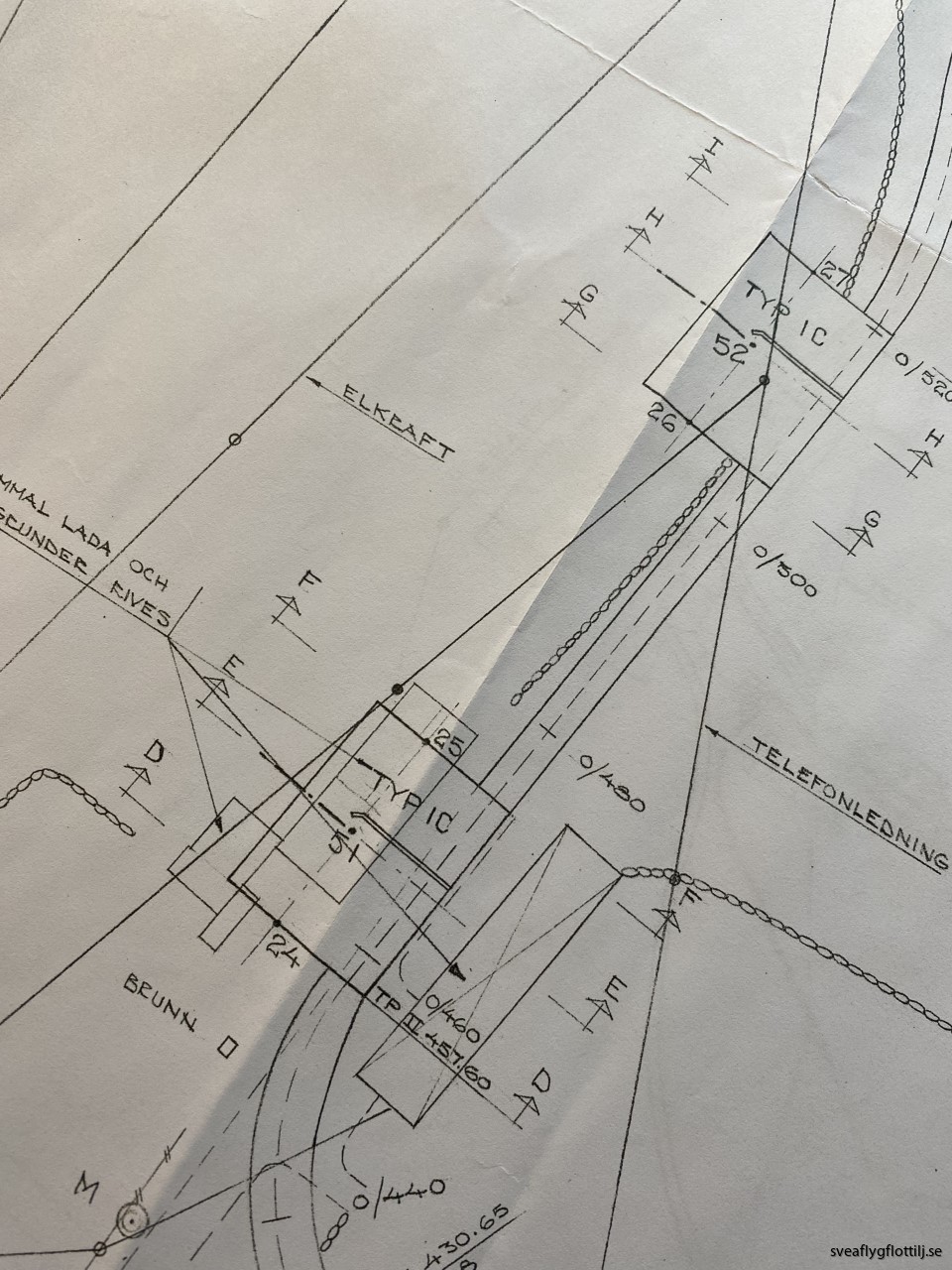
Detalj från delsituationsplanen för :73 Backaryd visande robotplattor av Typ 1 C.
Källa: FortV.
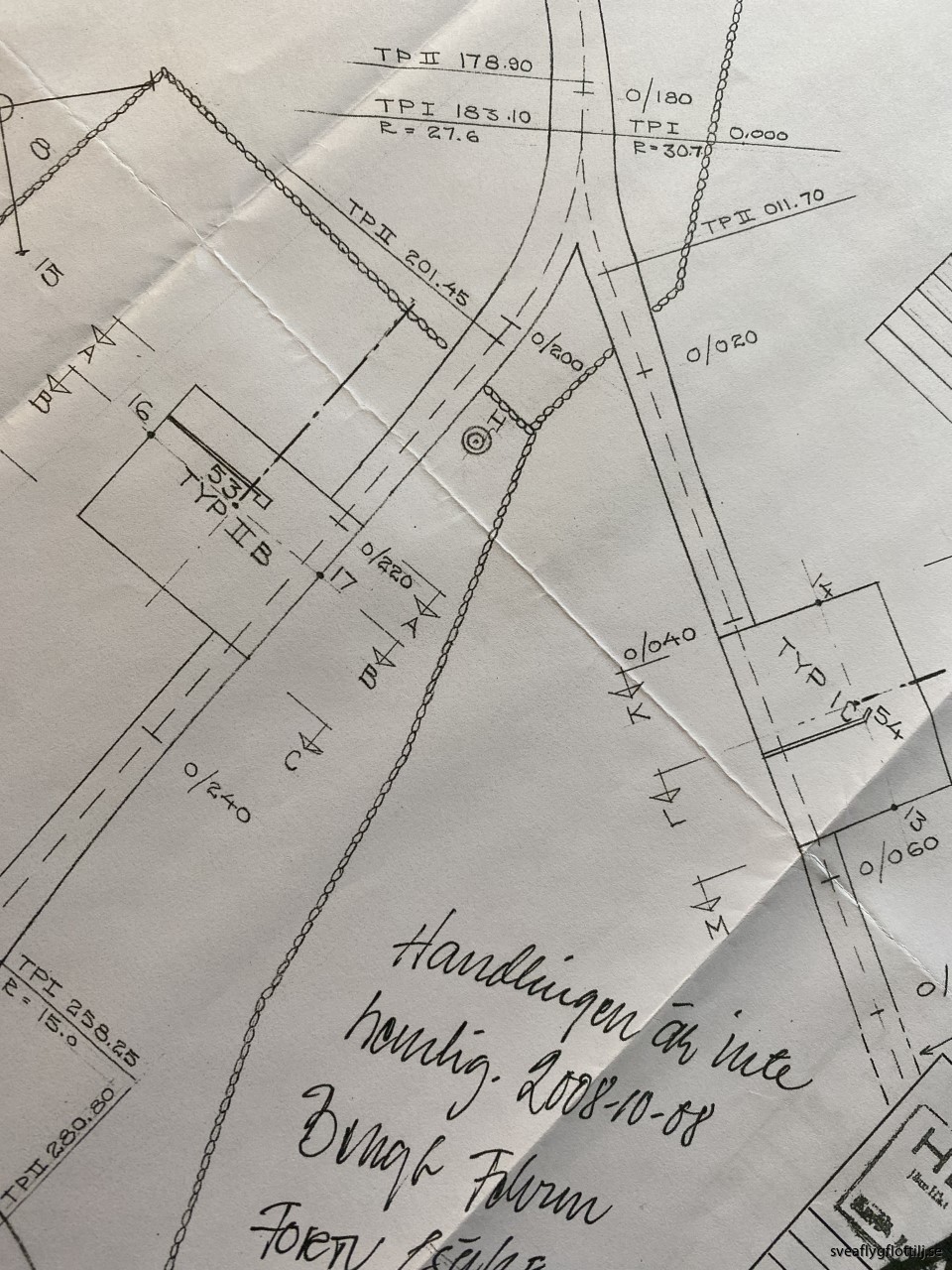
Detalj från delsituationsplanen för :73 Backaryd visande robotplattor av Typ 2 B.
Källa: FortV.
Robotplatta Typ 1 avsedd för krigsgrupperingsplats.
Källa: FortV.
Robotplatta Typ 1 B avsedd för krigsgrupperingsplats.
Källa: FortV.
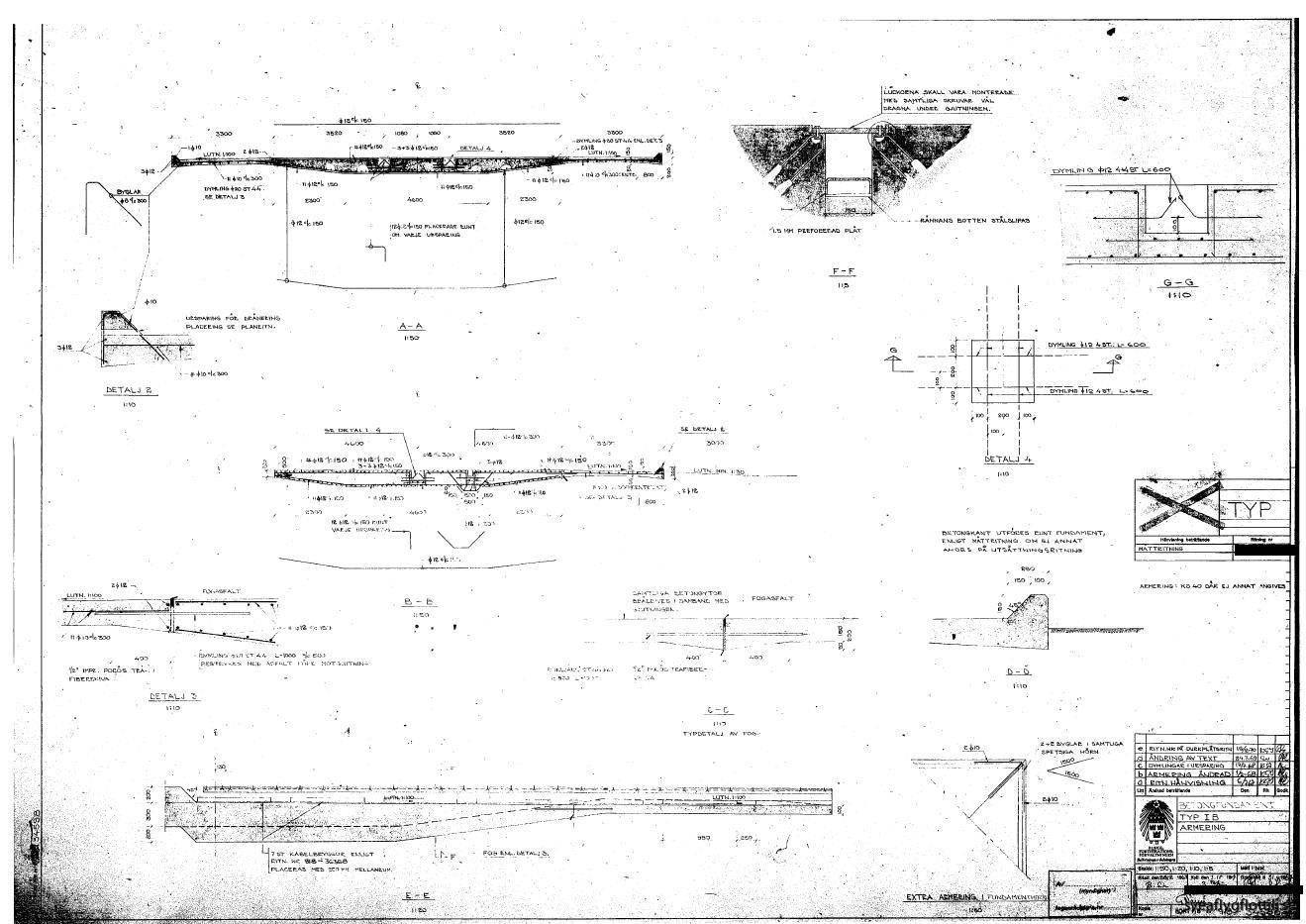
Armering, robotplatta Typ 1 B avsedd för krigsgrupperingsplats.
Källa: FortV.
Förstärkningsalternativen

Försöksverksamhet med den transportabla robotplatta. Platsen är antingen F 10 eller F14.
Foto: Okänt.
Under mitten av 60-talet påbörjas försöksverksamhet med en transportabel robotplatta i metall. Robotplattan, som var en engelsk konstruktion, var rund och skulle läggas ut enligt tårtbitsmodell. Tanken med denna transportabla robotplatta var bland annat att ytterligare minska risken för att krigsgrupperingsplatserna röjdes då det framöver inte skulle behöva gjutas några robotplattor i betong som skulle kunna avslöja vad det rörde sig om för plats.
Robotplattan skulle kompaniet ha med sig vid gruppering. En krigsgrupperingsplats skulle i och med detta bestå av en slinga innehållandes totalt sju grusade ytor med bärlager under varav fyra skulle vara runda till formen samt i närområdet, två gjutna mastfundament avsedda för simulatormast och radiolänkmast. De fyra runda ytorna var avsedda för att lägga ut den transportabla robotplattan på.
Den runda ytan skulle ha en diameter på 14 meter och vara uppbyggd enligt följande trelagerprincip; det första lagret, närmast marken, skulle bestå av ett 10–60 cm tjockt förstärkningslager.Därefter skulle man lägga på ett 10 cm tjockt bärlager för att sedan lägga på det sista lagret bestående av 15 cm makadam. Den runda ytan skulle ha ett lätt konkavt utseende och påminna om vad man skulle kunna likna med en mycket liten kulle. Kullen skulle sedan maskeras genom att man lade på ett cirka 10 cm tjockt lager jord som man toppade med gräsfrö. Med tiden skulle den runda ytan bli gräsbeklädd och man räknande även med att ett visst mått av naturlig vegetation skulle växa upp i form av mindre buskar och liknande växtlighet. Platsen skulle, om allt gick som planerat, se helt naturlig ut.
Ursprungligen var det tänkt att de krigsgrupperingsplatser som skulle tillhöra förstärkningsalternativen skulle anläggas på samma sätt som de övriga krigsgrupperingsplatserna, d.v.s. med fyrkantiga robotplattor i betong men under den senare delen av 60-talet övergår man till att planera och rekognoscera för krigsgrupperingsplatser där man avser att använda systemet med de transportabla robotplattorna.
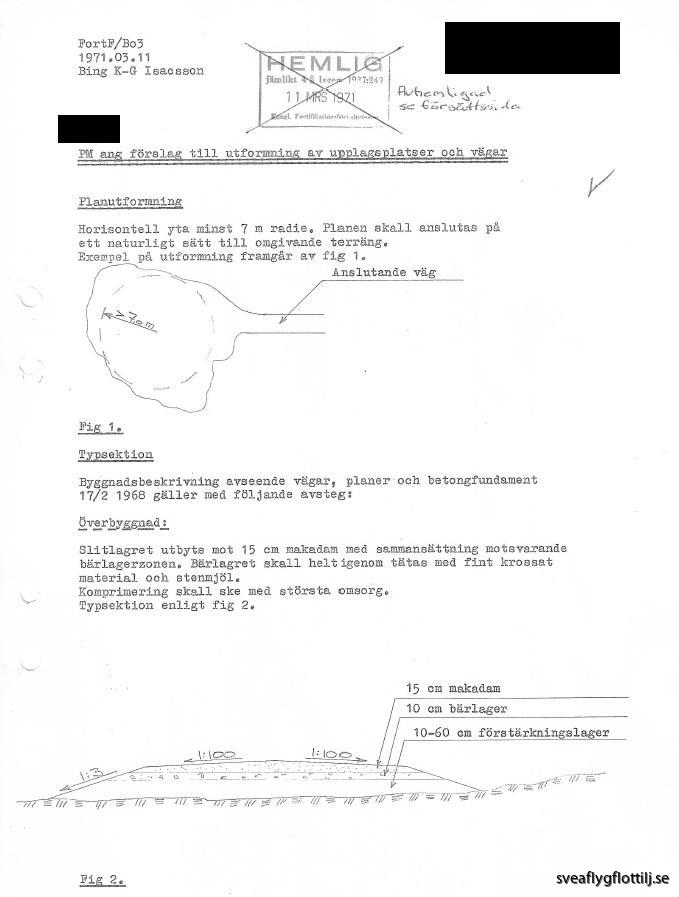
Principskiss för uppbyggnad av den hårdgjorda yta på vilken man skulle placera den transportabla robot-plattan.
Källa: FortV.

Så här skulle det sett ut även i Sverige om arbetet hade fått fortgå. Bilden är tagen utanför RAF Mseum London.
Foto: Okänt.
Robotplattans olika delar
Robotplattornas mått var 15,8x15,8m. Robotplattorna på krigsgrupperingsplatsern samt freds- och övnningsgrupperingsplatserna hade samma yttermått även om de sistnämnda saknade raka hörn vilket gav dem dess särskilda utseende. Kabelgraven mätte 7,9 meter. Robotplattans tjocklek varierade relativt kraftigt beroende på vilken del av plattan man avser. De yttre delarna av robotplattan mätte 25 centimeter, sargen 35 cm och robotplattans plattans centrum, det vill säga det område där själva roboten skulle stå, mätte hela 60 cm.
Nedan kommer vi nu att visa ett flertal olika delar av en robotplatta, delarna är gemensamma för alla typer av robotplattor.

Kabelgraven mätte 7,9 meter från inloppet vid robotplattans mitt till utloppet vid robotplattans slut.
Plats :59 Sadelmakartorp.
Foto: Håkan Wall.

Kabelgravens inlopp samt jordningsvajer. Jordningsvajern löpte jämte kablar genom hela kabelgraven och ut i naturen på andra sidan.
Plats :150 Österlövsta.
Foto: Håkan Wall

För att förhindra att jord, löv och annat skräp föll ner i kabelgraven täcktes inloppet med en enkel metallplatta med en träkloss under.
Plats :91 Kvarsebo.
Foto: Håkan Wall.

Kabelgrav i näst intill sin fulla längd. I botten syns ett par små metallbitar med hål i. Dessa är nätrister i perforerad plåt och de löpte längs med hela botten på kabelgraven. Deras funktion var att hålla upp kablarna från botten så de inte skulle bli liggandes i vatten vid exemplevis regn eller töväder. Vatten fick således fri passage ner i botten på gabelgraven och vidare till avrinningskanalen.
Plats F 8 fredsgrupperingsplats.
Foto: Fredrik Lagerlöf.

Kabelgravens utlopp. Även här syns ett par av de nätrister som låg i botten på kabelgraven.
Plats :150 Österlövsta.
Foto: Fredrik Lagerlöf.

Sargen kan förekomma vid en, två eller tre kanter på robotplattorna och hur många sarger en robotplatta hade avgjordes av i de skjutriktningar roboten hade. Sargen eller sargerna var alltid placerade så att de skulle hamna bakom en grupperad robot, dvs i motsatt riktning till skjutriktningen. Sargens funktion var att reflektera raketstrålen från startmotorerna uppåt och på så sätt minska risken för skogsbrand i den bakomliggande vegetationen. Dessa sarger var inte något som bara hörde krigsgrupperingsplatserna till, de fanns även vid fredsgrupperingsplatserna och övningsgrupperingsplatserna (undantaget :1 Everöd) eftersom man i händelse av krig även skulle kunna nyttja dessa operativt om så krävdes.
Plats :59 Sadelmakartorp.
Foto: Håkan Wall.

Om kabelgraven löpte i riktining mot en sarg löstes detta genom att göra en liten öppning för kabelgravens utlopp.
Plats :61 Söndraby.
Foto: Håkan Wall.

Täcklock för öppningen i sargen
Plats :59 Sadelmakartorp.
Foto: Fredrik Lagerlöf.

Plats :32 Söderlövsta.
Foto: Fredrik Lagerlöf.

Här framgår robotplatts tjocklek på ett tydligt sätt.
Plats :74 Kiaby.
Foto: Håkan Wall.
Den stora kabelluckan
På vissa robotplattor påbörjas kabelgraven med en större plåtlucka. Förekomsten av den stora kabelluckan är avhängd av i vilken riktning roboten har sin primära skjutrikting, och då framförallt hur robotens lavett står placerad i förhållande till rbgc. Om lavetten står med sin baksida i riktning mot rbgc dras kablarna rakt ner i kabelgraven och i fortsatt riktning mot rbgc, men om lavettens baksida står i riktning ifrån rbgc måste kablarna läggas i en "ögla" nere i den stora kabelluckan, för att "vändas" i rätt rikning, för att sedan kunna dras vidare mot rbgc i vanlig ordning. För att "öglan" skulle få plats behövdes det ett större utrymme nere i kabelgraven och därav uppkomsten av den större kabelluckan.

Robotplatta 1, :83 Mogetorp. Här ser man tydligt den stora kabelluckan. Vi kan alltså konstatera, med ovanstående beskriving om placering, att robotens primära skjutrikting från denna robotplatta - hade varit ungefär i riktning mot bildens högra övre hörn.
Foto: Håkan Wall
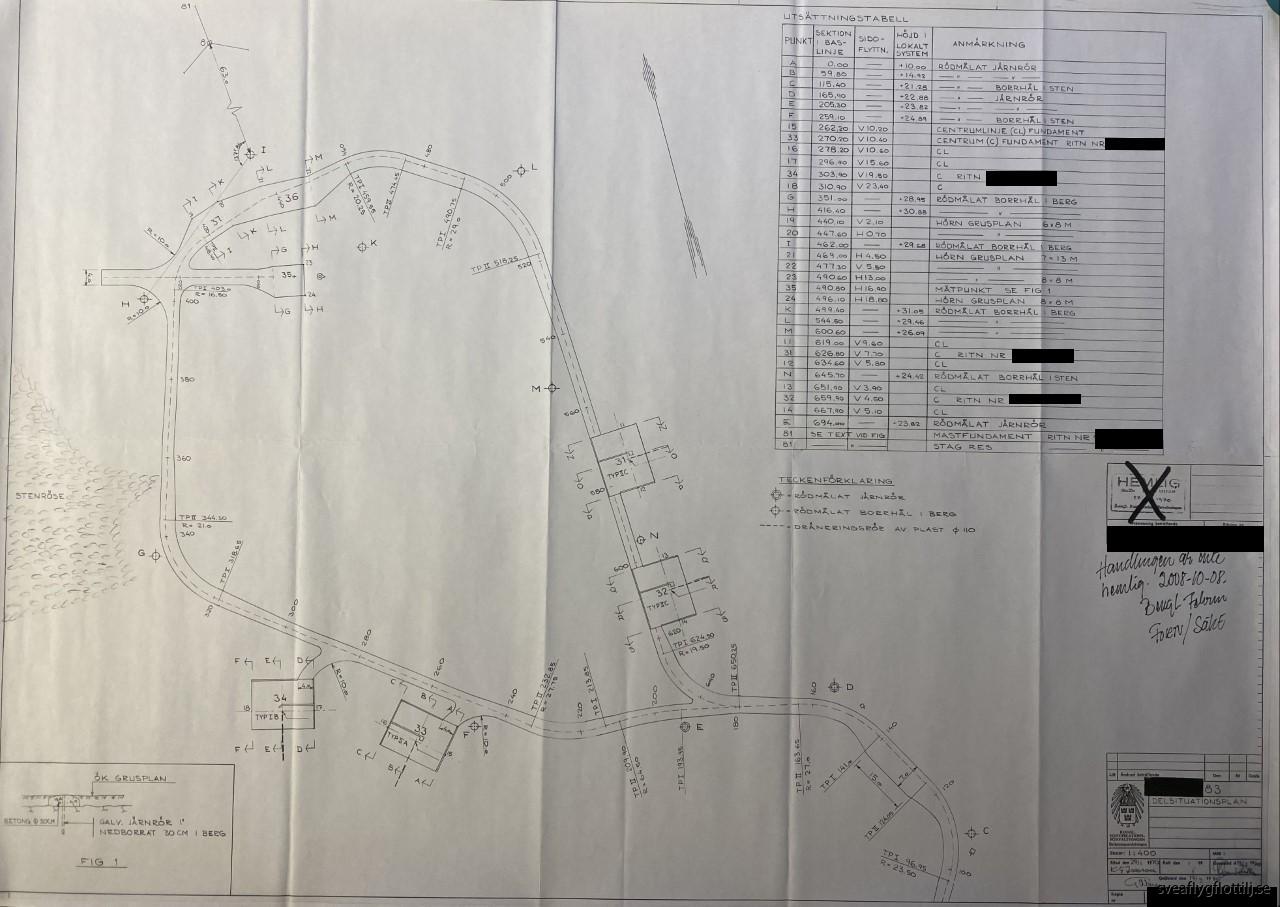
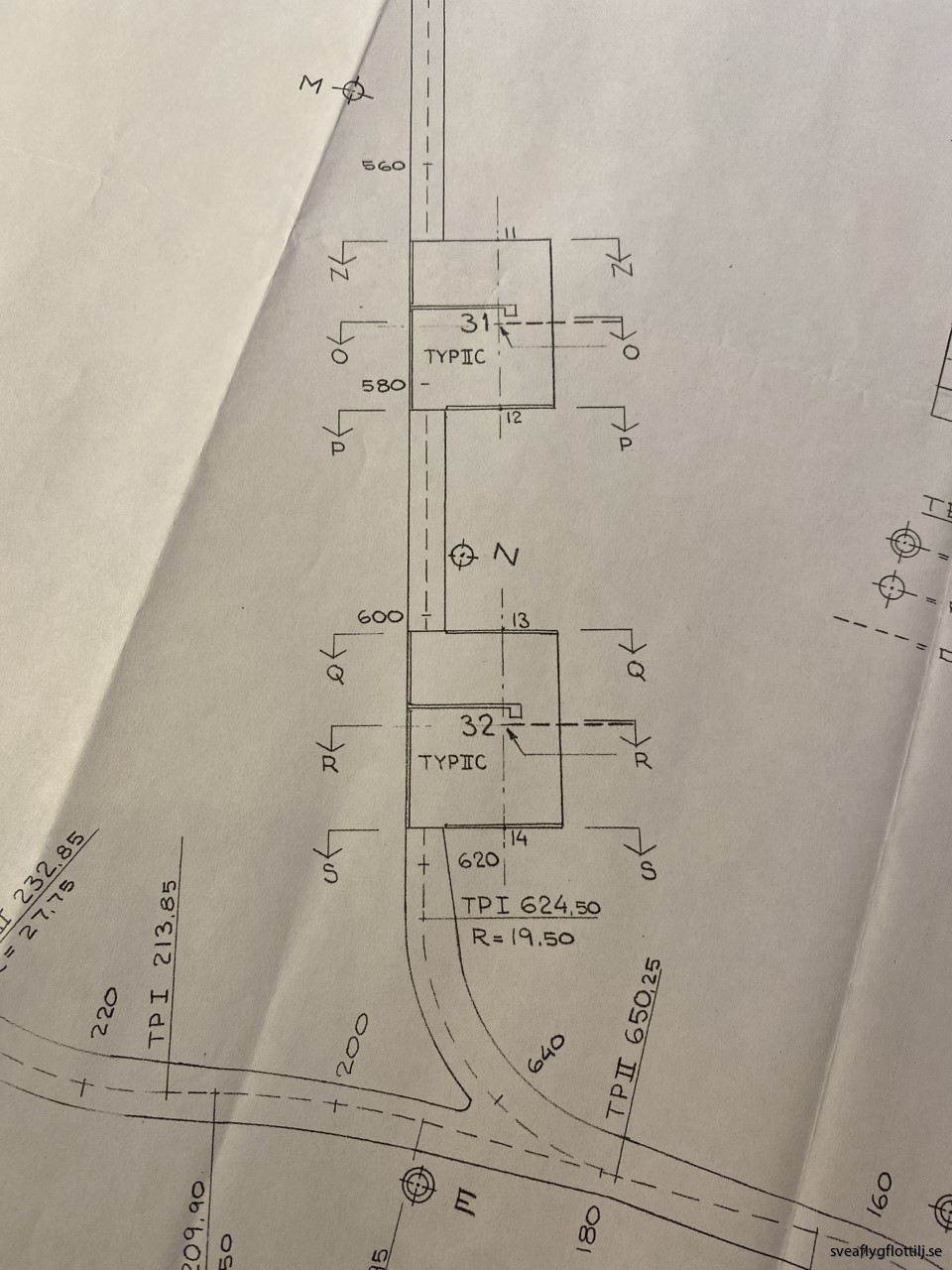
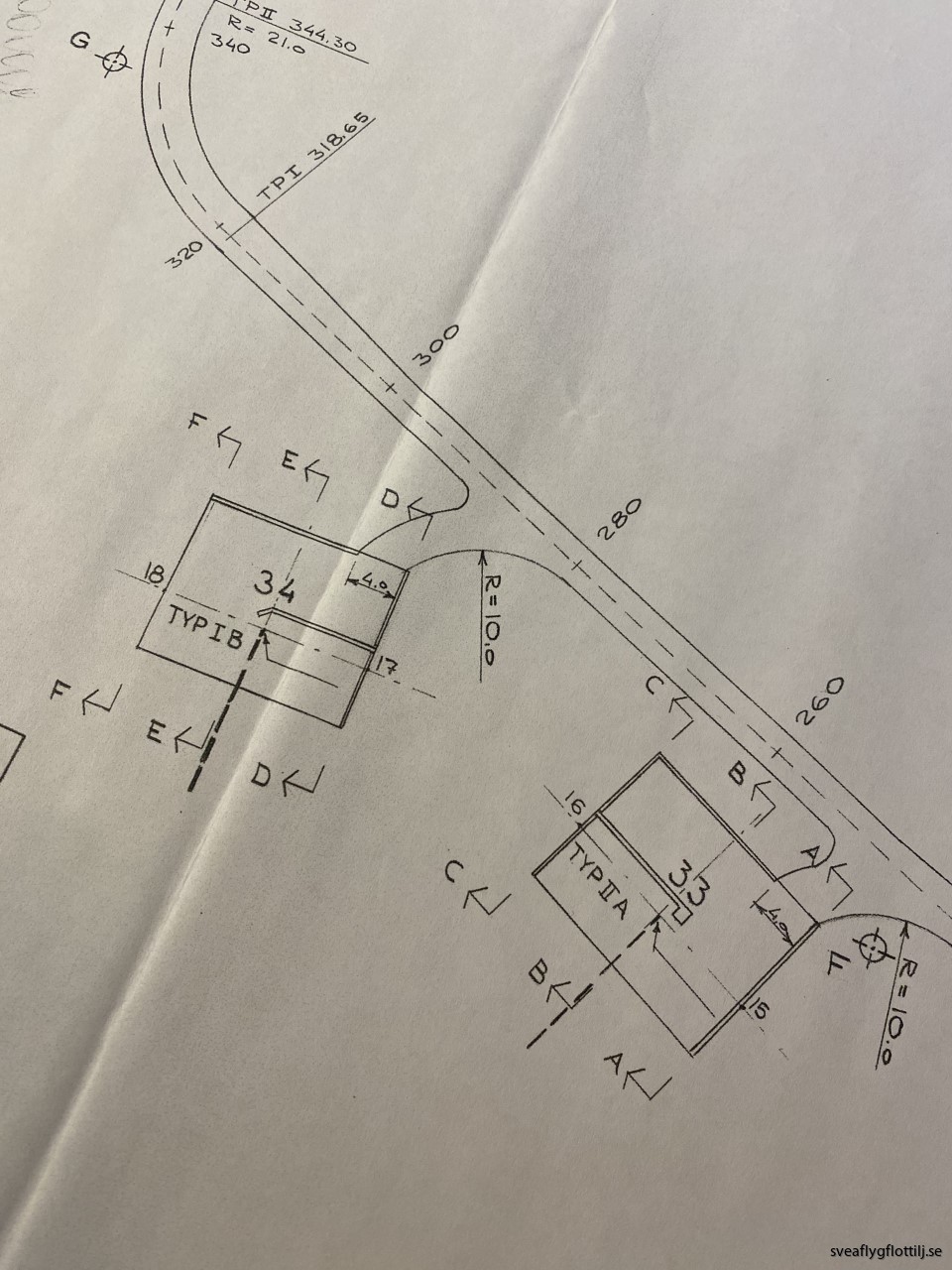
Delsituationsplan för :83 Mogetorp. Här ser vi att tre av fyra robotplattor anläggs med den stora kabelluckan.
Källa: FortV.
Robotplatta 1 och 2, :83 Mogetorp.
Källa: FortV.
Robotplatta 3 och 4, :83 Mogetorp.
Källa: FortV.

Robotplatta 4, :83 Mogetorp - den enda av de fyra robotplattorna som saknar stor kabellucka.
Foto: Håkan Wall.

Närbild på en stor kabellucka, dessutom komplett med sina tre reglar.
Plats :45 Dörröd.
Foto: Håkan Wall.

Ett komplett "kilförband". Regeln sköts genom de två öglorna och de två kilarna sköts därefter in mellan regeln och locket till kabelgraven. Kilarna hamrades in ytterligare med en gummiklubba tills de satt hårt på plats. Det var viktigt att kilarnas bakdel, dvs den tjockare delen var vända i riktning mot roboten eftersom de annrs skulle kunna flyga iväg av kraften från jetstrålen.
Plats :83 Mogetorp.
Foto: Håkan Wall.