Skenmålsgrupp & skenmålsrobotar

Skenmålsrobotar uppställda i fält.
Foto: F 10 Kamratförening.
Författat av Håkan Wall.
Under sent 60-tal tillkom en skenmålsgrupp i varje krigskompani. Gruppen bestod av en chef, fyra vpl bilförare och sex vpl robottekniker. De fick samma utbildning som övriga soldater och kunde därför förstärka den ordinarie organisationen vid behov.
Skenmålsgruppen rekognoserade platser i närheten av samtliga krigsgrupperingsplatser, de hade egna fordon, bl.a. några utrangerade bussar i lämplig storlek för att simulera rbgc och brr.
Försöksverksamheten för detta gjordes på F 14 i Halmstad i ett tidigt skede. Det lär även ha testats med uppblåsbara robotar men de tappade luft ganska snart.
Taktiken för skenmål kunde vara olika. Ett scenario är att man reser skenmålet i närheten av den skarpa grupperingen för att dra blickar till sig, ett annat är att man vid omgruppering ställer upp skenmålen på den plats man lämnar för att ge sken av att man är kvar där.
Det var förbandet själva som fick tillverka skenmålen. På grund av detta såg de olika ut på de olika förbanden. På F 10 byggde man robot av plaströr och trä medan de på F 13 var byggd av plåt och trä, lavetter var även de av tunn plåt eller trä. Som kablar kunde man använda plastrep och byggplast fick bli kabelgravar. På F 17 minns Åke Olsson att de inte byggde skenmålen själva utan att han hämtade dessa i Halmstad.
Det finns en historia om just skenmål som cirkulerar bland de som var med på den här tiden, beroende på vem man pratar med så stämmer inte riktigt de olika versionerna överens. Nedan följer de delar som de flesta verkar vara överens om.
Tidpunkten ska vara tidigt 70-tal och platsen :76 Bräkne-Hoby. Ett robotförband är grupperat på övningsplatsen och maskering utförd. Strax intill har skenmålsgruppen grupperat. Sedan går uppgifterna isär om skenmålen är omaskerade eller dåligt maskerade. Hur som helst är ett attackförband engagerade för utföra ett anfall. Innan start är piloterna informerade om var deras mål är lokaliserat, förbandet kommer inflygande på låg höjd, stiger snabbt, gör en roll och lägger planet på rygg för att få en snabb överblick över terrängen och lokalisera målet. Piloten har en mycket kort tid på sig att bestämma var han ska sätta in sitt anfall. Han anfaller det han ser. Attacken genomförs och glada piloter återvänder till basen efter ett väl genomfört uppdrag. Som alla säkert har gissat så har samtliga anfall gjorts mot skenmålsgruppen.

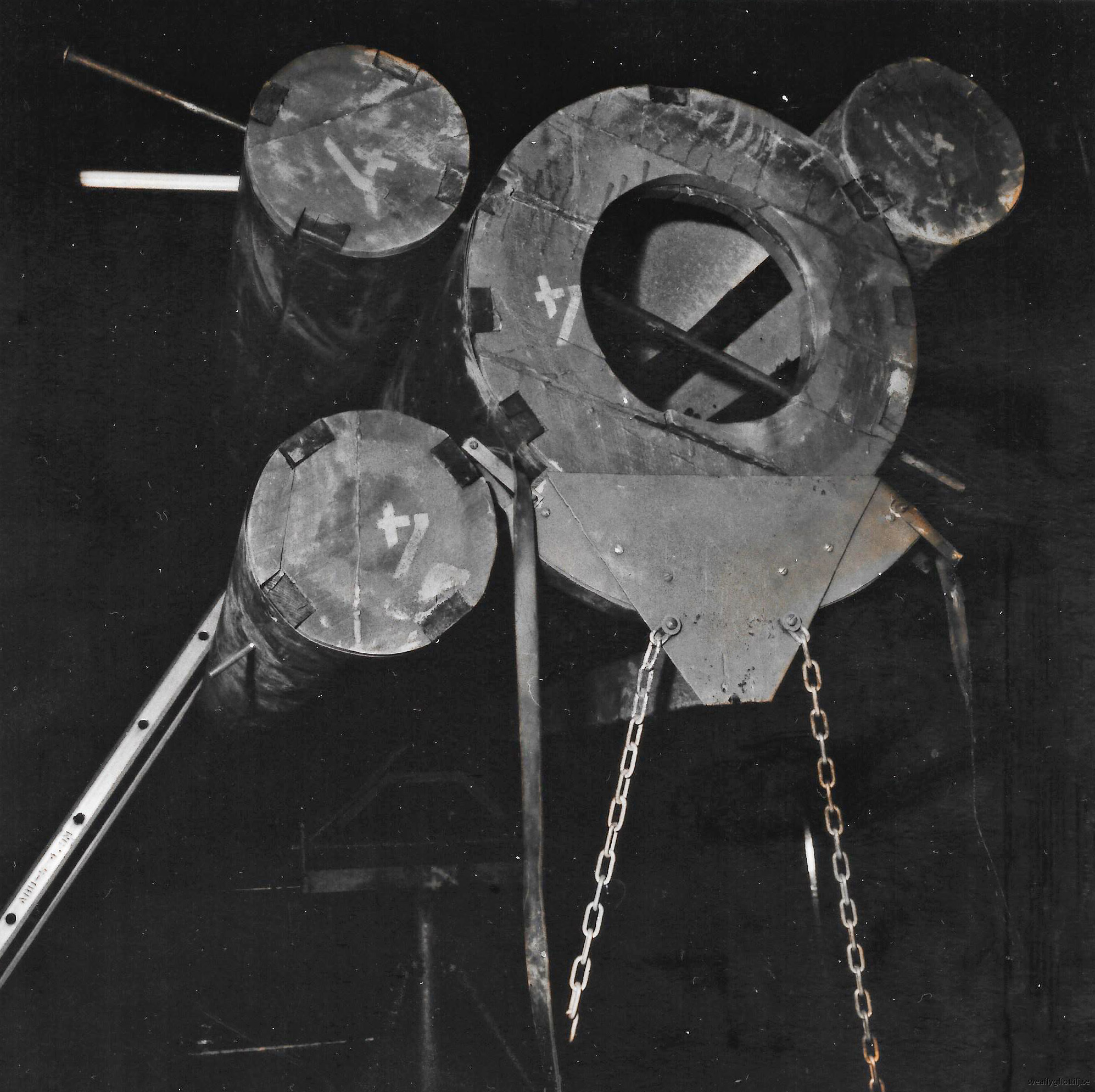
Skenmålsrobot, troligen från försöken på F 14.
Foto via Arboga robotmuseum.

Skenmålsrobot, troligen från försöken på F 14.
Foto via Arboga robotmuseum.

Skenmålsrobot, troligen från försöken på F 14.
Foto via Arboga robotmuseum.

Skenmål ute i terrängen. På detta något suddiga foto ser man att robotarna förankrades med vajrar, annars hade de troligen blåst omkull. Foto: Göran Svensson, F 10.
Vi har fått tag på material som nu gör det möjligt att följa arbetet med skenmålen på F 10. Instruktioner kom ”uppifrån” och det var bara för robotförbanden att följa dessa.
Samtliga bilder nedan, där inte annat anges, har vi fått av Göran Brauer, F 10.
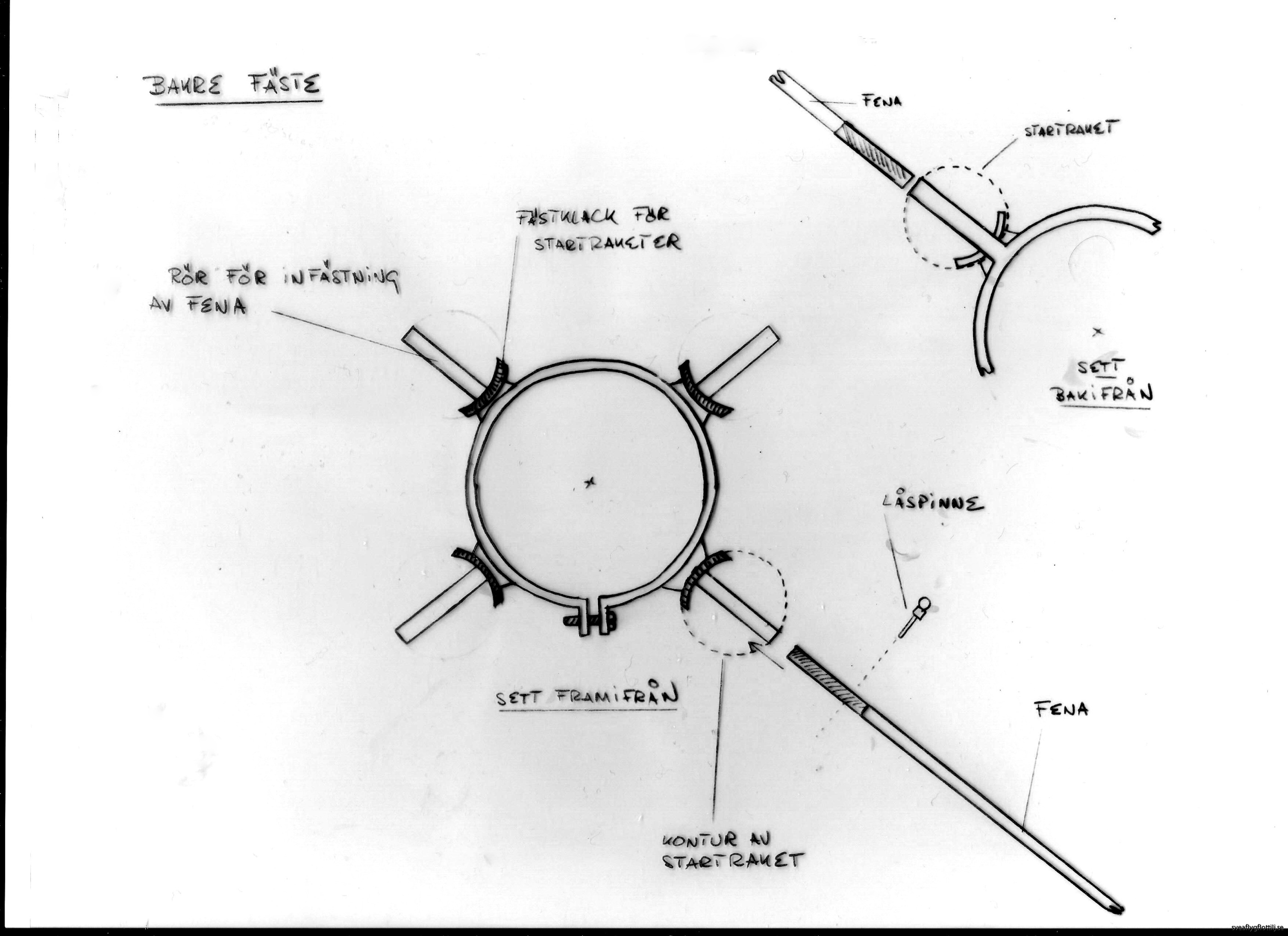
Givetvis behövs ritningar.
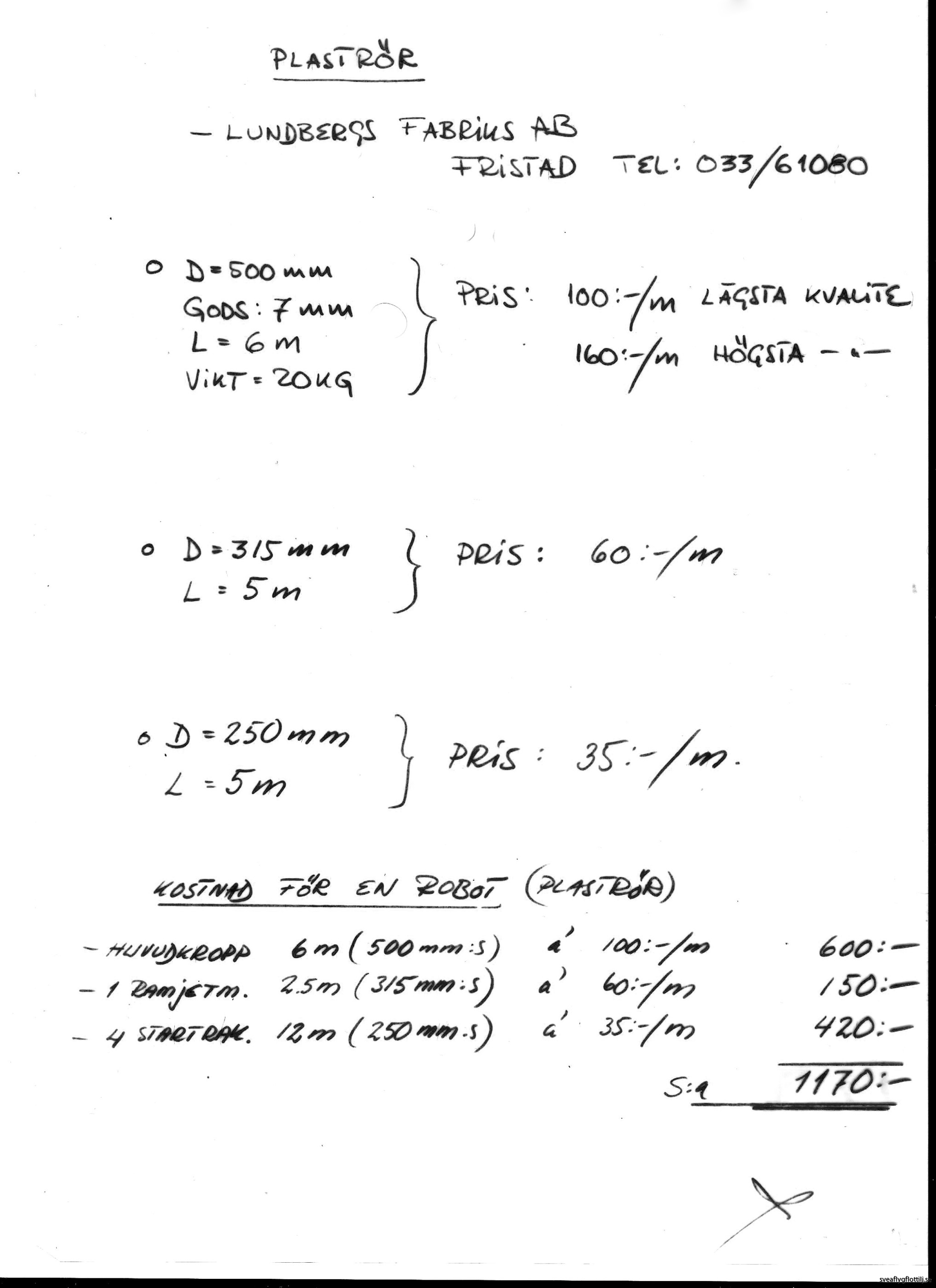
Att ta in offert på material är en god idé.
Sedan är det dags att börja bygga................
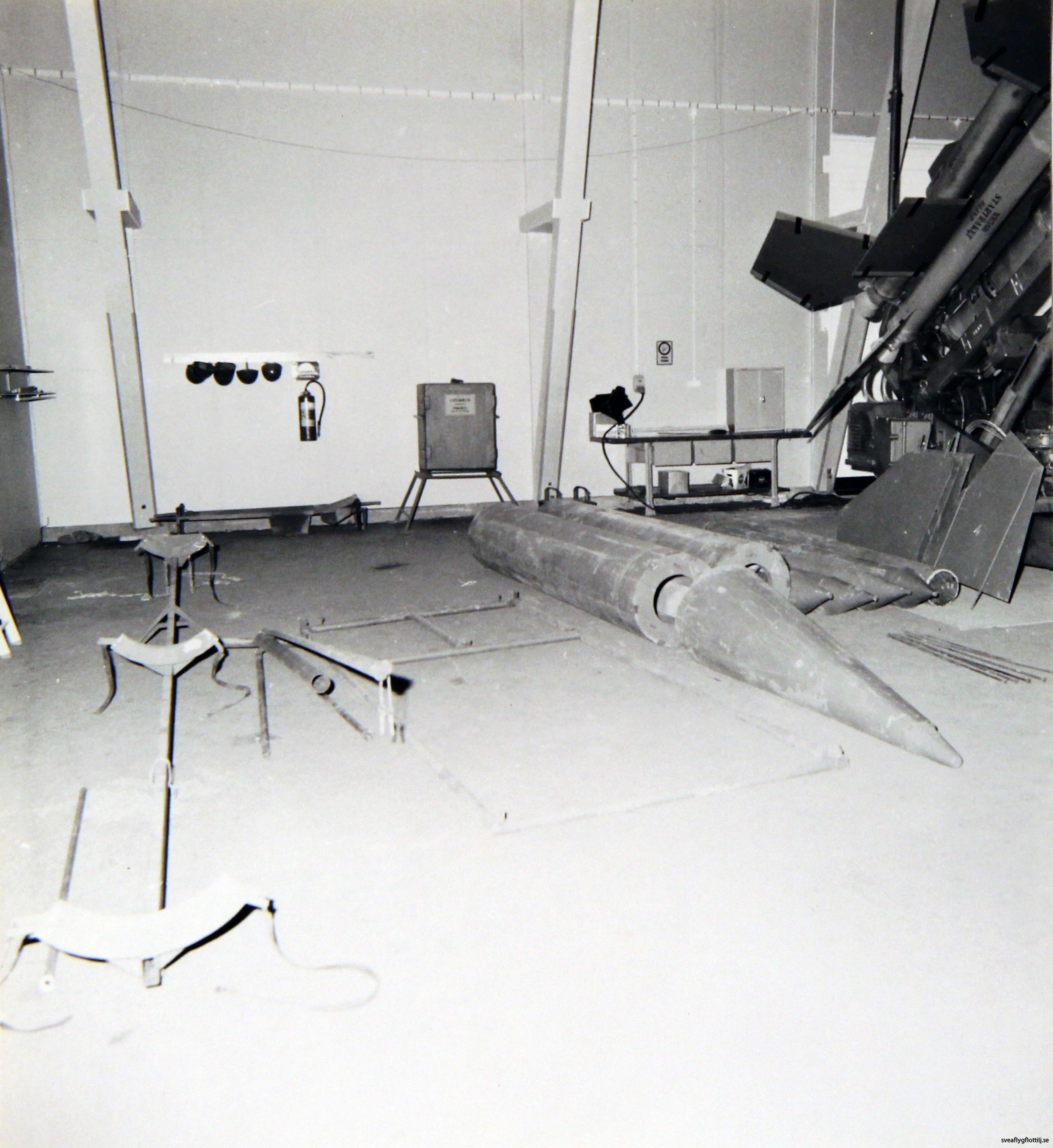
På golvet i F10:s övningshall i Kägelnäs ligger delar till skenmålet, lavettdelar till vänster och robotdelar till höger. Längst till höger står en simulerrobot med blinda startraketer.
Foto: Göran Svensson, F 10.

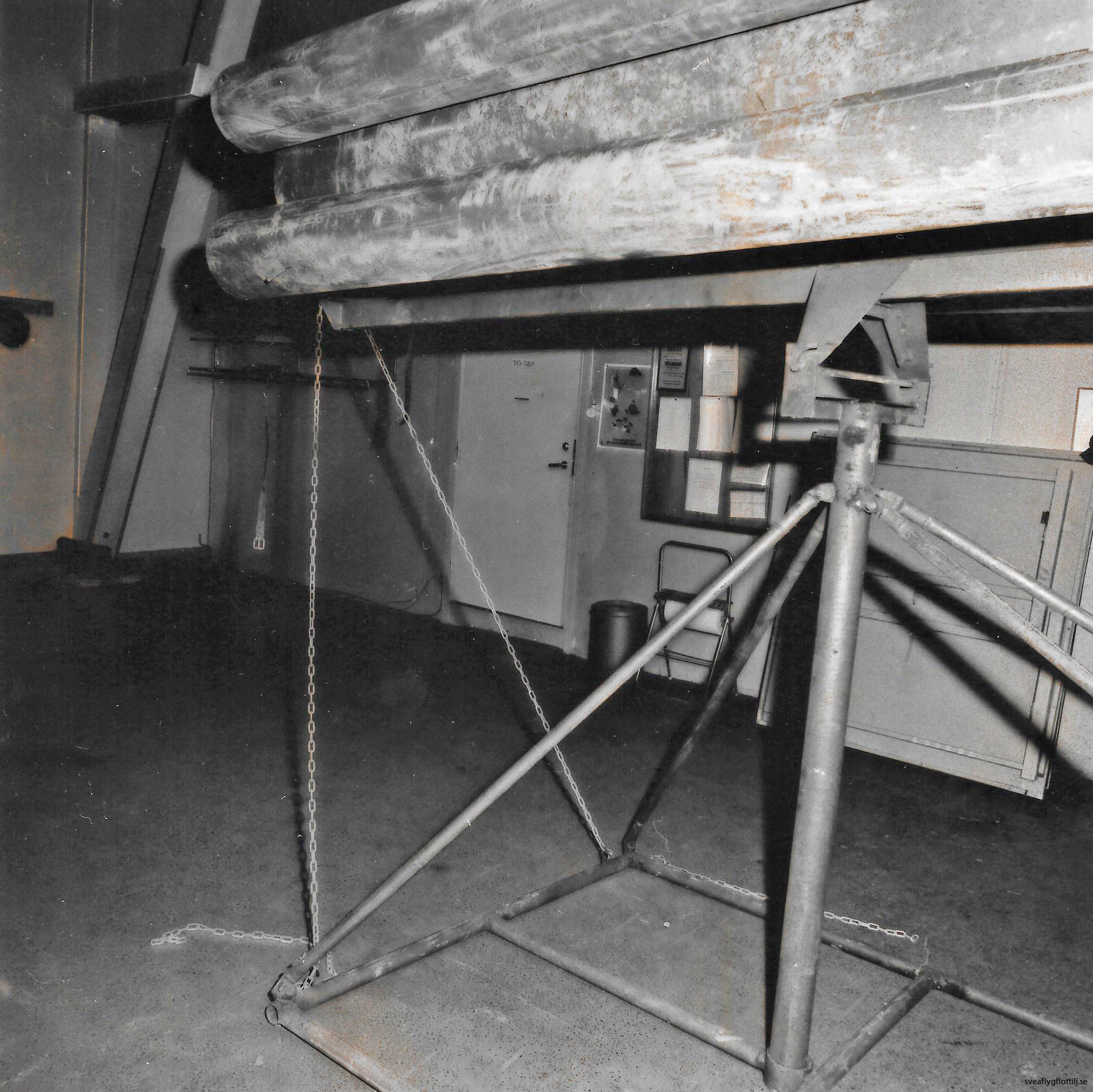
Lavetten monterad.

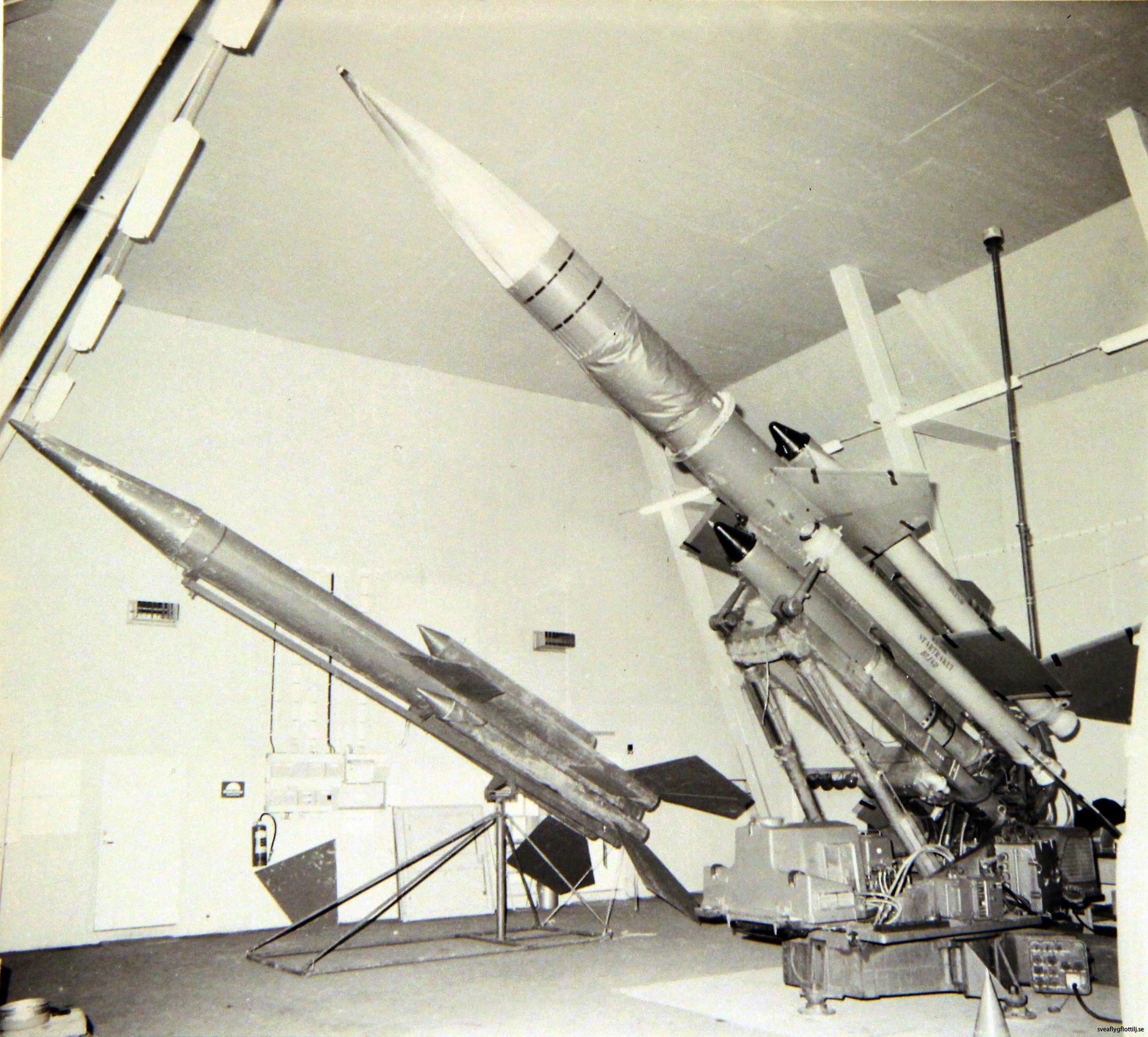
Skenmålsroboten hopmonterad och ståendes bredvid simulerrobot.
Foto: Göran Svensson, F 10.
Nu är det dags att se resultatet av allt arbete. Platsen nedan är okänd men mycket troligt är att man är på P 2 skjutfält vid Hovdala, där kunde verksamheten bedrivas utan nyfikna blickar.

Fyra skarpa robotar på lavett, ja, det skulle man kunna tro om man ser gruppen på avstånd.



På dessa två bilder ser man plastremsorna som ska föreställa kabeldragningarna. På den högra bilden ser man även maskerade fordon.

Här står två fordon, som med största säkerhet ska föreställa rbgc med luftkonditionering och motorgenerator.

För att simulera en brr använde man en TMR-buss (Transportabel Mark Radio)

Man kan förstå varför en TMR-buss var lämplig som skenmål för brr. Dels hade den utgått ur rullorna, dels finns det bra möjligheter att fästa det som skulle simulera antennen.
Denna bild är från ett helt annat tillfälle som inte har med Robot 68 att göra.
Foto: Flygvapenmuseum.