Författat av Håkan Wall.
Syftet med detta stycke är att ge en kort beskrivning av utveckligen som slutade i Bloodhound Mk II (robot 68).
Därefter kommer Bloodhound Mk II i tjänst hos RAF beskrivas översiktligt.
Texten i detta stycke är en sammanfattning av en text författad av Richard Vernon som vi, mycket tacksamt, fått ta del av. Richard tjänstgjorde fyra år på Bloodhound i West Raynham, England, och har en djup och grundlig kunskap om systemet och dess historia.
Från idé till Mk II.
Utvecklingen av Bloodhound började 1949 när Bristol Aeroplane Company och Ferranti fick i uppdrag av Ministry of Supple att ta fram en markbaserad robot mot luftmål. Under kodnamn RED DUSTER påbörjades 1951 en fullskalig utveckling av en ramjetdriven robot. Problem med att få fram startraketer medförde att projektet försenades till 1955. Prototypen visade sig inte klara de ställda höjdkraven. Vikten måste reduceras, så en ny lättare modell togs fram och därefter påbörjades provflygningar vid skjutfältet Woomera i Australien, dessa pågick fram till 1960.
Redan 1956 hade man bestämt sig för att systemet skulle skapa en defensiv barriär från Humber till Themsen, vilket innefattar en stor del av Englands ostkust. Radarutrustning och 800 robotar beställdes i slutet av 1956 (hur många robotar som slutligen levererades är oklart). 1957 ändrades planen till att istället inrätta ett punktförsvar för flygbaserna med de strategiska bombplanen. Namnet var nu ändrat till Bloodhound och modellen kallades Mark I (i Sverige kallade vi den robot 365).
Systemet togs i drift 1960-1961. 440 robotar tilldelades robotskvadronerna. 1964 avvecklades den sista skvadronen och Mark I gick i graven. Övningskjutningar med Mk I pågick från 1959 till 1963. Totalt 183 robotar avfyrades och de lyckade skotten uppgick till 38%.
Ett ersättningssystem började planeras redan 1955, ett projekt som kallades BLUE ENVOY påbörjades. Denna robot skulle se ut som en korsning mellan en Bloodhound och en SAAB 35 Draken. Det blev dock för dyrt och arbetet avbröts 1957. Då föreslog Bristol och Ferranti en ”Super-Bloodhound” som kallades Bloodhound Mk III, även detta projekt avbröts.
Under tiden pågick utvecklingen av Mk II, för att få ner kostnaderna använde man samma bakkropp som
Mk I. Sedan skapade man ny längre framkropp som rymde mer och modernare elektronik, nya ramjetmotorer och nyutvecklade startraketer och där var Mk II född. Den var tåligare, snabbare och mer pålitlig. När systemet sedan kompletterades med en bättre radar och en stridsledningscentral utrustad med en datamaskin blev det jackpot. Dessutom kunde man välja mellan två olika radarstationer, en rörlig, TYPE 86 TIR, och en fast radarstation, TYPE 87 TIR, som vägde 50 ton. 87:an hade en längre räckvidd än 86:an. RAF använde bägge typerna, Sverige endast TYPE 86 och Schweiz endast TYPE 87.

MK II under tillverkning i fabriken. Totalt tillverkades 691 robotar mellan februari 1963 till december 1967.
Foto: via Arboga Robotmuseum.
Bloodhound Mk II i RAF.
RAF hade ett stort antal Bloodhound MK I, totalt 440 robotar. Dessa fördelades på elva stycken ADM-squadrons (Air Defence Missile). Dessa allokerades till fyra stycken flygflottiljer. Bloodhound I försvarade bl.a nio stycken klass A flygfält samt ett flertal viktiga platser. Verksamheten pågick mellan 1959 – 1964.
Som ersättare för detta system valde man Bloodhound MK II, 357 robotar tillverkades till RAF. Dessa fördelades på ett antal skvadroner. Alla skvadroner fick två robotar per lavett + 10 % beräknad på förbandets totala antal tilldelade robotar. Övriga robotar hölls i reserv för provskjutningar och som ersättningsrobotar för de robotar som förbrukades vid övningsskjutningar.
Här kan vi notera några skillnader mot Sverige. Några övningsskjutningar för att personalen skulle träna förekom aldrig. De kontrollskjutningar som genomfördes var en bra träning för personalen, givetvis, men det var inte huvudsyftet. Våra förband hade två robotar per lavett, därutöver fanns 20 robotar som var avsedda för kontrollskjutning.
I England hade man fasta och utplacerade enheter. En fast enhet hade sin fasta plats och var utrustade med belysningsradar Type 87 TIR och åtta lavetter. En utplacerad enhet kunde skickas runt till olika platser, denna enhet hade en belysningsradar TYPE 86 TIR (samma som vi i Sverige hade) och fyra lavetter. Att enheten var utplacerad innebar att den var flyttbar, dock inte rörlig som de svenska förbanden. En förflyttning skedde till att en början med en kombination med sjötransport och flygtransport. Senare kunde en flytt ske enbart via luften. Första gången en utplacerad enhet flyttades var till Borneo 1966 under en konflikt mellan Malaysia och Indonesien.
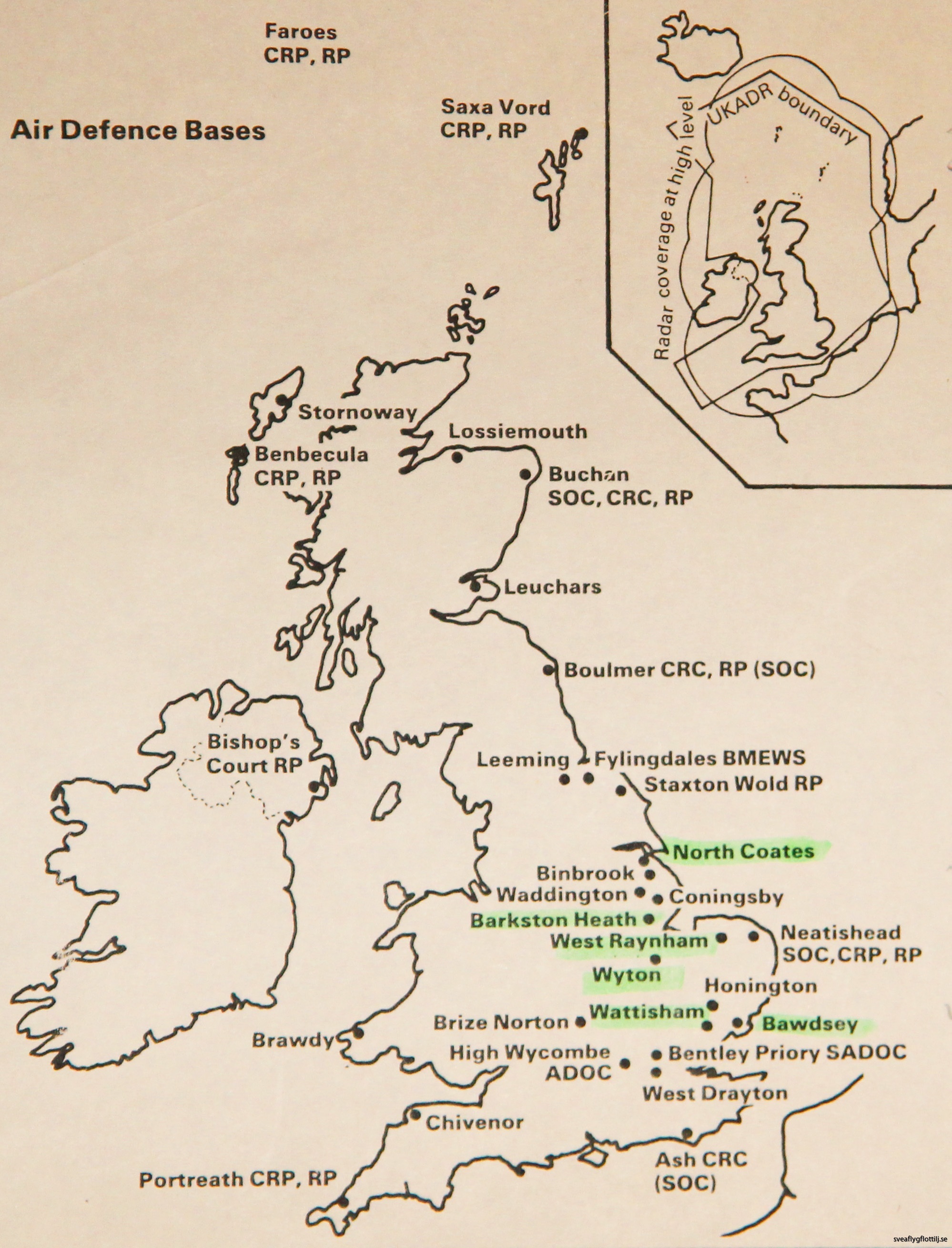
Vid de grönmarkerade flygbaserna har Bloodhound MK II
varit stationerade.
Bild via Arboga Robot-
museum.
Förutom i Storbritannien fanns förband vid olika tidpunkter placerade i Singapore, Malaysia, Cypern och Västtyskland. Man gjorde även ”övningsförflyttningar” till Malta och Libyen.
Ett politiskt beslut 1967 innebar att man avvecklade verksamheten öster om Suez, man lämnade därmed Malaysia 1970 och sålde anläggningar och material vid Seletar till Singapores flygvapen 1971.
Efter 1969 omorganiserade man förbanden till två skvadroner med sex utplacerbara enheter som skulle baseras på West Raynham och dessutom planera för beredskapsplaner för utlandet. Det var nu som placeringen skedde i Västtyskland på grund av dålig luftförsvarstäckning över Centraleuropa. Placeringen skedde på tre RAF baser, Brüggen, Wildenrath och Laarbruch som alla ligger mellan Düsseldorf och gränsen mot Nederländerna. Verksamheten pågick mellan 1970 -1983.
1971 koncentrerades alla återstående Bloodhoundresurer till West Raynham och de bildade Bloodhound Support Unit som supportade verksamheten i Västtyskland och Cypern. Placeringen i Västtyskland var speciell på det sätt att ingen serviceverksamhet fanns tillgänglig på plats. För att få sin återkommande service fick robotarna flyggas över till England.
Planerat slutdatum för Bloodhound Mk 2 systemet var satt till 1985. Systemet livstidsförlängdes till 1992 genom förvärv av surplusmaterial från armen samt att de tidigare sex förvärvade belysningsradarstationerna av TYPE 86 samt de 66 robotarna från Sverige kunde tas i bruk (läs mer om detta under stycket ”Försäljningar”). TYPE 86 ersatte alla TYPE 87 enheter. I LCP (launch control post = robotgruppcentral på svenska) installerades ett nytt dator- och displaysystem som kopplades samman med ett datoriserat ledningssystem.
1989 lades de två skvadronerna samman till en skvadron och efter Berlinmurens fall gick det sedan snabbt till total avveckling, efter sommaren 1991 var all verksamhet avslutad.

Bild ovan samt de två nedan visar en RAF gruppering på okänd plats. Samtliga robotar står på markplåt så detta bör vara en utplacerad enhet.
Foton via Arboga Robotmuseum.


Jultomten testar ett alternativ till sin rensläde.
Foto är taget på en okänd Bloodhound-skvadron vid en okänd tidpunkt.
Foto via Peter Murray, BMPG.

RAF Aberporth test range.
RAF Aberporth test range.
Denna provplats ligger på en udde i Irländska sjön strax utanför Cardigan. Här avfyrades 87 stycken
Mk II robotar mellan juni 1966 till november 1986 och 70 % av dessa noterades som träff. Även Schweiz genomförde skjutningar härifrån.

Robot på lavett. Notera att schackmönstret på motorerna är helt annorlunda än vid svenska kontrollskott. Här har mönstret stora rutor medan
det svenska mönstret innehåll många små rutor.
Foto via Arboga Robotmuseum.

Ett robotskott på Aberporth.
Foto via Arboga Robotmuseum.

BL- 64 från Schweiz på plats i Aberporth 1986. Detta är den svenska robotindividen 2721 som i Schweiz fick individnummer 3726. Skottet avlossades den 3/10 1986 mot en Jindivik målrobot och med ett passer-avstånd på 20 meter räknas det som en träff.
Foto via Arboga Robotmuseum.