Kontrollskjutning vid RFN 1971
Författat av Håkan Wall.

RFN Vidsel.
F 10 får order om att förbandet ska utföra kontrollskjutning av Robot 68 under vecka 17-20 1971. Kontrollskjutningen ska ske vid RFN (Robotförsöksplats Norrland) utanför Vidsel i Lappland. Ordinarie skjutperiod är 710419 – 710508, reservperiod 710509 – 710515. Det blir 101:a kompaniet som ska utföra kontrollskjutningen medan 102:a kompaniet ska ha uppehålla ordinarie beredskap på fredgrupperingsplats.
Nu påbörjas en mängd förberedelser, ansvarig för detta blir kompanichef kapten Göran Svensson. Enligt den preliminära tidsplanen som upprättas ska detta påbörjas redan den 11:e januari 1971 och sedan pågå ända fram till avresan från F 10 den 13/4. En krigsförbandsövning (KFÖ) som var planerad att äga rum senare under året ställdes in, det fanns inte tid för planering för en sådan omfattande övning samtidigt.
Inför varje provskjutning provades all utrustning i belysningsradar, robotgruppcentral och robotar vid respektive förband för de skjutfall som skulle ske under provskjutningen. I januari skulle utrustningen trimmas och provas, under 1:a veckan i februari skulle provutrusningen monteras in i testrobotarna av TELUB, sedan fortsatte det med systemprov och intensivprov under hela februari. Intensivprov innebar att all utrustning var i drift under minst 24 timmar för att testa funktion inför de långa drifttiderna vid provplatsen. Mars månad fortsatte med förberedelser för lastning och slutlig intrimning av robotarna. Slutlig intrimning innebär att man gör ännu en test att den inmonterade provutrustningen fungerar utan anmärkning. I slutet av månaden skedde montering av provutrustningen i belysningsradarn. Denna kontrollerades också noggrant. Under sista veckan av mars sker klargöring av fordon och lastning.
Ingemar Thorsell, robotstridsledare, berättar att kompanichef Göran Svensson, 1:e verkmästare Gunnar Nilsson och han själv åkte upp till RFN tidigare under vintern för att beställa boende samt ha möten med RFN och fastställa fördelning av arbetsuppgifter. Det var viktigt att säkerställa vad som åligger RFN respektive förbandet.
Några veckor innan avresan färdades Börje Hedberg (chef för transportgruppen) hela vägen till Vidsel för att kontrollera färdvägen. Det var viktigt att kontrollera marschväg, rastplatser och framkomlighet, exempelvis vid viadukter och liknande.
Redan den 1/3 skickar FMV en beställning av resning av simulatormast till F 21. Resningen ska ske 1971-04-19, helst före kl. 12.00.
Den 31/3 upprättar kapten Göran Svensson divisionsorder 9/71 som innehåller: 1) tidsplan, 2) personalorganisation, 3) lastningsplan, 4) personalens fördelning på fordon, avlösning, anropssignaler, 5) marschplan, 6) förläggning, 7) förplägnad, 8) personlig utrustning, 9) samband, 10) dagbefäl, bevakning, 11) säkerhetstjänst, 12) personalvård, 13) sjukvård, 14) ekonomiska bestämmelser, 15) övrigt.
1) Tidsplanen innehåller uppgifter om beräknad tid för dagens marsch samt uppgift om dagens mål. I samtliga fall utom ett skedde övernattning på militärt område, detta för att underlätta förplägnad och bevakning av utrustningen. Sista natten fick övernattning ske på OK Motorhotell i Öjebyn, detta för att man väntade sig vinterväder från Umeå och upp till Vidsel. Längsta restiden var dag 2 mellan F 3 vid Malmen till
I 14 i Gävle, 07:30 – 20:00. Göran Svensson bekräftar vid samtal 2015 att tidsplanen höll hela vägen.
2) Personalorganisationen anger all deltagande personal samt deras tjänst, 17 befäl samt 29 värnpliktiga, varav 10 värnpliktiga inlånade från F 17 och F 12. Göran Svensson och Bo Heinegård flög till Kallinge för att informera utvalda, det var inget ”fritt valt arbete”. Göran minns att det var en värnpliktig från F 17 som hade sådan hemlängtan att man fick ordna att han kunde ringa hem vid några tillfällen.
3) Lastningsplan anger samtliga 16 fordon som ska ingå och hur de ska lastas, här finns lastbilar, robotlastbilar, buss (större), WV-buss, WV-variant och en MC. Även vilka fordon som ska dra ett släp anges. Ett lyftok skulle hämtas på F 13 i Norrköping under resan norr över. Ett fordon avsattes för denna omväg. En robot fanns med hela resan, övriga tre robotar transporterades med flyg från TELUB i Växjö till Vidsel. Dessa var utrustade med viss mätutrustning redan från fabrik men var nu kompletterade med två extra säkerhetsfunktioner. CBU – enfunktion som bara fanns vid provskjutning och innebar att skjutledaren kunde spränga roboten vid fel på enheten, TSDU – ännu en säkerhetsfunktion som bara används vid provskjutning. Det var en tidsstyrd enhet som sprängde roboten en viss tid efter att målet passerats. Om stridsdelen inte löstes ut skulle roboten sprängas innan den lämnade skjutområdet. Risken fanns annars att den skulle fortsätta in i Norge.
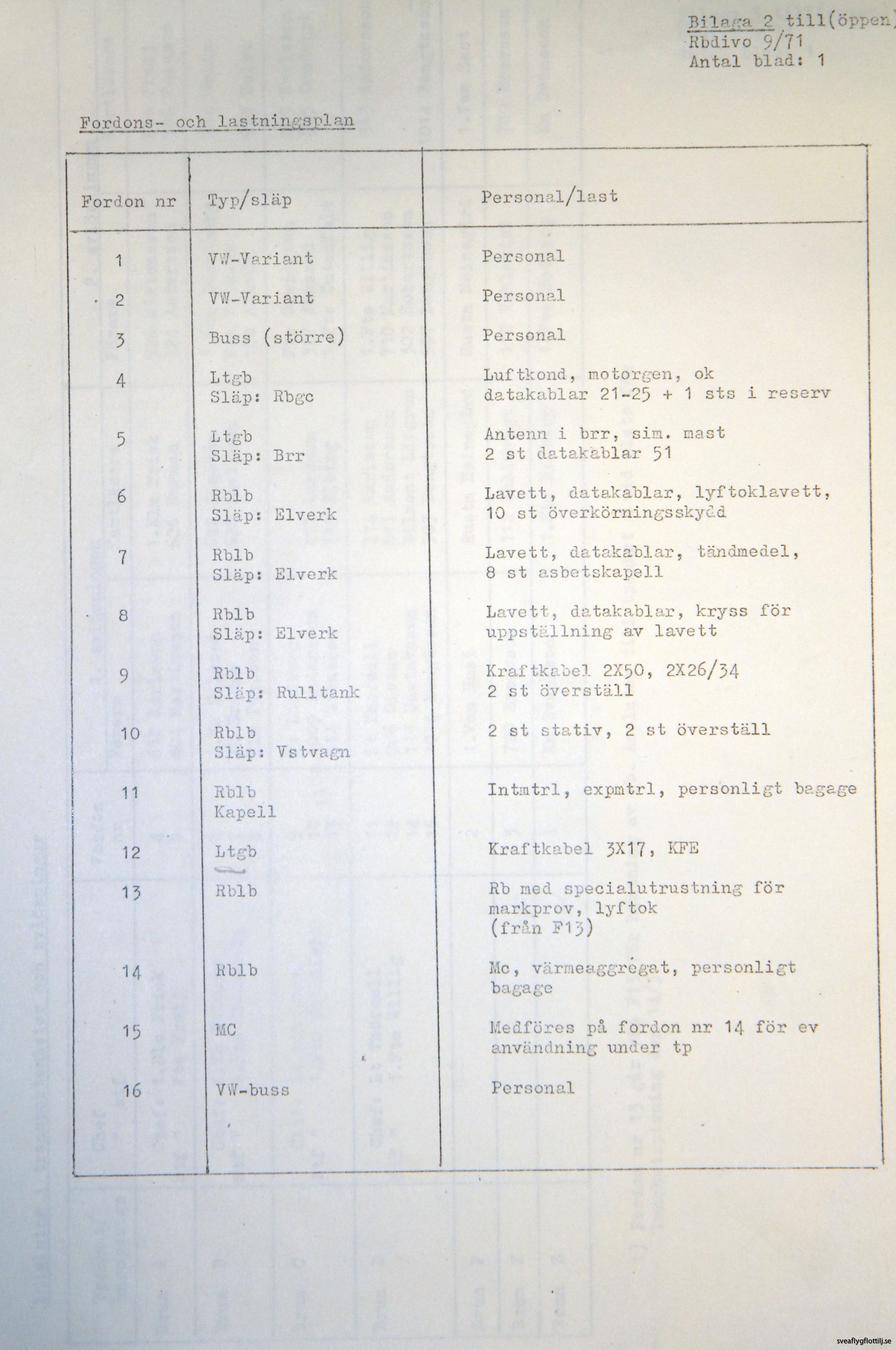
Fordons- lastningsplan.
Källa: Arboga Robotmuseum.
4) Personalens fördelning på fordon, avlösning, anropssignaler. Här fastställs fordonsförare och kartläsare, deras avlösare, fordonens indelning i grupper och respektive grupps anropsignal. På grund av att det bara fanns en värnpliktsomgång med utbildade chaufförer inne under denna period fick även stampersonal agera som fordonsförare. Varje grupp medförde en sambandradio och fick sig tilldelat en anropssignal, Brun A – F, den stora bussen fick Brun K samt att Göran Svensson själv i sin VW Variant hade Brun Z.

Börje Hedberg med sambandsradio någonstans på vägen till eller från Vidsel, det är något oklart vilket.
Foto: Göran Svensson, F10.
5) Marschplan delades ut separat och bifogdes inte ordern. Transporten leddes av förbandschefen (Göran Svensson) och 1.e flygtekniker Börje Hedberg i en VW Variant.
6) Förläggning. Här anges vid vilka regementen som förbandet ska övernatta under resan samt sista resdagens övernattning vid OK Motorhotell i Öjebyn. Rustmästare Heinegård hade bokat hela detta hotell i mycket god tid. Det framgår också att vid framkomst till RFN ska de värnpliktiga förläggas i barack på övningsområdet vid Punkt C och stamanställd personal på Hotell Renkronan i Vidsel.
7) Förplägnaden under resan bokades på militära förband utmed färdvägen. Hast, chef för robottropp, och Heinegård, rustmästare, åkte i förväg för att säkerställa att maten var klar i tid för att undvika förskjutningar i tidsschemat. Vid Punkt C åt man i den matsalsbarack som fanns på platsen. Stamanställda och värnpliktiga bussförare intog även måltider på Hotell Renkronan.
8) Personlig utrustning upptog all personlig utrustning. Kan noteras att för hela tiden som planerades till 4 veckor skulle endast 4 kalsonger tas med, 2 kortkalsonger och 2 långkalsonger. Tvättbyte ordnades på Punkt C.
9) Samband. Särskilda rutiner tillämpades för samband mellan fordon under marsch. Göran Svensson berättar att man undvek att använda radio pga. risken för signalspaning från främmande makt, istället använde man signalspadar. Spaden stacks ut från fordonet längst fram i kolonnen. En långsam rörelse upp och ned innebar att avstånd mellan fordonen skulle öka, (landsväg) snabb rörelse upp och ner innebar att kolonnen skulle krympa avståndet mellan fordonen, (stadstrafik). Ingemar Thorsell minns även han att man inte fick utnyttja radiosändaren under marsch då en rysk trålare gick utmed kusten i kolonnens marschhastighet.
Vidare redogörs för samband vid bevakning av Punkt C samt samband och anropssignaler för skjutorganisationen.
10) Dagbefäl, bevakning. Dagbefäl vid Punkt C tjänstgjorde i rullande schema med 2 dygn i stöten, vidare fastställs vem som är ansvarig för vakthållning vid övernattning och på rastplatser.
11) Säkerhetstjänst. Att försökens uppläggning, tidpunkt och resultat var hemliga kan inte varit någon överraskning för någon. Ansvariga är kapten Göran Svensson och 1:e verkmästare Gunnar Nilsson. Fototillstånd vid Punkt C kan endast beviljas av C RFN.
12) Personalvård. Ansvariga för personalvårdande trivselåtgärder och fritidsaktiviter är divisionschef (Göran Svensson) samt rustmästare (Bo Heinegård).
13) Sjukvård. Sjukvårdare tillhandahålls av F 21 resp. Lv 7. Hänvisning även till vårdcentralen i Älvsbyn.
14) Ekonomiska bestämmelser. De sju första dygnen utgår traktamente motsvarade krigsförbandsövning, vad som händer efter detta framgår ej.
15) Övrigt. Fredsdagbok ska föras av robotstridsledare, stationsavdelningschef, chef eltropp, chef robottropp, chef transporttropp, stabsunderofficer och dagbefäl.
En vecka innan avfärden till Vidsel åkte robotstridsledarna till F 13 för att i träna i robotgruppcentral med simulerad elektronisk störning. De tre robotstridsledarna tilldelades varsitt skjutfall och det var på detta de tränades. FOA ville vara säkra på att robotstridsledaren skulle uppfatta situationen rätt och därmed handlade rätt, detta för att få bästa resultat av provskottet. De störfall som genomfördes låg på gränsen på vad som systemet klarade av. I robotgruppcentralen fanns sex funktioner mot störning och det finns tre stycken indikatorer som visade på förekommande störsignaler. Resultatet analyserades tillsammans med FOA-tekniker sekund för sekund. Medan denna verksamhet pågick på F13 låg en rysk trålare stilla i Bråviken, den var utrustad med en mängd stora antenner. Ingen av kursdeltagarna trodde detta var en slump.
Den 13/4 är det äntligen dags för avmarsch och förbandet lämnar F 10 klockan 07:45. Transporten bevakades under färden, ibland hade man poliseskort genom städer för att slippa stanna i alla korsningar. Många som var med uppger att man lärde sig känna igen civila bilar som följde transporten, man kallade dem för SÄPO-bilar men vet inte var de kom ifrån.
Löjtnant Göran Brauer vittnar om en incident under resan: Plötsligt medan jag kör så kommer det en smäll ”PANG” och det utbreder sig ett moln bakom bilen och samtidigt började lastbilen kränga något. Det var en däckexplosion på ett av de inre bakdäcken. Så det blev nu lite extra jobb med att byta däck. Tur att vi kunde köra 70 km/tim vilket gjorde att vi snabbt kom tillbaka till vår plats i kolonnen. Nu efteråt får man väl vara glad att det ”bara” var en däckexplosion.
Mer detaljer om resan kan läsas i stycket ”Värnpliktig på F10 robotdivision”
RFN är beläget vid Flygvapnets krigsflygfält Fält 42 strax utanför Vidsel. Själva skjutfältet ligger norrut och från RFN är det ca 1 timmes bilfärd till skjutplatsen vid Punkt C. Med tanke på att delar av förbandet inte fick färdas fortare än 30 km i timmen och att det var vinterväglag tog denna sista etapp betydligt längre tid.
Väl framme vid Punkt C den 19/4 skulle nu utrustningen ställas upp, kablage dras och alla funktioner kontrolleras.
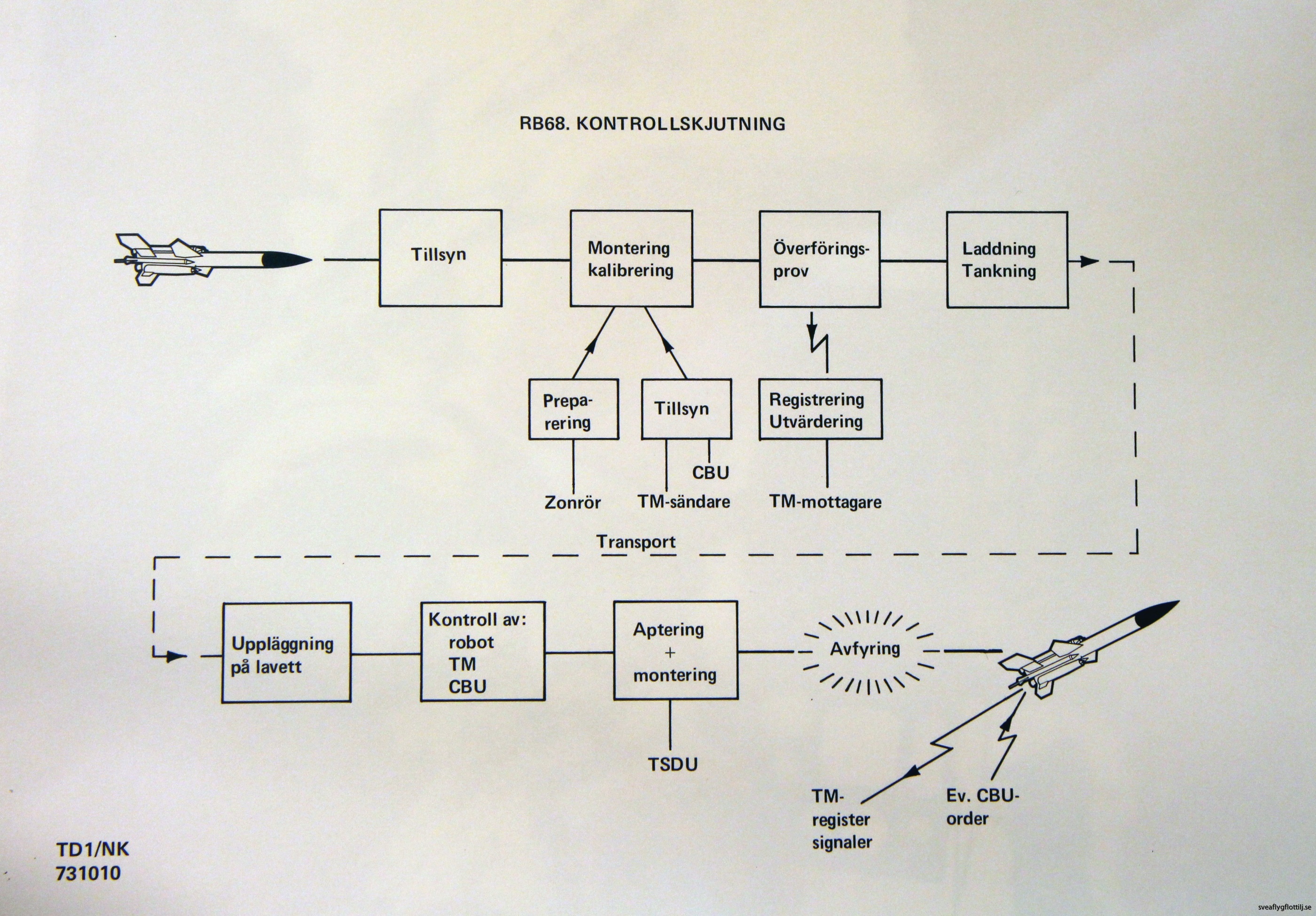
Schema över förberedelser.
Källa: Arboga Robotmuseum.
När robotgruppcentral och belysningsradar kommit på plats så visade det sig att det var fukt i kraftkablarna. På eftermiddagen fungerar kraftförsörjningen och uppstart kunde ske av utrustningen. När kablaget var draget till robot för markprov kunde även den startas upp och allt fungerade. Order var att tre robotar skulle kunna klargöras men det fanns bara två stycken betongplattor för montering av lavett. På grund av detta hade man innan avfärd tillverkat ett lavettunderlag av kraftiga u-balkar. Denna förankrades nu med jordankare, det var aldrig meningen att man skulle skjuta från denna lavett. Sent på kvällen anländer de återstående tre robotarna.
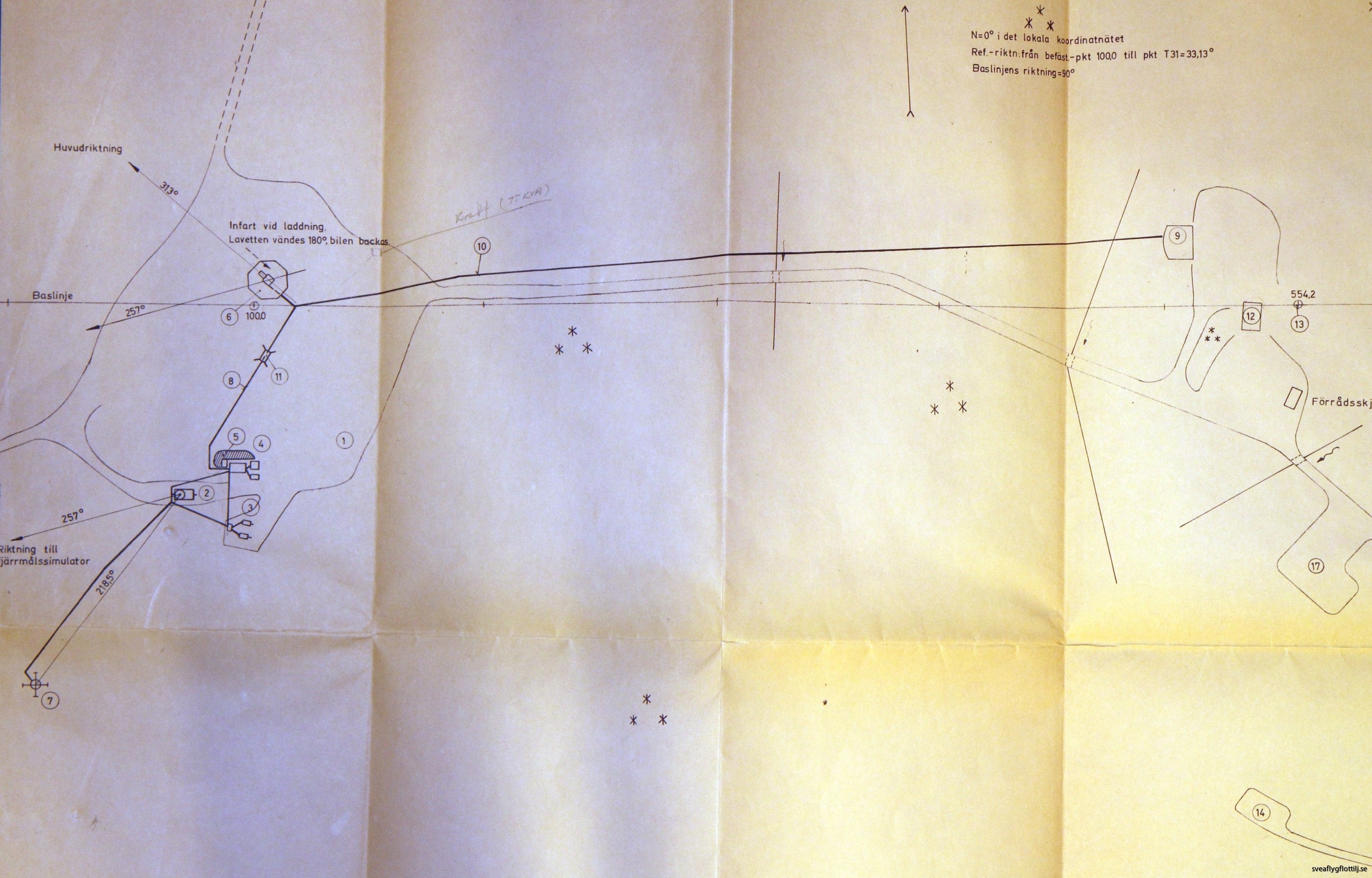
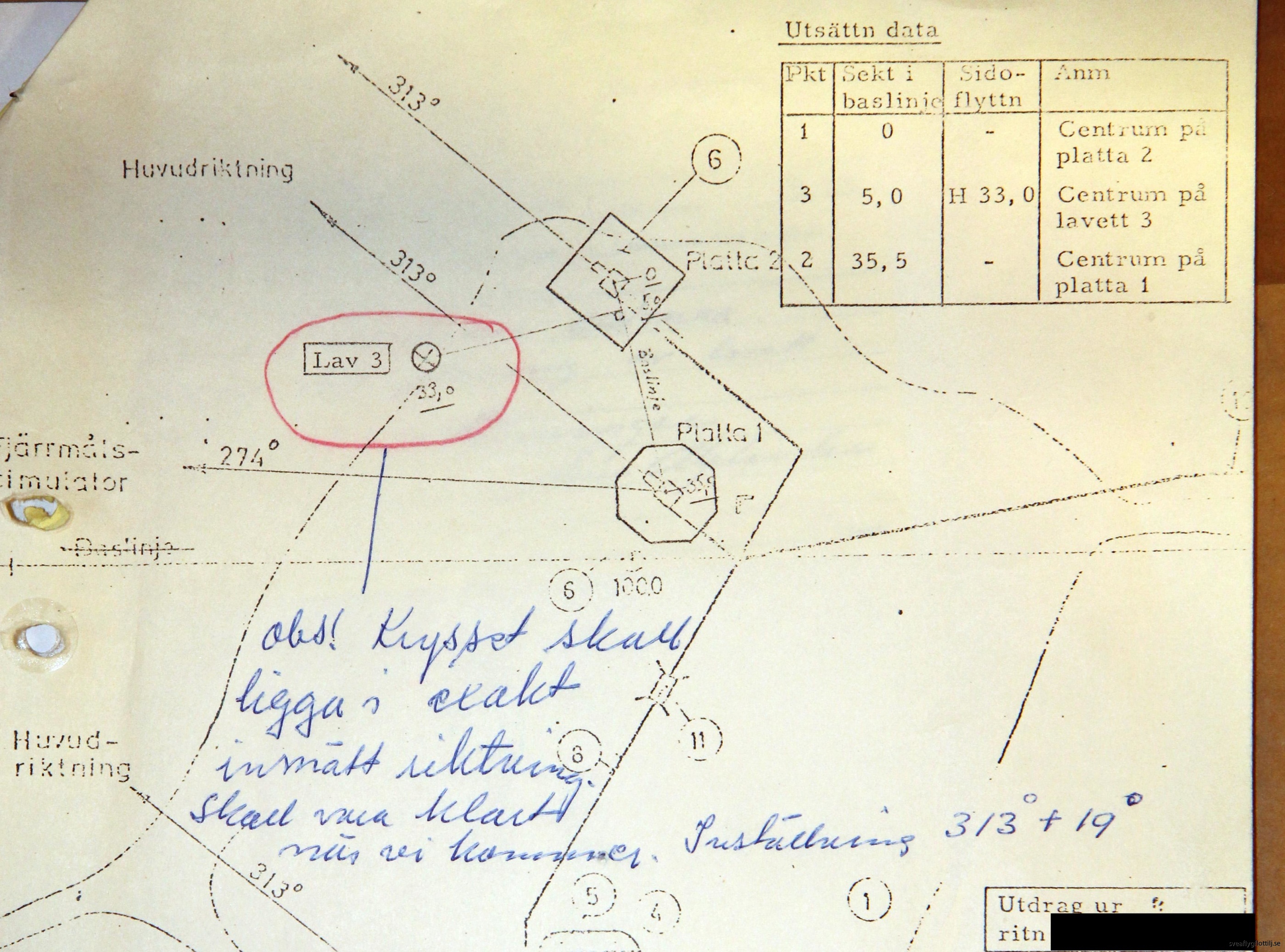
Situationsplan visandes Punkt C RFN Vidsel vid F10 kontrollskjutning.
Källa: Arboga Robotmuseum
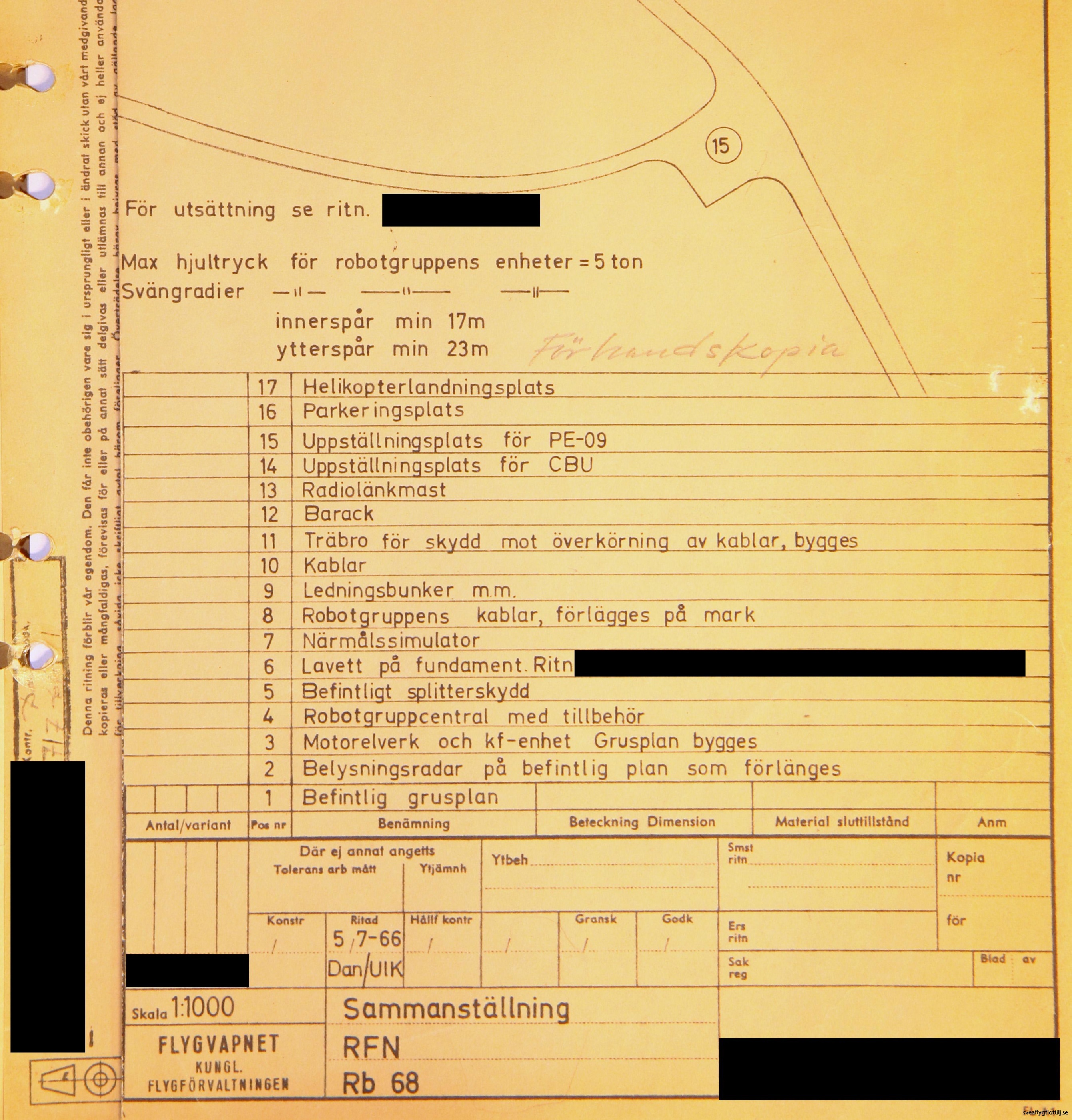
Teckenförklaring till situationsplanen.
Källa: Arboga Robotmuseum.
Källa: Arboga Robotmuseum.
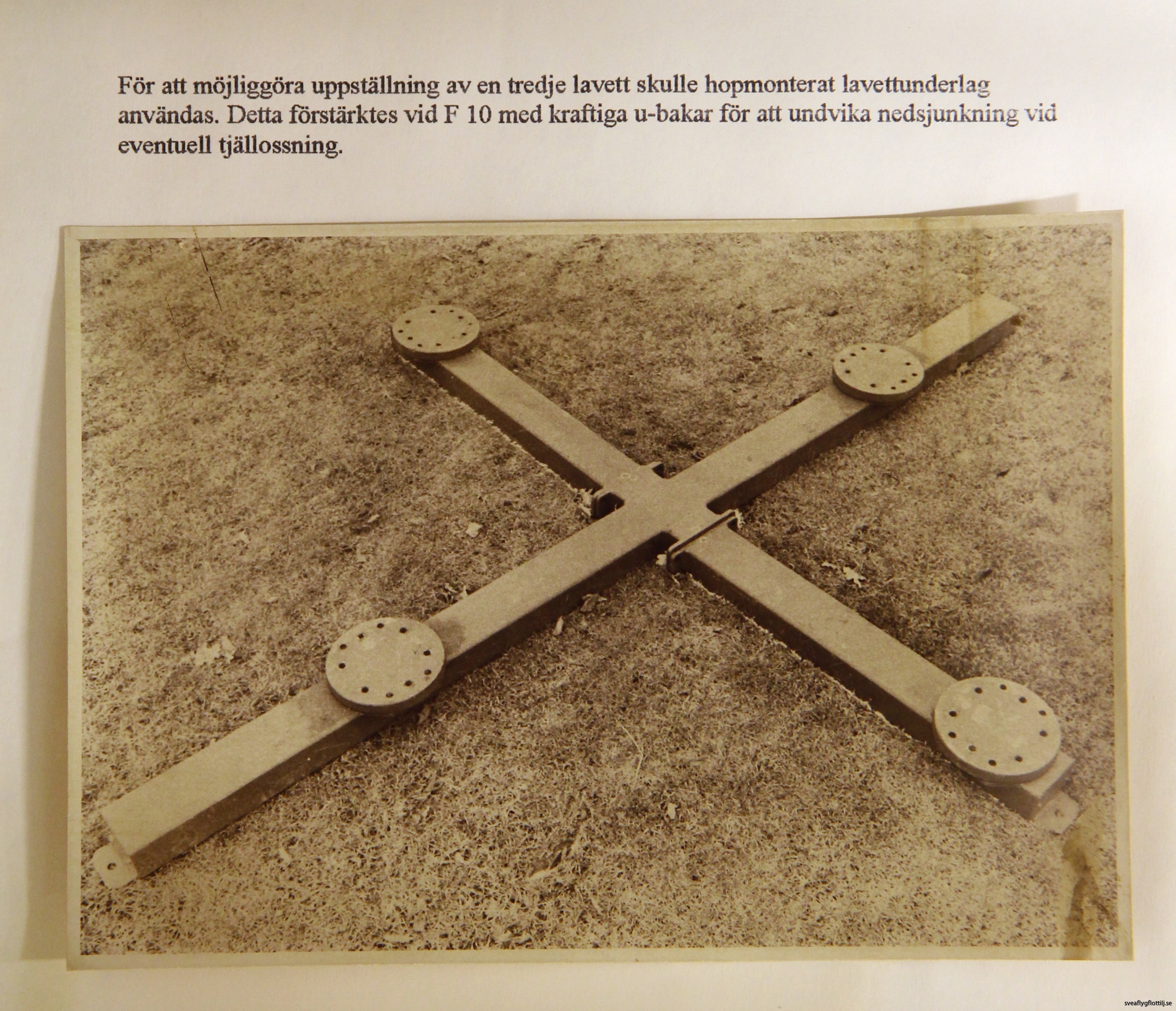
Det tillverkade lavettunderlaget. Detta var endast för uppställning och klargöring.
Källa: Arboga Robotmuseum
Förbandets värnpliktiga utgjorde vaktstyrka under hela vistelsen. Vaktstyrkan bestod av totalt sex man med två man i taget i ständig vakttjänst. Förutom vakttjänst ingick även kontroll av kraft- och varmluftsaggregatens funktion.
Det tog några dagar att få all upprustning på plats, att kontrollera funktion och klargöra robotarna. Under tiden anlände flera personer som skulle medverka vid kontrollskjutningen.

Börje Hedberg, chef transporttropp, öppnar bommarna till övningsområdet.
Foto: Göran Svensson ,F 10.

Ankomst till Punkt C.
Foto: Göran Svensson. F10.

Verkstadsvagnen på Punkt C.
Foto: Göran Svensson, F10.

Robotstridsledare fr.v Göran Brauer, Ingemar Thorsell och Bo Lindberg hållandes bakre väderskydd till rammotor.

Robotplatta 1 närmast, robotplatta 2 i bakgrunden
Foto: Göran Svensson, F 10.

Robotplatta 1 närmast, robotplatta 2 i bakgrunden
Foto: Göran Svensson, F 10.

Robot placeras på lavett. Vid lavett fr.v - vpl Elbing, okänd och vpl Svensson.
Foto: Göran Svensson, F 10.

Robot placeras på lavett. Vid lavett vpl Elbing.
Foto: Göran Svensson, F 10.
Robot lyfts från robotlastbil. Notera att snedanblåsningströmställare inte är monterad.
Foto: Göran Svensson, F 10.
Kablar dragna till lavett monterad på det tillfälliga lavettunderlaget.
Foto: Göran Svensson, F 10.
Det var kallt i Vidsel och det var inte robotarna byggda för. Därför värmdes främre delen av roboten i ett särskilt konstruerat värmetält (kapell) på en av lastbilarna för att hålla elektroniken ljummen, det var mätutrustningen i provrobotarna som var känslig för kyla.
De värnpliktiga vakterna passade på att värma sina frusna händer på värmeslangarna under de kalla nätterna.

Robotarnas värmetält, ett specialkonstruerat kapell.
Foto: Göran Svensson, F 10.

Robotarnas värmetält, ett specialkonstruerat kapell.
Foto: Göran Svensson, F 10.
Under hela tiden förbandet var på plats dök en räv upp dagligen för att få mat, den blev nästan tam.

F10-räven. Den höll sig gärna framme när det vankades mat, och visst ser det nästan ut som att den poserar för kameran!
Foto: Göran Svensson, F 10.

Sedan dröjde det ett antal dagar innan första skottet gick. Vid kontroll av förbindelser och överföring av TV- information konstaterades fel på TV-funktionen. Luftkonditioneringsutrustningen för robotgruppcentralen stannade plötsligt och vid återstart utlöstes 60-amperesäkringarna på kraftaggregaten som skulle strömförsörja hela robotgruppen. Det var även problem med belysningsradarn under några dagar och efter totalprov den 27/4 får man genomföra ett klystronbyte. Därefter fungerar allt. Ingmar Persson som arbetade på TELUB har noterat följande i sin dagbok:
20/4 B.2.2.3 utbytt (Lån från Brr 502, tillhörande F8). -25V borta, B10.7 utbytt. C131 utbytt. Övertid 1 tim, 16:30 – 17:30.
21/4 Kabel 23 Rbgc – Brr utbytt. B.8.3.5 utbytt. Övertid 2 tim, 16:30 – 18:30.
22/4 OLT 4752. OLT 4753.( OLT= On Launch Test) Övertid 2,5 tim, 16:30 – 19:00.
23/4 Överföringsprov 4753.
26/4 OLT 4751. Lagat kontakt till C1-filtret. Övertid 4 tim, 16:30 – 20:30.
27/4 Totalprov. Klystronbyte Brr. Övertid 4 tim, 05:30 – 07:30, 16:30 – 18:30.
Göran Brauer berättar att man ägnar hela torsdagen den 22/4 åt systemprov nr 1 och 2. Nr 1 innebar att man med en J 32 B Lansen flög ett antal mållöpor för att testa robot- och målföljningssystem. Nr 2 innebar att man med J 32:an flög som om man var en robot 68. Man flyger in lågt bakom roboten (som står på marken) och stiger över denna med 34 graders elevation, samma som roboten har när den startar. Provet är till för att prova målföljningssystemens radar, teodoliter och optiska utkikar. Under fredagen den 23/4 flyger man operativa mållöpor med J 32 enligt de olika skjutfall som senare kom att genomföras.
Nu var det bara att vänta in bra väder. Teodoliten på berget Sarkas besvärades av moln och hade därmed inte fri sikt, kravet var 50 km molnfritt.
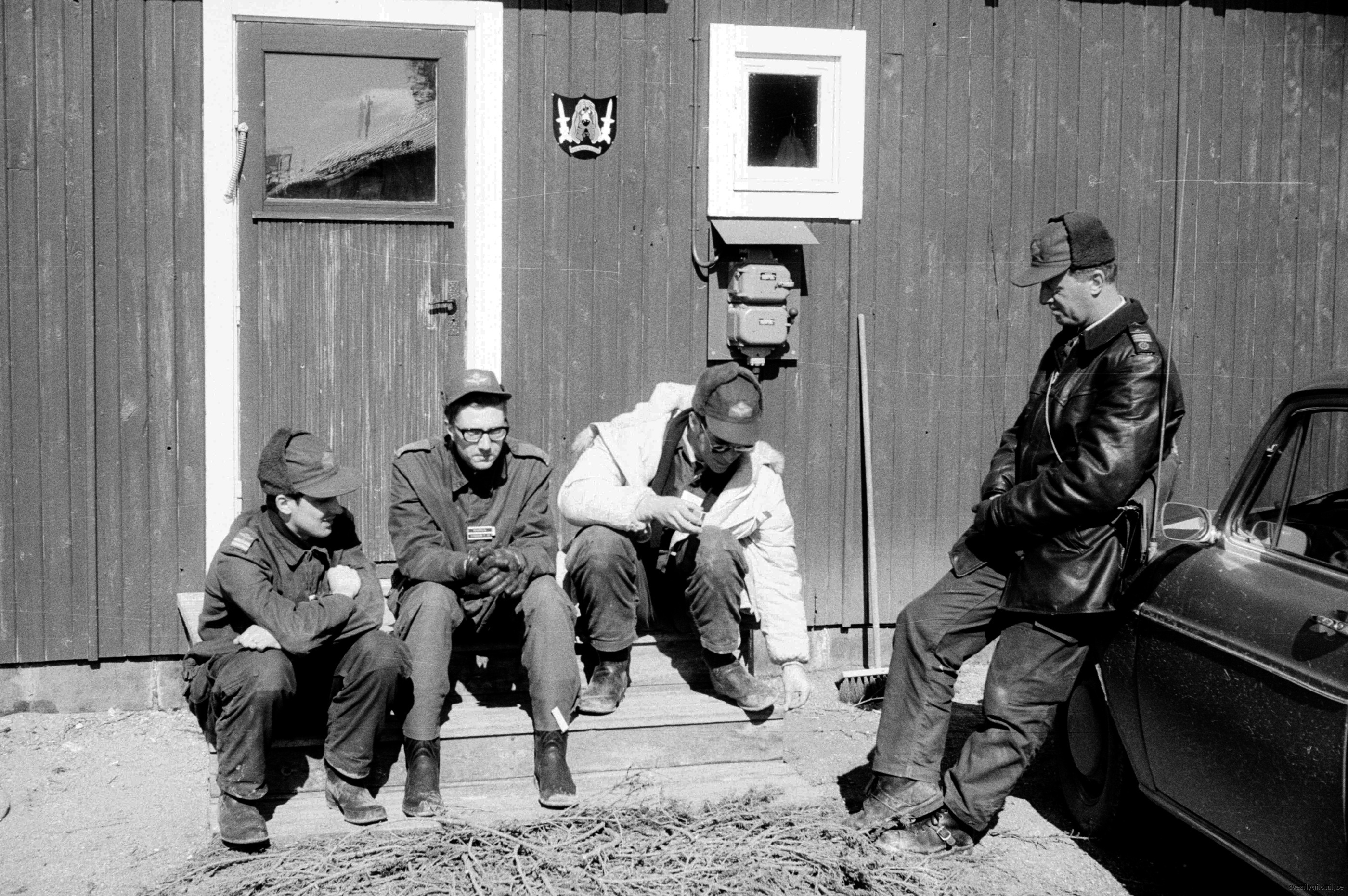
Väntan, fr.v Ingemar Thorsell, Bo Lindberg, Göran Svensson samt stående, verkmästare Gunnar Nilsson. Notera att baracken är märkt med robotdivisionens emblem.
Foto: Göran Svensson, F 10.

Skidåkning ägnade man sig åt på ledig tid. Bo Hejnegård närmast kameran, okänd bakom.
Foto: Göran Svensson, F 10.

Robotdivisionens emblem.
Det fanns tolv teodoliter, tio mätstationer och många kameror i området. Teodoliten skulle följa hela banan och man växlade mellan olika teodoliter. Om solen lyste in i teodoliten såg man ingenting, därför räknade man ut solens bana och fick bara skjuta når solen stod rätt.
Teodoliten mätte passageavstånd med 1 meters felavstånd. Man mätte även höjden. Två teodoliters uppgifter gav exakt position i rymden. Teodoliterna var placerade utanför riskzonen. Inför F 12s skott togs en ny karta fram och då upptäckte man att en av dessa låg inom riskzonen berättar Hans Törnblom, FMV.
Man mätte även passagefarten med optisk inmätning dvs. kamerabilder med tidskod. Vinkel gav bäring och elevation, två kameror tillsammans visade passagen. Dessa kameror tog 40.000 bilder per sekund.

Kameran som fotograferade skotten, RFN Museum,
Foto: Håkan Wall.

PE09 på RFN vid okänd tidpunkt.
Foto: Arboga Robotmuseum.
Det fanns även tre stycken PE09 (radar till robot 365) och de följde både målrobot och robot. En stod på
Punkt C, en i Nausta och en på en bergstopp. Roboten syntes inte på radar förrän den kommit upp i höjd och därför följdes skottet av OVAK (optisk övervakning) från torn i trätoppshöjd. I dessa stod värnpliktiga med kikare. De skulle larma ifall roboten avvek från banan. Denna procedur tränades i förväg med hjälp av en J 32 B. Planet kom in över Punkt C på 5-10 meters höjd och drog på EBK precis över startplatsen. Hans Törnblom minns mycket väl första gången detta hände. Han var inte alls beredd och han skakades om rejält samtidigt som han tydligt såg nitarna i flygplanskroppen strax ovanför huvudet.

Kanske var det denna J 32 B som Hans Törnblom såg nitarna på. RFN hade 3 stycken J 32 B i tjänst. RFN Museum.
Foto: Håkan Wall, med fototillstånd av RFN.

Målroboten som användes vid kontroll-skjutningarna med robot 68 var Målrobot 02 (CT 20). RFN Museum.
Foto: Håkan Wall.
Under ordinarie dagordning (dag när inte skjutning var planerad) gick personaltransport från Vidsel 07.00 med återresa från Punkt C 15:30. När provskott var planerat började personaltransporterna från Vidsel redan 24:00 (operativ dagordning II). Personal från FMV flögs till Punkt C med helikopter, övriga fick åka buss.
Göran Svensson var skjutledare och berättar: "Skjutledaren var en sorts länk mellan FMV och förbandet, det var tidigare bestämt att chefen för robotdivisionen inte fick vara "skytt" även om han hade samma utbildning som robotstridsledarna. Det skedde dagliga sammanträden mellan mig och FMV. Skjutledaren och övriga i skjutledningen följde var sin checklista, som skjutledare hade jag telefonförbindelse med bl. a våra tekniker i robotgruppcentral och belysningsradar, och troligen hade även RFN på Vidselbasen medhörning. Om jag minns rätt hade jag "stationssignal" "vit åtta". Jag hade bl. a rätt att t. ex avbryta påbörjad nedräkning om jag ansåg att prestanda på någon enhet inte var 100 %".
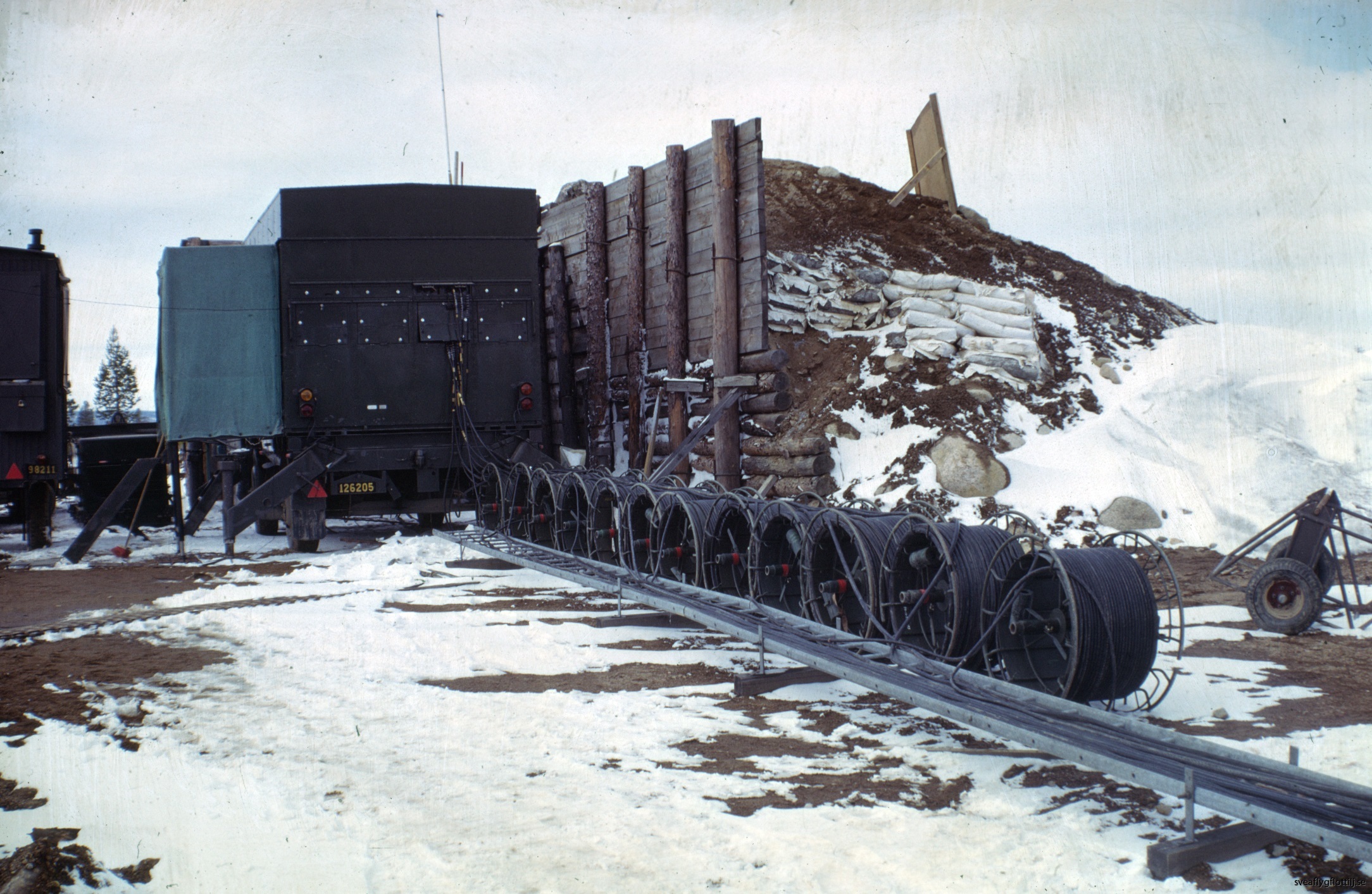
Robotgruppcentral bakom sin skyddsvall. Okänd tidpunkt.
Foto: Arboga Robotmuseum.

Två stycken belysningsradar på plats, dels F10:s medhavda, dels reservenhet inlånad från F8.
Foto: Göran Svensson, F 10.
Göran Brauer om de närmaste dagarna:
”Tisdagen den 27 april. Den tekniska personalen fick åka ut till punkt C redan klockan 04:50 för att förbereda utrustningen för ett fullprov. Vi robotstridsledare skulle vara på plats klockan 08:00 för provet som sedan avbröts klockan 09:00.
Det uppstod fel i belysningsradarn och fel i ett kretskort i robotgruppcentralens datamaskin.
Lunch klockan 11:15 och ny operativ körning från klockan 11:50. Belysningsradarns avståndsmätning varierade. Således mer handpåläggning på radarn. Det blev många justeringar och mätningar innan den blev operativ. En erfarenhet som vi också fick ta med oss hem.
Under tiden hände det saker med robotarna, man apterade och klargjorde robotarna för skjutning.
På eftermiddagen kom den första ordern om ”Operativ dagordning II”. Nu började man känna att det var saker på gång.
Skulle jag få skjuta en robot som 1965 när de köptes kostade 400 000 kr styck. Detta ska jämföras med min löjtnantslön som då var ca 2 700 kr/månad före skatt.
Onsdagen den 28 april. Operativ dagordning II! Klockan 02:25 gör teknikerna A-service på all utrustning.
K 1 (preliminär avfyringstidpunkt) är satt till klockan 08:40 och K 2 (slutlig avfyringstidpunkt) är klockan 10:50.
Vi robotstridsledare kommer på plats klockan 04:00. Inriktningen är att Bo Lindberg ska vara först med sitt skjutfall. En provlöpa är beordrad till klockan K -50. (kl. 06:50)
Klockan 06:00 fel i belysningsradarn. Man lyckas reparera felet.
K -50 genomförs en skjutlöpa med J 32 B. Belysningsradar åter ur funktion.
Klockan 11:25 avbryts skjutningen. ”Operativ dagordning II” beordras för nästa dygn.
Torsdagen den 29 april
All personal på plats på punkt C klockan 01:30. Klar himmel utan moln.
Skjutledaren diskuterar en eventuell omkastning av skjutfall.
Återigen ett belysningsradarfel. Denna gång är det sidvinkelenheten som har problem.
Man försöker att reparera men lyckas inte. Skjutningen avbryts klockan 09:50.
Order om ”Operativ dagordning II” på Valborgsmässoafton”.
Bo Lindberg skulle skjuta det första skottet men hela veckan kom moln i vägen för någon av teodoliterna (om inte alla teodoliterna hade kontakt avbröts skottet) och därmed blev avfyringen uppskjuten, eftersom detta skjutfall var mest avancerat krävdes helt klart väder och det bestämdes att Göran Brauers skjutfall skulle genomföras istället.
Skott 1, 30/4 1971 och Valborgsmässoafton
Man åkte från hotellet klockan 01:00 och kom fram till Punkt C 02:00, efter alla förberedelser var man på plats i robotgruppcentralen 07:00 och färdig att avfyra. Inför förberedelse för 1:a skottet sköt man upp en raket från Punkt C för att trimma in de kameror som fanns runt om skjutplatsen så att de var rätt inställda för att dokumentera skjutningarna. Två provrobotar stod i beredskap, man väljer den som klargörs bäst. Rolf Persson, värnpliktig, ger följande ögonblicksbild: ”I robotgruppcentralen satt en kamera monterad som tittade över axeln på robotskytten mot kontrollpanelen. Över knappen FIRE satt ett plastskydd som kunde fällas upp. Över samtliga kontrollampor satt filter (som bestod av två korslagda polarisationsfilter som vinklades lagom mycket för att dämpa lampornas styrka inför filmningen).”
Göran Brauer: ”Jag fick sätta mig vid robotstridsledarens panel och klockan 08:14:31 så lyfter jag på säkerhetslocket och trycker på avfyrarknappen med mitt pek- och långfinger på höger hand, inte med tummen. Det hörs ett antal mindre smällar, när väderskydden skjuts loss, och kl 08:14:37, sex sekunder efter knapptrycket, så lämnar roboten lavetten med ett kraftigt dån och robotgruppcentralen skakar”.
Ingmar Perssons dagbok igen: 30/4 Operativ dagordning 2. 4751 FIRE 08:15. Övertid 7 tim, 00:30 – 07:30.
Ingemar Thorsell som under skott 1 och 3 befann sig på behörigt avstånd utanför riskzonen minns att man hörde en fruktansvärd smäll och sedan var lavetten tom.
Göran Brauer igen: ”Sedan var det fråga om full koncentration på att inte målets störningar skulle kunna påverka robotens bana, här gällde det att haka av störningarna och uppdatera roboten kontinuerligt med korrekt information.
Det lyckades tydligen. Roboten passerade 16 m från målroboten och med den stridsdel som finns ombord, med länkade stålstavar som efter stridsdelens detonation sprids radiellt ut från roboten, så blev målet träffat. Jag uppfattade det som att målroboten blev förstörd.
Sedan var det att kliva ur robotgruppcentralen och få en klapp på axeln. Därefter en promenad bort till lavetten för att beskåda en delvis svartfärgad lavett och avfyringsplatta. Nästa steg var att leta rätt på ett av de främre väderskydden som nu blev en souvenir. Mitt väderskydd sitter idag på Bloodhound-roboten utanför Ängelholms Flygmuseum. När vi målade om roboten för några år sedan, så ersattes ett trasigt väderskydd med min souvenir”.
Göran Almemo, som var servicetekniker på robotgruppcentralen, berättar att zonröret var inställt något för tidigt vilket medförde en fullträff i målroboten, vilket inte var meningen och det blev ”ett djävla liv”. Målrobotar var dyra och dessa skulle man undvika att skjuta ner.

Raket för att trimma in kamerautrustningarna precis före det riktiga skottet.
Foto: Göran Svensson, F 10.

Göran Brauers skott med robot 4751.
Foto: RFN.
På kvällen firar man på Hotell Renkronan med öring till middag och Göran Svensson låter till desseren servera ett portvin han köpt i Helsingör som heter Bloodhound. Flaskorna var sexkantiga och prydda med en stor blodhund.
Efter skott 1 börjar man förbereda för skott 2 och det tar några dagar innan allt är klart för nästa kontrollskjutning. Nu återstår två skott, bägge hade störfall men i olika form. Ett med 0-dopplerfall och ett med avhakningar.
Ingmar Perssons dagbok:
2/5 Åkt skidor på Vittjåkkfjället.
3/5 OLT 4752. Övertid 0,5 tim, 23:30 – 24:00
4/5 Operativ dagordning 2. 4753 FIRE 08:15. Övertid 7,5 tim, 00:00 – 07:30
Skott 2, 4/5 1971
0-dopplerfall innebar att målroboten släpptes från ett flygplan och efter att belysningsradarn låst på målet och uppdaterat robotens målsökare med målets position svänger målroboten 180 grader. Belysningsradarn tappar då målet när det ligger under sväng eftersom dopplerradarn inte ser mål som går på parallell kurs, normalt förfarande (engelsk instruktion) var att robotens målsökare uppdaterades var 10 sekund med information från belysningsradarn men eftersom belysningsradarn inte hade någon information om målet nollställdes då minnet i målsökaren. Från svensk sida föddes då tanken att om robotstridsledaren stängde av uppdateringen av robotens målsökare så snart målet tappats så behölls den ursprungliga informationen i målsökarens minne och roboten styrde mot den framräknade framförpunkten. Målet kommer ur sin sväng och belysningsradar låser åter igen på målet, strax innan beräknad träff låser robotstridsledaren upp robotens målsökare, en ny målsignal skickas från belysningsradarn och minnet i robotens målsökare uppdateras med korrekta uppgifter. Engelsmännen blev förfärade över den svenska tekniken och frågade om ”vi ville tappa bort roboten?”. Efter att ha utvärderat resultaten började dock även RAF efter en tid att tillämpa samma teknik och detta förlängde livstiden för Bloodhound Mk II i RAF.
Det var denna taktik som Ingemar Thorsell nu skulle tillämpa. Efter att han tryckt på ”Fire” klockan 08:15 hör han en fruktansvärd smäll, men han var så koncentrerad att han inte minns om robotgruppcentralen vibrerade av tryckvågen. Efter att belysningsradarn tappat målet hade han ingen målspaning under hela tiden förutom de sista 15 sekunderna. Han genomför då den första och enda uppdateringen av robotens målsökare. När roboten närmade sig målet och stridsdelen skulle lösa ut hände inget. Ingemar kallar detta för sitt livs längsta sekund. Han hinner tänka att han är den förste i Flygvapnet som bommat, det blir inte bättre av att biträdande övningsledare Råneby, som står bakom Ingemar säger ”du har bommat”. Då kommer träffindikeringen och det var en skön stund.
I efterhand konstaterar man att bomavståndet var 2,4 meter och det räknas som en fullträff. Målet befanns sig på 10.000 meters höjd och roboten färdades 39 kilometer under 64 sekunder. Resterna av Ingemars målrobot finns utställd på Ängelholms flygmuseum.

Ingemar Thorsells skott med robot 4753.
Foto: RFN.

Ingemar Thorsells skott med robot 4753.
Foto: RFN.
Skott 3, 7/5 1971
Förutsättningarna inför Bo Lindbergs skott är att en J 32:a fäller ett remsor i ett stråk och en målrobot med störsändare går in i remsstråket. Hans Törnblom, FMV, var ansvarig för att beräkna exakt var remsorna skulle fällas så att de låg rätt mot målroboten. Rolf Nordström, ansvarig för robotens målsökare inom FMV berättar om den störmetod som kallas avhakare: ”Flygplanet som blir belyst har en radarvarnare som känner av att den träffas av en signal från belysningsradarn. Flygplanets motmedelsutrustning skickar tillbaka en stark signal som dränker flygplanets egna radareko. Robotens målsökare låser då på den starka signalen varefter signalen dras sakta ner i frekvens tills den motsvarar ett markeko. Målsökaren uppfattar då att målet har fart 0 och kan då inte låsa på målet utan tappar bort det.
När målsökaren låst på målet och robotstridsledaren ser den starka signalen i robotgruppcentralen så var motåtgärden att låsa upp målsökaren så att den starka signalen går förbi, sedan låser man på målsignalen igen och rätt eko hittas. Dessa falska signaler kunde komma i olika styrka och med ojämna mellanrum så robotstridsledaren måste vara mycket uppmärksam och handla snabbt”
Bo minns att när han tryckt på FIRE händer först ingenting, efter några sekunder lyfter roboten från lavetten och i kanske 2 sekunder vibrerar robotgruppcentralen kraftigt trots att den står i skydd bakom en hög jordvall. Under skottet registreras ett flertal störsignaler med ojämna mellanrum och Bo får som robotstridsledare blockera dessa. Detta lyckas han bra med och roboten träffar 5 meter vid sidan av målet. Målet befann sig på 5.100 meters höjd och roboten färdades 41,6 kilometer under 64 sekunder. Ledningscentralen på Punkt C bekräftade snabbt att träffen var ok.

Bo Lindbergs skott med robot 4752.
Foto: RFN.
Nu var uppdraget slutfört och inför hemresan skulle husmor på Punkt C avtackas. Göran Svensson beställde en spettekaka från Ängelholm som transporterades upp i en TP 84 Hercules (den hade dock annan last också).

Efter avfärd från Punkt C stannade man till vid Hotell Renkronan i Vidsel för att hämta upp officerarnas bagage.
Foto: Göran Svensson, F 10.

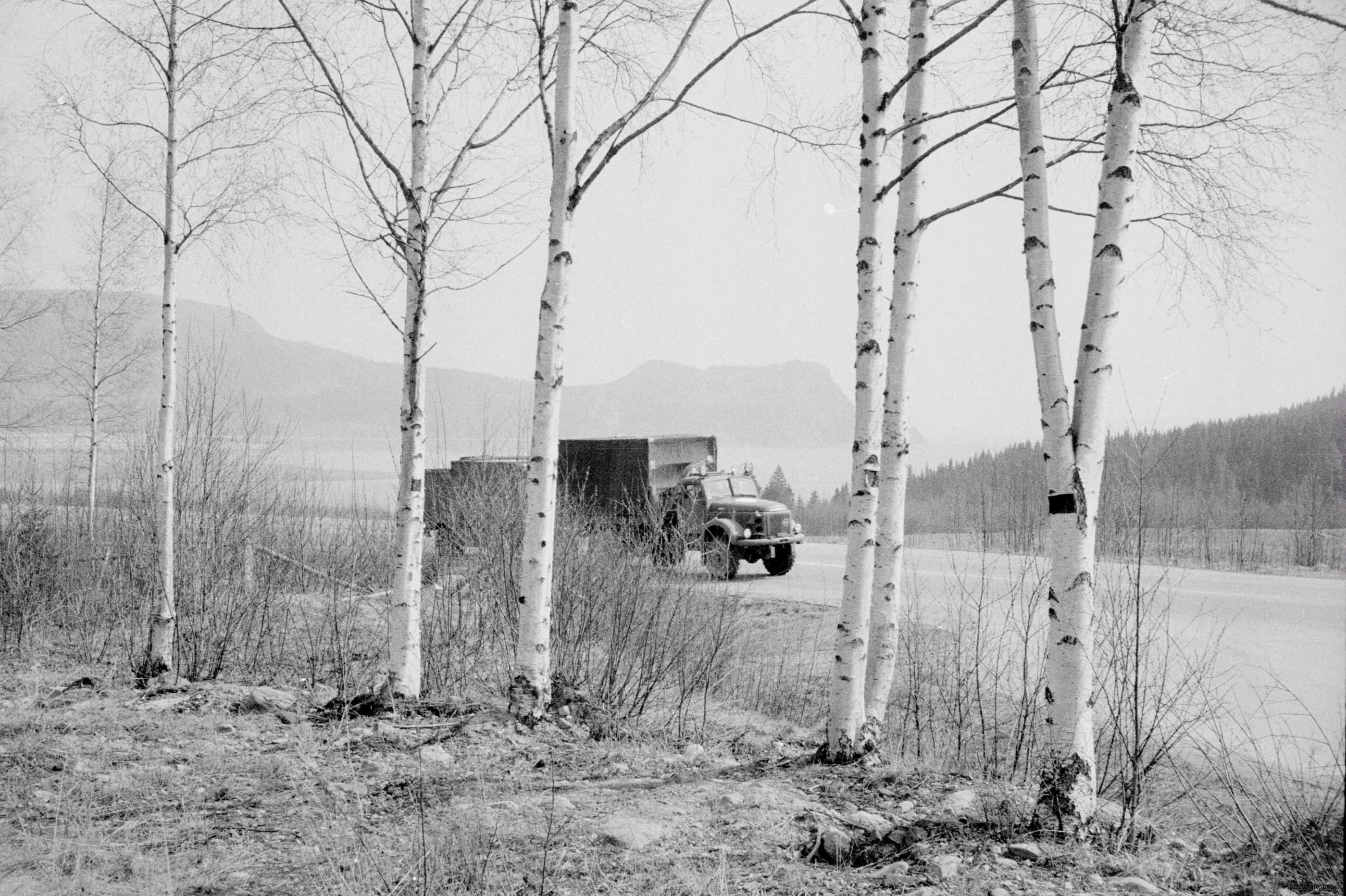
Robotlastbil med lavett passerar Skuleberget.
Foto: Göran Svensson, F 10.

Robotlastbil med verkstadsvagnen på släp, flaket är lastad med en kragg och luftkonditionsenheten till robotgruppcentralen.
Foto: Göran Svensson, F 10.
Lastbil med belysningsradar på släp.
Foto: Göran Svensson, F10.

Robotlastbil med robot.
Foto: Göran Svensson, F 10.
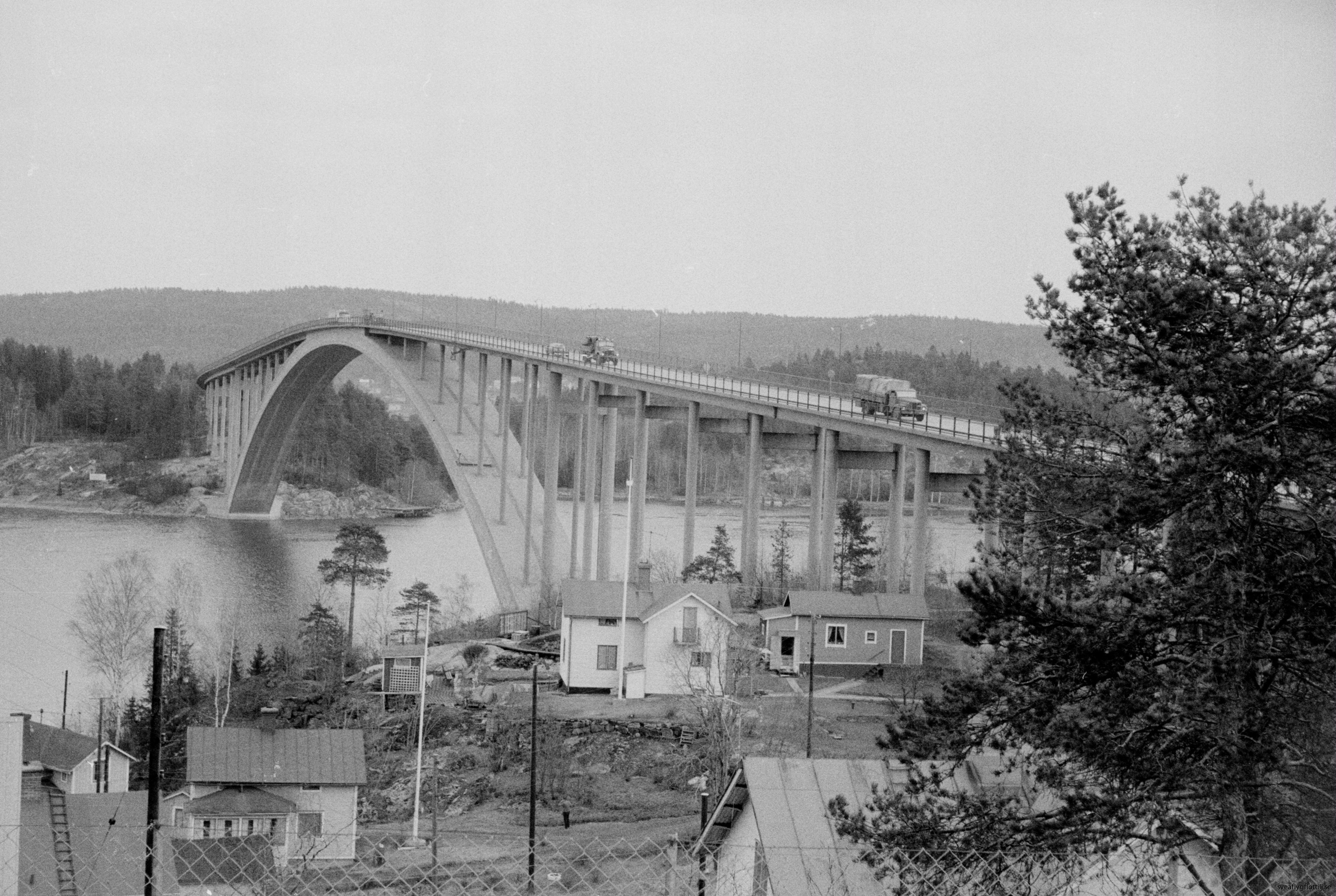
Delar av förbandet passerar över Sandöbron.
Foto: Göran Svensson, F 10.

Göran Svensson (närmast kameran) och Börje Hedberg befinner sig strax norr om Husqvarna och inväntar förbandets passage. Enligt uppgift ska dessa två varit ensamma i sin VW Variant så troligen är denna bild tagen med självutlösare. Därmed blir Göran Svensson fotograf även på denna bild.

Förbandet på E4 norr om Husqvarna. Man kan konstatera att det inte var så tät trafik vid detta tillfälle.
Foto ovan + de fem nedan: Göran Svensson, F 10.





Äntligen hemma på F10!
Jag (Håkan Wall) vill tacka alla som bidragit till att göra denna berättelse verklig. Ett extra stort tack till Göran Svensson som såg till att dokumentation och foton sparades till eftervärlden.
Det är tack vare detta samt alla telefonsamtal med Göran som berättelsen håller ihop.