Robotgruppcentral (Rbgc)
Författat av Håkan Wall.
Det fanns 12 stycken rbgc i Sverige. De hade individnummer 1001 – 1012 och fördelades på förbanden enligt nedan:
F 8: 1001, 1002, 1003, 1004
F 10: 1008, 1011
F 12: 1009, 1012
F 13: 1005, 1006
F 17: 1007, 1010
Individnumren för rbgc var sammankopplade med individnumren för belysningsradarna (brr). Rbgc med individnummer 1001 fanns på samma förband som brr 501, liksom 1002:an och 502:an o.s.v. Vagnarna var specialbyggda för svenska förhållanden då Sverige var det enda land där systemet var mobilt. I övriga länder fanns motsvarande funktioner i olika lösningar t.ex. i Schweiz i en fortifikatoriskt skyddad anläggning.
Som lite kuriosa har vi några fordons militära registreringsnummer: 1007 / reg. nr 128569, 1009 / 129606, 1010 / 133770, 1011 / 133804 och 1012 / 133853.

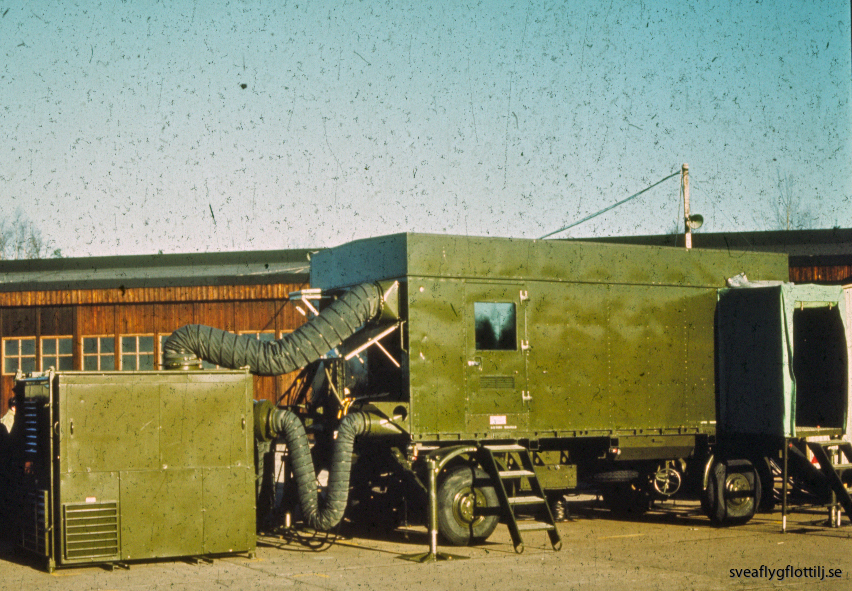
Rbgc med luftkonditioneringsaggregat uppställt på banände 21 på F 8. Här stod utrustningen uppställd inför pressvisningen 1965. Notera mängden med kablar.
Bild via Cleive Hornstrand.
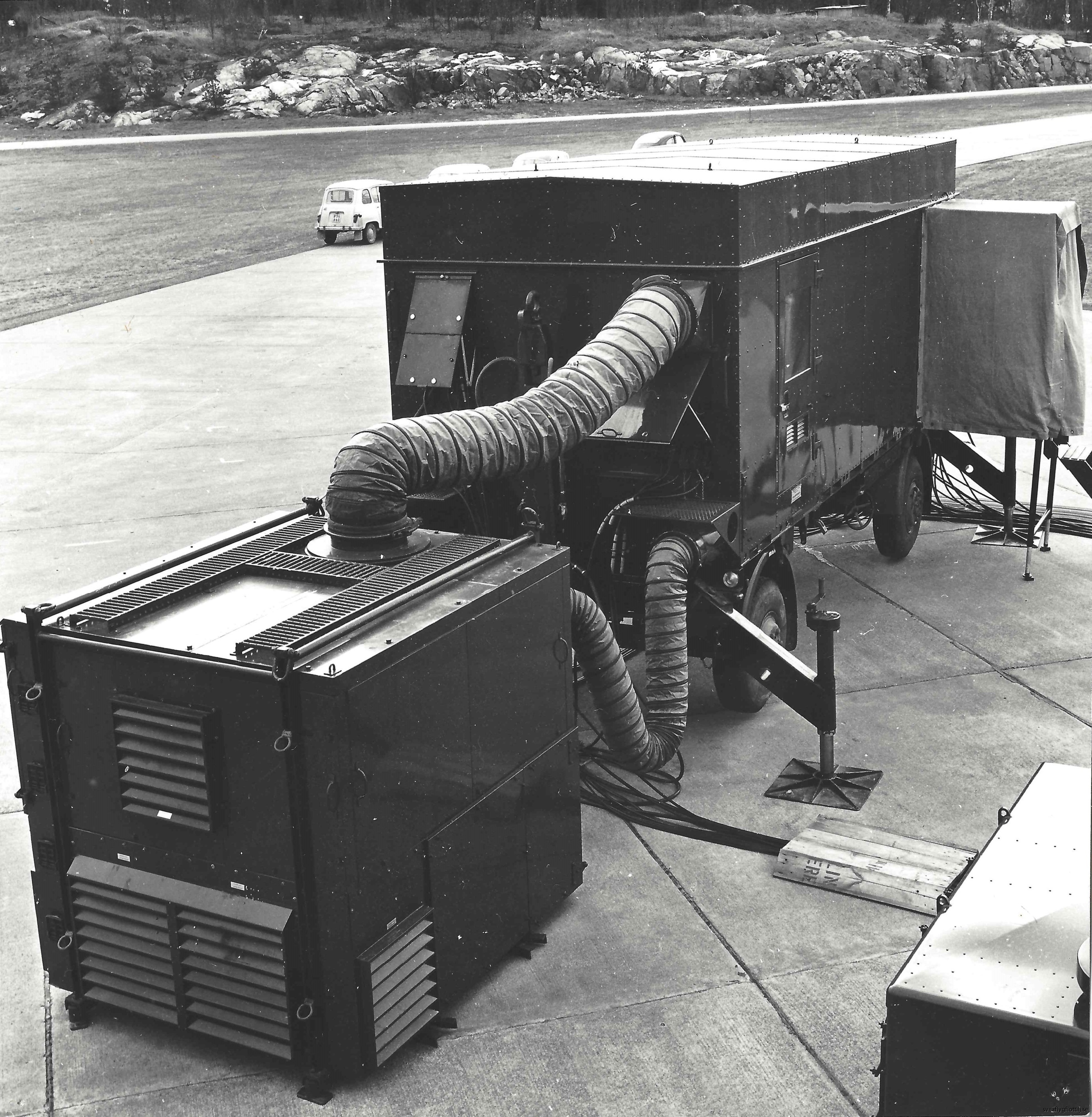
Rbgc med luftkonditioneringsaggregat uppställt på okänd plats.
Bild via Arboga Robotmuseum.

Rbgc vid Telub, till vänster skymtar en brr. Bild via Arboga Robotmuseum
En robotgruppcentral har till uppgift att;
- Fjärrstarta och kontrollera hydraulsystemet i lavett och robot.
- Fjärrstyra brr samt överför lamp-ordersignaler och data till brr.
- Överföra till, samt ta emot data från Lfc med 100-meddelanden via radiolänk. (100-meddelanden var den första generationen av digital överföring).
- Förinställa rmålsökarens antenn före avfyring.
- Fjärrstyra lavett för att ge roboten rätt utgångsbäring.
- Beräkna träfftidpunkt.
- Skicka impulser för att starta roboten.
- Utföra all nödvändig databehandling för inställning och kontroll av målsökarantennen, lavettens sidvinkelläge, beräkna dopplerfrekvens, välja flygprogram m.m.
- På indikatorer visa nödvändig information för robotstridsledaren (rbstriled) och systemövervakaren (sövak).
- Leverera avfyringsspänning till robotarna samt skyddskretsarna.
- Att utföra vissa funktionstest i rbgc samt simulering av brr.
- Att utföra klargöring av lavett och robot.
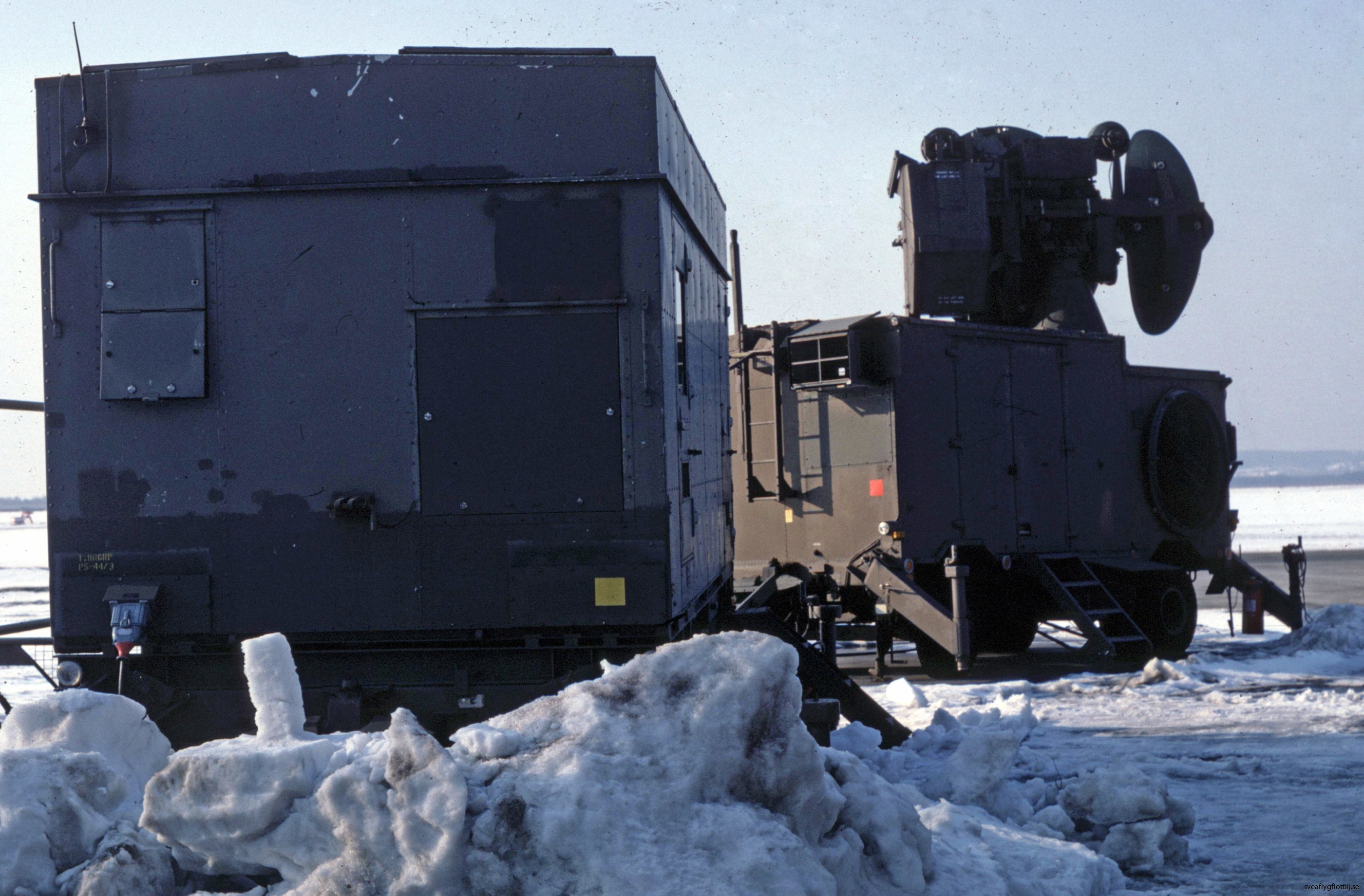
Rbgc är förbandets stridsledningscentral och härifrån leder rbstriled förbandet i strid. Här tjänstgjorde två man, rbstriled och systemövervakare (sövak). Den är inrymd i ett fyrhjuligt släpfordon med fyra kraftiga stödben. Som dragfordon används terränglastbil 941, en sexton-växlad Volvolastbil, men vi har sett bilder på att man ibland även använder robotlastbilarna som dragfordon. Vagnen är 5,63 m lång, 2,43 m bred och höjd utan hjul är 2,48 m. Vikten är ca 7 ton. I vagnens bakände finns anslutningsdon för kablage och i framändan ansluts ett separat luftkonditioneringsaggregat och en motorgenerator. Dessa väger ca 3 resp. 1,5 ton. Två stycken entrédörrar finns, en längst fram med fönster för rbstriled samt en längst bak med tillhörande plattform och ljussluss. Båda dörrarna återfanns på fordonets vänstra långsida.
Rbgc med luftkonditioneringsaggregat uppställt på banände 21 på F 8. Längst ner till höger skymtar motorgeneratorn.
Bild via Cleive Hornstrand.
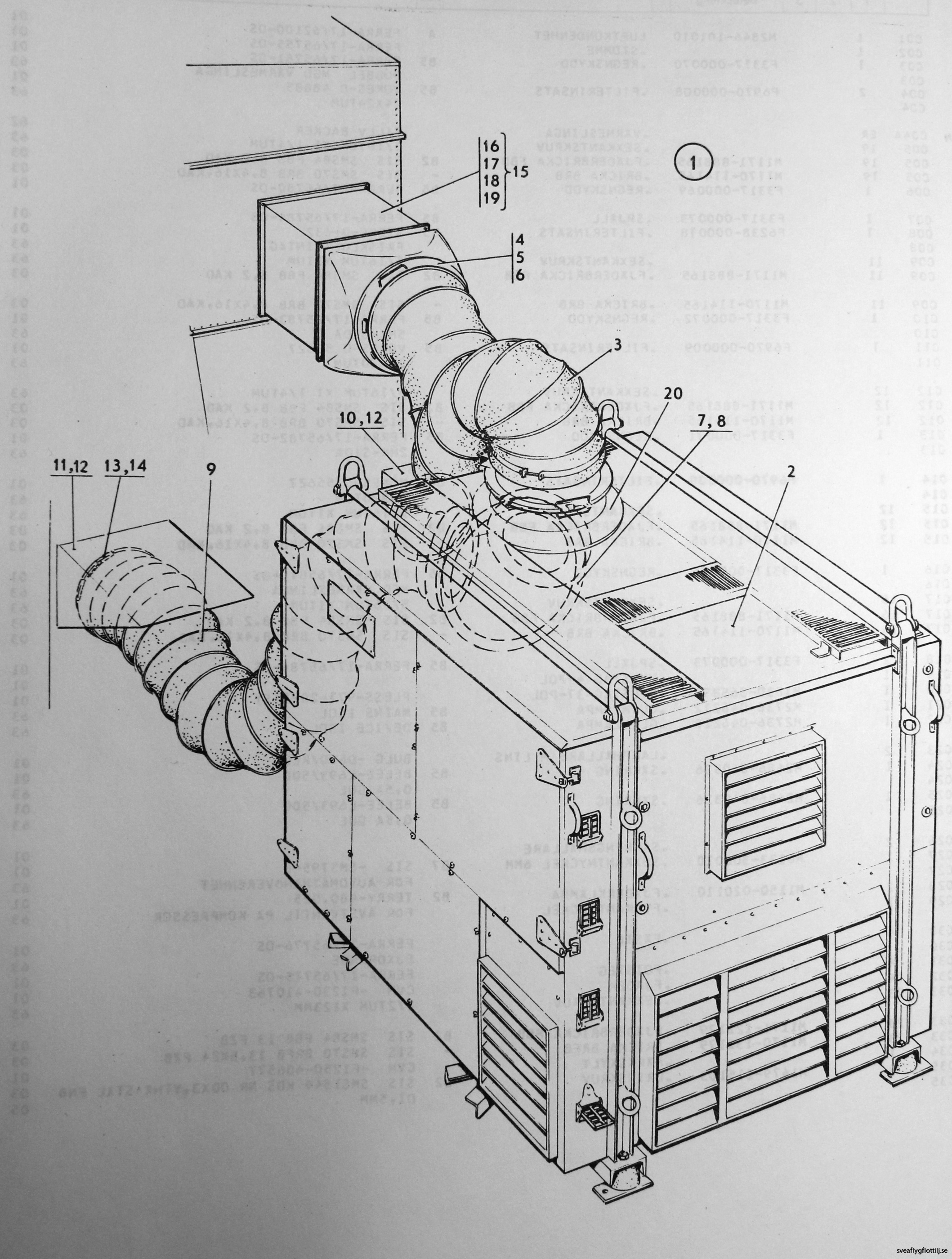
Skiss över luftkonditioneringsaggregat.
Bild via Arboga robotmueum.

Från vänster rbgc,luftkonditioneringsaggregat och motorgeneratorn, ovanpå denna ligger dess lyftok.. Bilden är tagen på punkt C 1971.
Foto; Göran Svensson F 10.

Kraftfördelningsenheten och luftkonditioneringsaggregatet lastat på en robotlastbil.
Bild via Arboga Robotmuseum.

Tekniker från Telub anländer till en rbgc, troligen på Telubs testplats i Risinge. På bilden ser vi från vänster: luftkonditioneringsaggregatet, rbgc, okänd enhet samt kraftaggregat. Mellan rbgc och den okända enheten, precis över duettens tag skymtar vi motorgeneratorns lyftok.
Bild via Arboga Robotmuseum.

I förgrunden syns anslutningar och slangar för luftkonditioneringen. Man ser även bägge dörrarna. Bild via Arboga Robotmuseum.

Lars Ilstam och Eve Andersson bär in en enhet i rbgc.
Foto via Conny Karlsson.
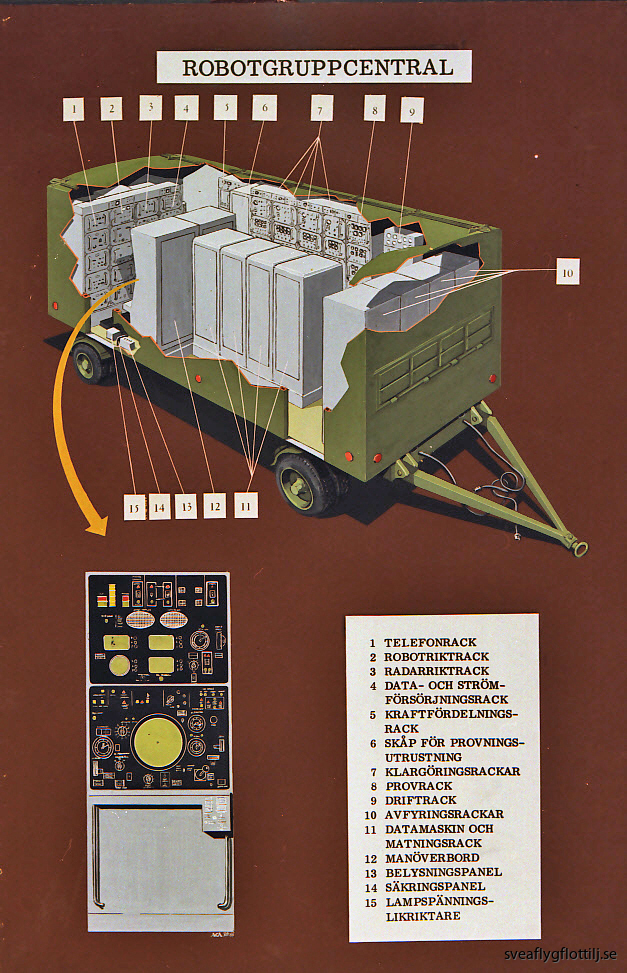
Inuti kabinen är utrustningen samlad i rackar som täcker bägge kortväggarna och höger långsida. På den främre kortsidan står telefon-racken (S-racken), omvandlar-racken (D), länk-racken (L) och data- och strömförsörjnings-racken (R). På höger långsida står kraftfördelnings-racken (Z) samt luftkonditioneringens reglersystem för temperatur och luftfuktighet, fyra stycken klargörings-rackar (PA-PD), prov-racken (T), och slutligen drift-racken (F).
Fyra stycken avfyrings-rackar är placerade utmed den bakre kortsidan (MA-MD). Totalt innehåller denna utrustning ca 250 kretskort av ca 100 olika typer. Mitt i kabinen står tre stora data-rack (A1-A3) samt matnings-racken (O). Datamaskinen innehåller omkring 1.000 kretskort av ett sjuttiotal olika typer. På dessa kretskort finns bl.a 8.000 transistorer och 20.000 halvledardioder, (datamaskin var vid denna tidpunkt det ord som användes för en dator så vi har valt att använda detta utryck genomgående).
All utrustning var ”mycket brittisk”, alltså inte så praktisk. T.ex. var luftkonditioneringen i rbgc placerad så att rbstriled fick all kalluft i nacken. Därför var man tvungna att ha halsduk vid tjänst i rbgc berättar Bo Lindberg, F10. Lars Gröön, Telub/FMV berättar att kylluften blåstes in i samtliga stativ och läckte ut på framsidan av alla stativen, även de bakom manöverborden. Tanken var väl att elektroniken skulle värma upp luften, men det var alltid dragit.
Rbgc får sin strömförsörjning från kraftaggregaten via kraftfördelningsenheten, härifrån erhålls 415 V, 50 Hz. Kraftfördelningsenheten är en separat enhet som placeras intill kraftaggregaten. Exakt vikt har inte gått att få fram men ett par ton bör den väga. Elgoner, avfyringskretser och datamaskinen behöver dock 400 Hz, därför finns en separat motorgenerator i anslutning till rbgc. På Z-racken sitter säkringar, mätare och indikeringslampor för strömförsörjningen.
Sprängskiss av Rbgc.
Bild via Arboga Robotmuseum.
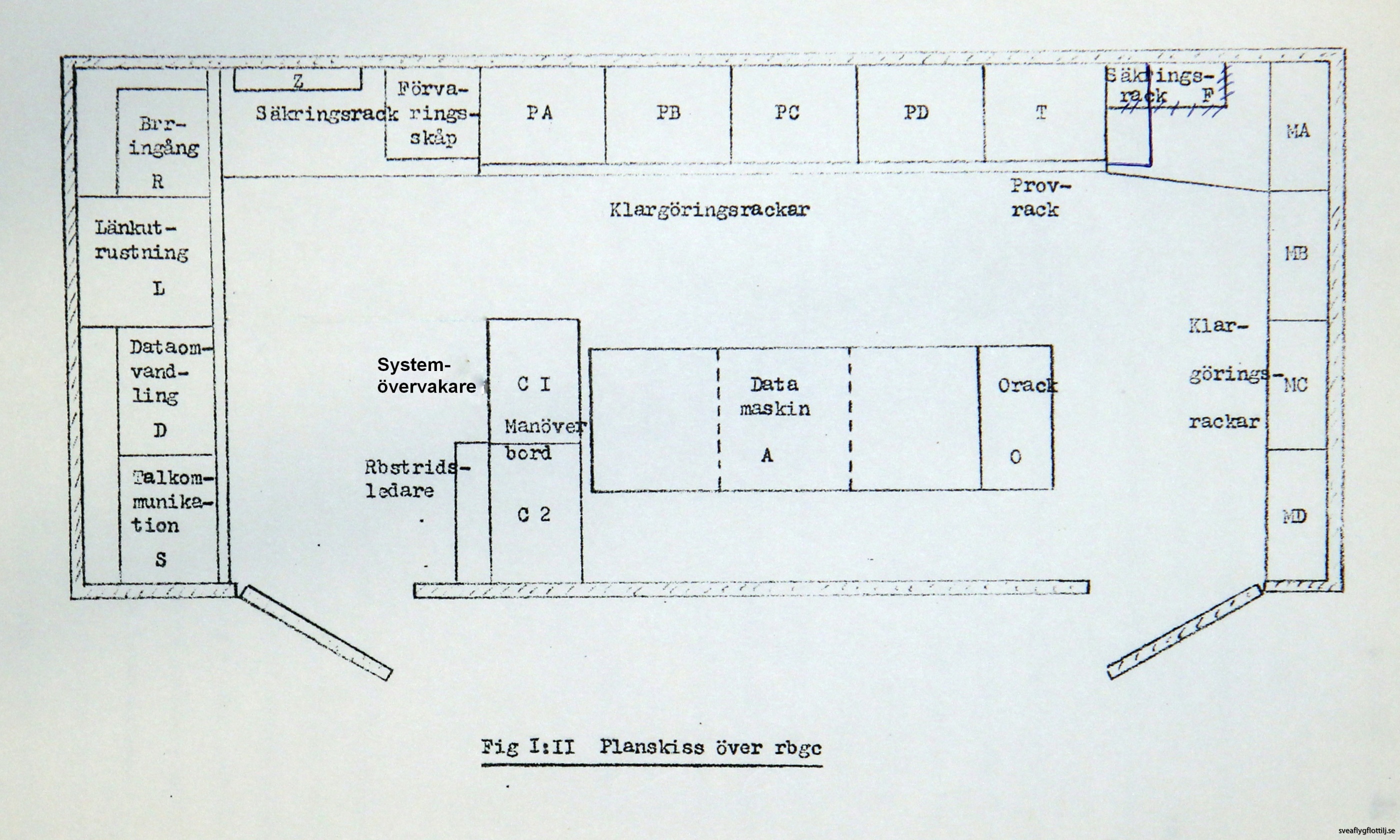
Planritning.
Bild via Nils Olof Karlberg.
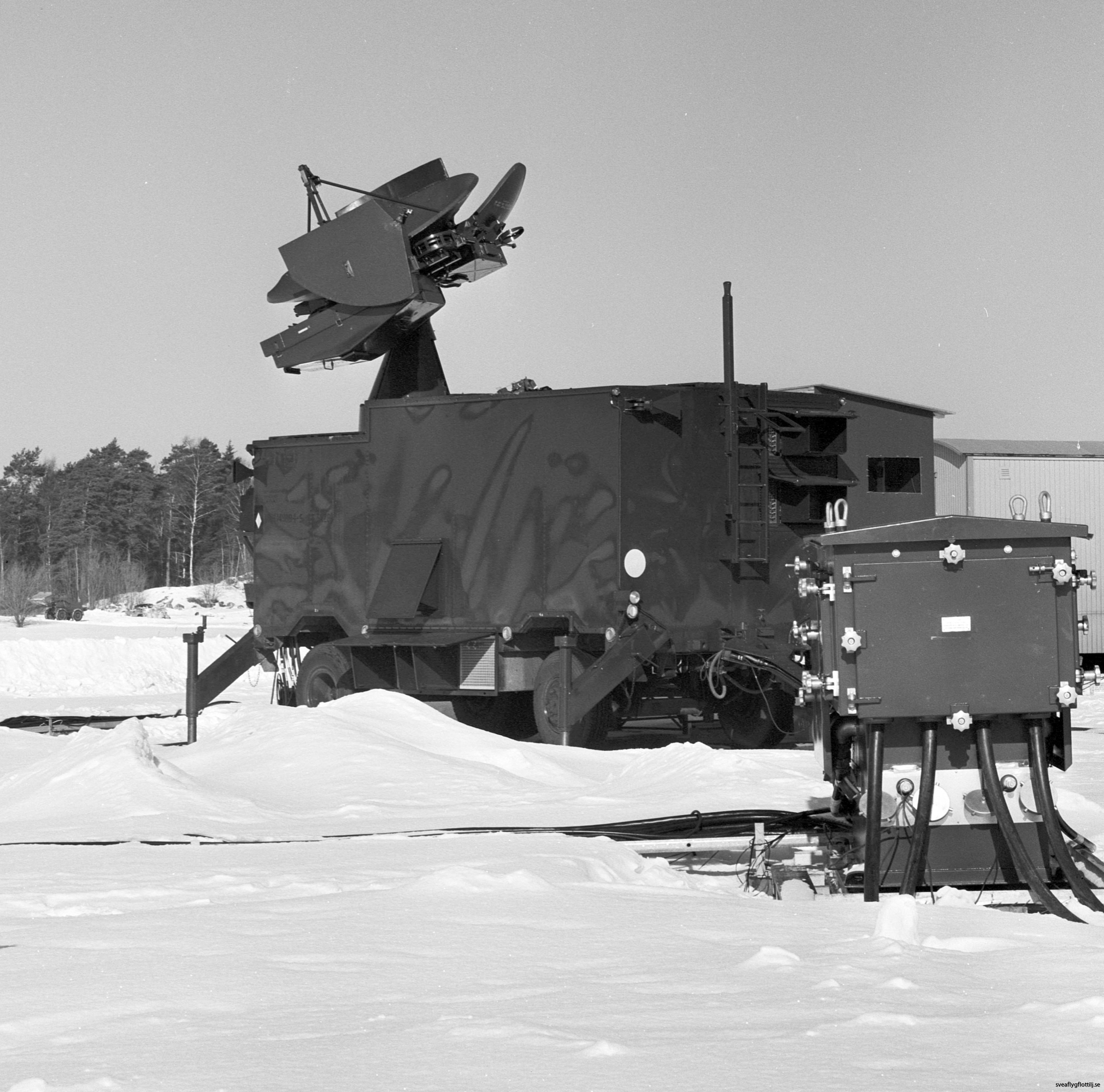
Till höger står kraftfördelningsenheten, i bakgrunden en brr. Bilden tagen på banände 21 på F 8 i mars 1965.
Foto via Flygvapenmuseum.
Manöverbord
De två manöverborden är placerade i den främre delen av kabinen med baksidan mot den främsta data-racken. För att starta upp rbgc slår man till kraften med huvudbrytaren och brytare för de olika stativen på Z-racken, därefter trycker man på knappen LCP/COMP ON som sitter på manöverbordet (på engelska heter rbgc Launch Control Post). Den övre delen av knappen tänds när rbgc är i gång och den undre när datamaskinen startat.
Med knapparna till höger,10 MIN/ 1 MIN/ ON, väljer man beredskapsgrad. För att starta robotarna och lavetter behöver först en omkopplare på sövaks manöverbord slås till, under klargöringsstaplarna för varje robot sitter omkopplaren OFF/CHECK/SELECT, för att kunna avfyra väljs SELECT. Rbstriled väljer nu MISSILES ON och de robotar och lavetter som står i läge CHECK eller SELECT startas med 4 sekunders intervall mellan varje robot.
På manöverbordet finns signallampor som indikerar order från lfc eller ger upplysningar av olika slag från robotgruppens enheter. En gul lampa (ACQUIRE) lyser när dataförbindelse är etablerad med lfc, om förbindelse saknas tänds en röd varningslampa istället (NO-CO).

Bilden tagen i rbgc, närmast är systemövervakarens manöverbord och längre in robotstridsledarens. Eftersom det bara var Sverige som hade rbgc i vagn vet vi att denna är svensk, dock är personalen engelsmän, troligtvis är bilden tagen under utprovning i England.
Bild via BMPG (BloodhoundMissilePreservation Group), England.

Vem mannen till höger är vet vi inte, det kan vara en engelsk tekniker som provar utrust-ningen efter ankomst till F 8.
Bild via Krigsarkivet.

Mannen till höger på denna bild är Christer Köhler, robotstrids-ledare på F 8, som deltar vid prov av utrust-ning vid ankomst till F 8.
Bild via Krigsarkivet.
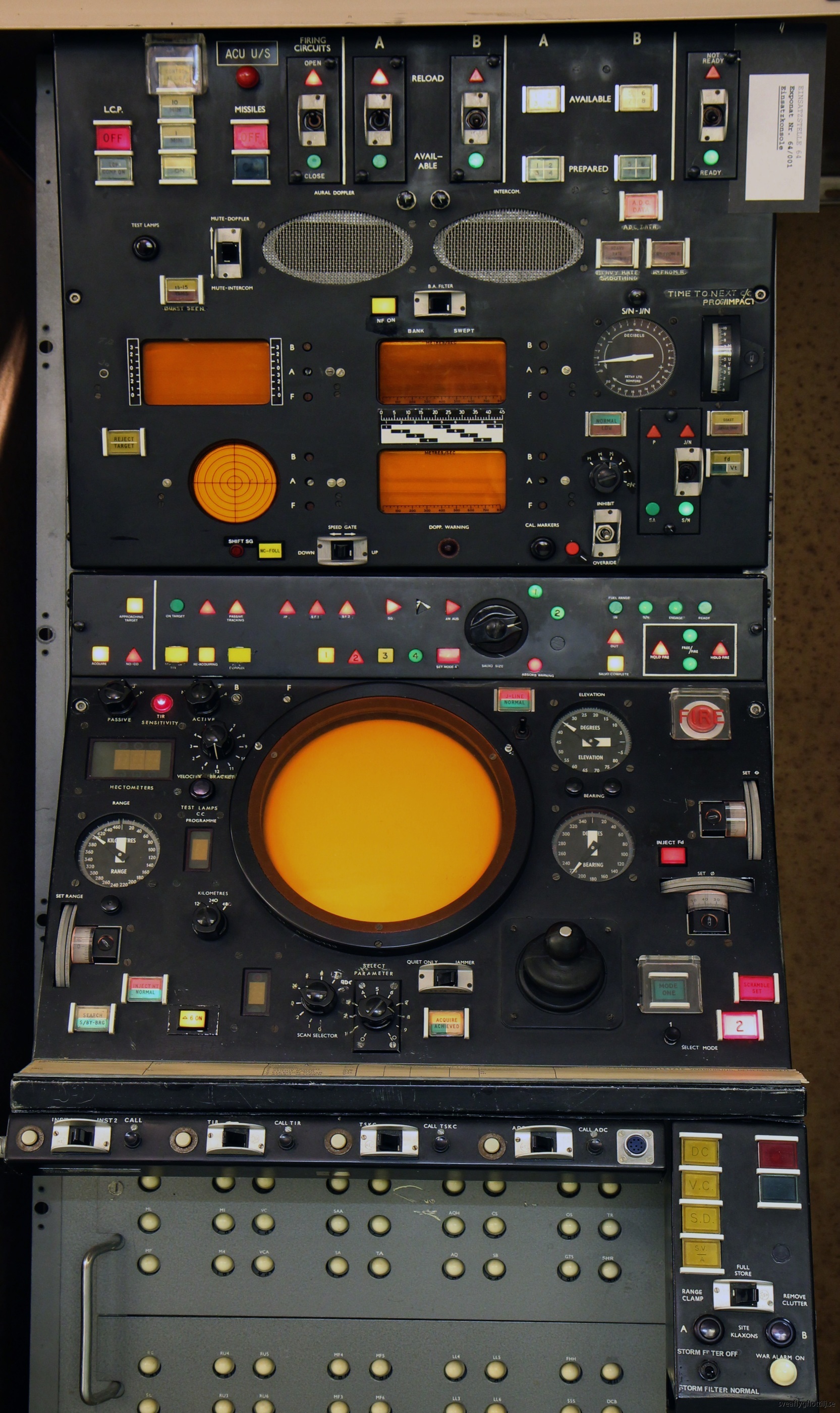
Robotstridsledarens manöverbord. Den grå enheten med gula lampor längst ner är en signalreläenhet.
Foto: Håkan Wall.

Övre delen av manöverbordet. Längst upp till vänster ON/OFF-knappen, därefter val av beredskap samt robotar ON/OFF. I mitten högtalarna och under dessa de fyra indikatorerna.
Foto: Håkan Wall.
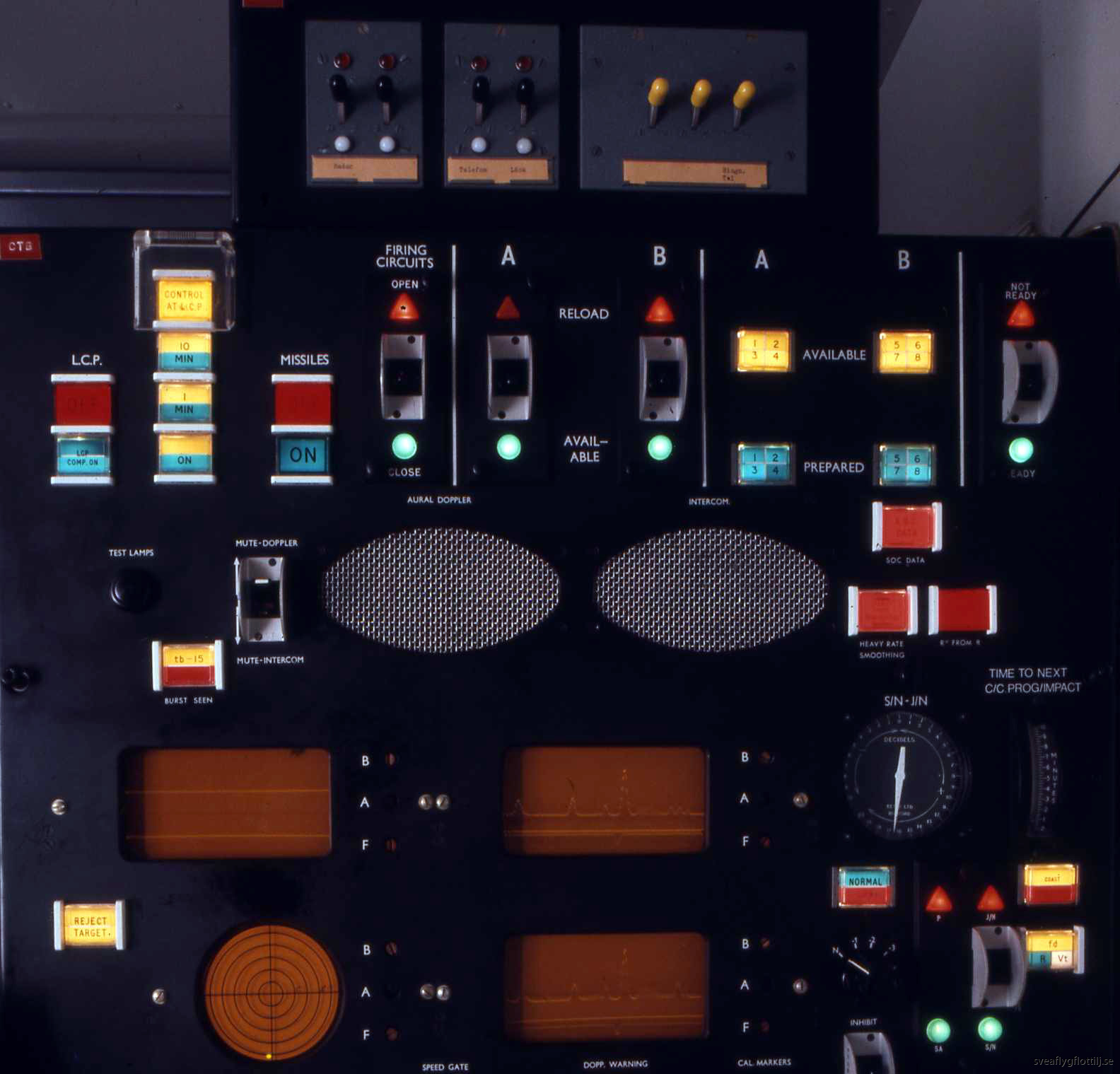
En unik bild från tiden när det begav sig. Här ser man att rbgc är uppstartad, lampor lyser samt information visas på indikatorerna.
Foto via Dag Malmströms samlingar.
Panelen på systemövervakarens manöverbord.
Digital bild framställd av Richard Vernon, BMPG, England.

Varnings- och informationslampor.
Foto: Håkan Wall.

Samma panel som ovan fast i form av en digital bild framställd av Richard Vernon, BMPG, England.
Uppstartnings- och klargöringssekvensen
Sövaks uppgift inför avfyring var att starta och övervaka klargöring av lavett och robot, klargöringen tog 60 sekunder. På de övre staplarna visas robotklargöringen, en stapel för varje robot. Klargöringssekvensen startar upptill och går nedåt, när hela stapeln är grön är roboten klargjord. Under klargöringen sker bl.a. tillförsel av kraft, hydraultryck och kylluft, uppstart av gyron, förinställning av dopplerföljningskrets, inriktning av lavett och robotens parabol. Dessutom sker beräkning och förinställning av flygprogram. Hos robotstridsledaren indikeras målläge, målfart, beräknad träffpunkt, valt flygprogram samt eventuella störningar.
Innan klargöringen startas måste en manuell klargöring av robotmottagaren göras. Där justeras mottagaren till belysningsradarns bärfrekvens. Robotmottagaren måste även före avfyringen ha en dopplerförinställning som gör att den låser på målet efter raktetfasen. Beräkning av dopplerfrekvensen sker i datamaskinen och inställningen överförs till robotmottagaren via brr:s markreferensantenner till lavettens markreferensantenn.
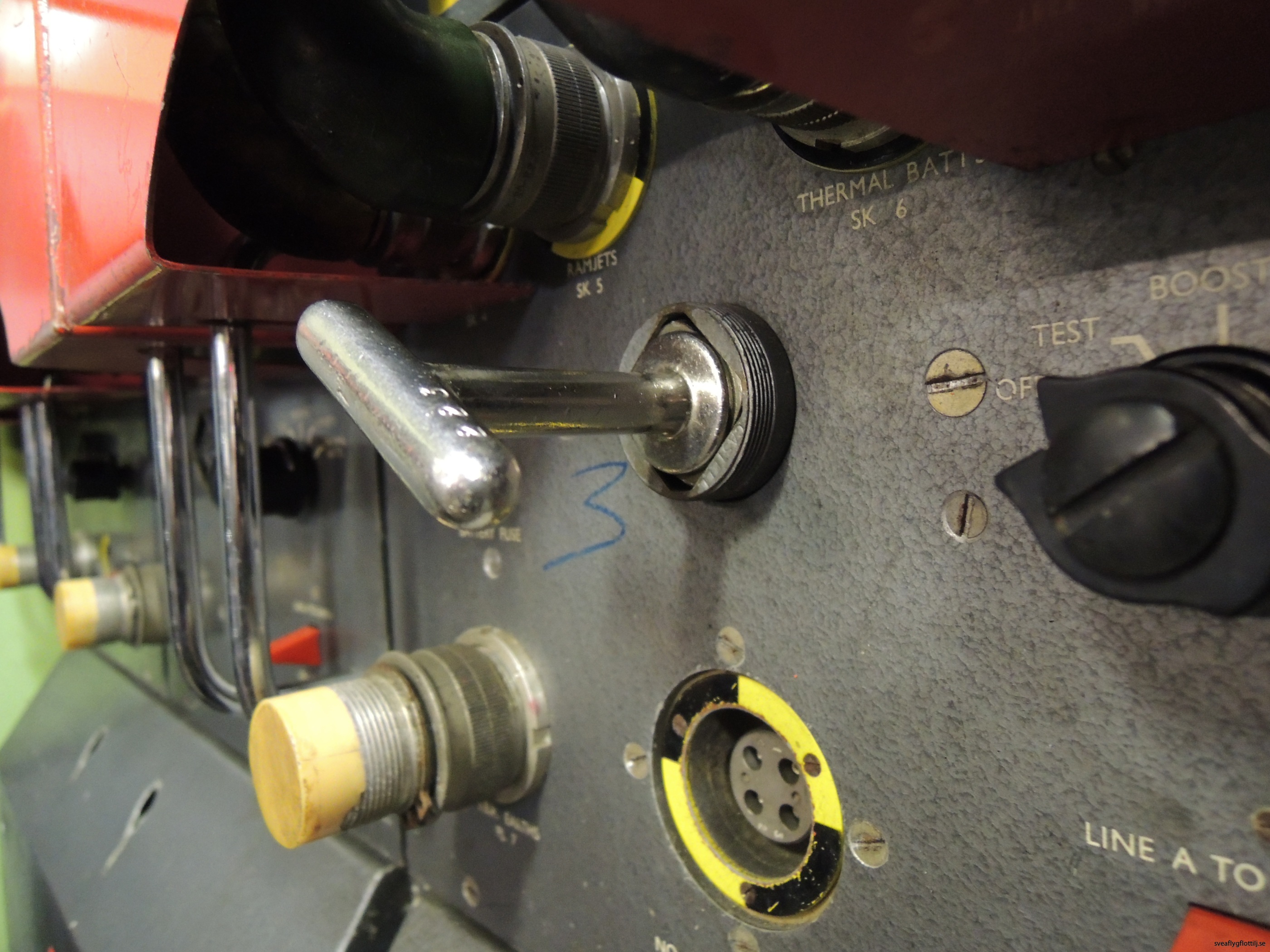
Uppstart samt klargöring av lavett och robot styrs av en sekvenskopplare, den består av en 60-lägesomkopplare som på impulser från tidgivaren stegar fram ett läge varje sekund. Vissa stadier av klargöringssekvensen indikeraspå sövaks manöverbord (staplarna). Nedan följer en kortfattad redogörelse för åtgärderna vid de olika lägena, lägen där ingen åtgärd sker är utelämnade.
Läge 1. Start av lavettens motor.
Läge 2. Kontroll av termobatteriernas tändledning.
Läge 3. Robot-strömsförsörjningsenhet till.
Läge 4. Startspänning av gyron
Läge 6. Kontroll av robot-strömförsörjningsenhetens utspänningar.
Läge 10. Öppna referensskyddsdämparen.
Läge 16. Om brr sänder ges signalen WARM UP AFC.
Läge 23. Tryckvätska för robot till.
Läge 43. Signalen WARM UP DOPPLER ges (dopplerkrets uppvärmd)
Läge 44. Startspänning för gyron slås av och drivspänning slås till.
Läge 45. Låskolven i referensgyrot tas bort.
Läge 46. Öppna målskyddsdämparen.
Läge 47. Signalen SEQUENCE-COMPLETE ges (klargöringssekvens avslutad).
Här markeras klargöringen klar (Läge 48-60 används för återställning om roboten inte ska avfyras). Om det inte blir grönt så måste detta undersökas och åtgärdas innan roboten kan användas. Istället påbörjas klargöring av en annan robot. För att en robot ska vara klargjord ska nedanstående punkter uppnås:
- Tillslagssekvensen för roboten är helt klar (de gröna lamporna).
- Målsökaren har låst till rätt brr.
- Frekvensdriftshastigheten i målsökaren är minskad till ett godtagbart värde.
- Antenntippgivaren i rbgc följer korrekt.
- Skillnaden mellan det beordrade och det verkliga antennläget i tipp- och girled är mindre än 0,5°.
- Målskyddsdämparen är urkopplad.
- Referensdämparen är urkopplad.
- Referensgyrots kardanlägen är korrekta.
- Kardanlåsningen i referensgyrot är upphävd.
- Zonröret får godtagbar strömförsörjning.
- Robotens strömförsörjning är korrekt.
- Tryckvätsketrycket till roboten är godtagbart.
- Trycket hos returtryckvästskan från roboten är godtagbart.
Samma procedur gäller för klargöring av lavett på de nedre staplarna, en för varje lavett. När hela stapeln är grön är lavetten klargjord. För att lavetten ska vara klargjord ska nedanstående punkter uppnås:
- Lavetten är uppstartad.
- Lavettriktgivaren i rbgc följer korrekt.
- Skillnaden mellan den beordrade och den verkliga lavettriktningen är mindre än 0,25°.
I detta läge finns nu tre alternativa scenarier:
- Att omkopplaren hos sövak ställs på OFF / alternativt att knappen MISSILES OFF trycks in och robot återställs och lavettens motor stängs av.
- Att normal avfyringssekvens startar.
- Att kort avfyringssekvens startar (mer om avfyringsskevens nedan).
Rbstrileds uppgifter vid och efter avfyring är att avfyra robot, övervaka och vara insatsberedd på störningar. Översiktsindikatorn på manöverbordet kan fungera som PPI (i mod K1-K4) eller C-indikator. (I mod K5-K6, mer info om dessa mod finns i avsnittet ”Stridsledning”). Det är viktigt att betona att en rbstriled är underställd robotledaren i lfc, han har under hela uppdraget kontakt med robotledaren och får inte ta några egna beslut.
Rbstriled övervakade att brr låg kvar på målet. Han uppdaterade även robotens målsökare löpande genom att trycka på en knapp med jämna mellanrum. Han höll också uppsikt över att målföljningen följde normalt förfarande, detta indikerades med en grön lampa (ON TARGET). Om målsökaren låste på en störsignal indikerades detta med en röd lampa, (PASSIVE TRACKING) en ”ilsken röd lampa” enl. Åke Janneryd som var rbstriled på F 13. Många olika typer av störning kunde förekomma och de störfall man misstänkte skulle kunna uppträda i skarpt läge tränades i simulatorn. Nedanstående är bara ett exempel på en störsituation. I de fall som det tänkta målets signal dränktes av en närliggande störsignal låste målsökaren på störsignalen och den röda lampan tändes, roboten gick då mot störflygplanet. Om målsignalen sedan blev starkare än störsignalen så låste målsökaren istället på målet och den gröna lampan tändes, roboten styrdes nu mot målet. Detta kallas för ”genombränning”, om genombränning inte skedde så träffade man störflygplanet istället för målet.
I de fall som målet var störflygplanet så låste man målsökaren på störsignalen och i och med detta så ”hjälpte” målet till att åstadkomma sin egen undergång.
Efter en träff i målet så hörs inte längre dopplersignalen i högtalarna, istället hörs ett brus som uppstår då skrotet från sönderfallande målet och den sprängda roboten ger upphov till mängder svaga dopplersignaler. Detta brus togs som indikering på att roboten träffat.
Indikeringar på PPI
På indikatorn kan tre olika skalor väljas, 120. 240 och 480 km. och här visas ett antal olika informationer i en bestämd ordning.
A) Målläge (lfc-data). Anges som en punkt.
B) Målbana (lfc-data). Anges som en prickad vektor. Den visar den av datamaskinen beräknade banan från nu till träffpunkten. Om målbanan inte slutar inom robotens bränsleräckvidd slutar banan i den punkt där målet skulle befinna sig när robotens bränsle är slut.
C) Målläge (brr-data) Anges som en liten cirkel.
D) Målbana (brr-data) Anges som en heldragen vektor med samma information som i B.
E) Grupperingsplatsen. Anges som en liten cirkel i centrum.
F) Flygprogramgräns. En cirkel centrerad kring grupperingsplatsen anger den gräns vid vilken övergång kan ske till nästa flygprogram. Eftersom räckvidden vid ett och samma flygprogram är beroende av flyghöjden ändras även cirkelns radie beroende på målets flyghöjd (mer om flygprogrammen finns i separat avsnitt).
G) Målläge vid avfyring. Anges som en cirkel på den heldragna vektorn, D. Läget beräknas av datamaskinen.
Om brr följer det mål som anvisats av lfc ska A helt överensstämma med C och B med D. Viss differens finns alltid då data från lfc-datan inte är lika noggrann som brr-datan.

PPI samt FIRE-knapp till uppe till höger.
Foto: Håkan Wall.
PPI-information.
Bild via Arboga Robotmuseum.

Även denna bild visar en uppstartad panel, informationen som visas är grupperingsplatsen i mitten, den stora ringen som visar flygprogramgränsen samt målläge och målbana utifrån brr-data.
Foto via Dag Malmströms samlingar.
Indikeringar på C-indikator
I K5 och K6 visas de mål som brr hittar vid manuell sökning, 22 olika mål kan lagras av datamaskinen. Utöver målmarkering visas även sidvinkelaxel, höjdvinkelaxel, antennlägesmarkering och styrspakläge.
Rbstriled har på sitt manöverbord tre stycken A-indikatorer, dessa presenterar information som utgör underlag för bedömning före avfyring, när roboten är i luften och vid bedömning av träffbild.
Måldopplerindikatorn har tre tidsaxlar. På den översta indikeras det dopplerspektrum (0-45 KHz) som tas emot i brr:s mottagarantenn. De två övriga anger läget av brr:s hastighetsgrind (målets uppmätta hastighet) som en positiv indikering och läget av lfc:s hastighetsgrind som en negativ indikering. Om dopplersignalen blir svag, dvs om målet svänger så att det går parallellt med radarn så blir den uppmätta hastigheten från brr 0, men lfc:s målföljning visar alltid rätt hastighet på målet.
Åke Janneryd (F 13) berättar att man utförde prov på om man på dopplersignalen kunde se om det var ett propellerplan eller ett jetplan. Det visade sig att signalerna inte såg likadana ut så det var fullt möjligt. Det var dock ingen som såg någon nytta i denna information så proven resulterade inte i något.
Stördopplerindikatorn har också tre tidsaxlar. Den översta visar signalen som tas emot i brr:s störmottagarantenn och visar hur störmiljön ser ut för robotens målsökare avseende målets dopplerspektrum. De två nedre axlarna visar samma information som i måldopplerindikatorn.
Genom att jämföra indikatorernas övre axlar kan robotstridledaren upptäcka om målet försöker manipulera målets dopplersignal.
Störminnesindikatorn kan fungera på två olika sätt, omkoppling mellan dessa görs automatiskt vid en tidpunkt som beräknas av datamaskinen. Den övre tidsaxeln anger störsituationen i huvudloben på de signalnivåer som tagits emot under de senaste 30 sekunderna i mottagarantennen och den undre visar störsituationen i störbestämningsloben under samma tid i störmottagarantennen. Datamaskinen lagrar ett medelvärde av signalnivån i de två kanalerna för varje sekund och matar sedan ut de lagrade värdena till indikatorn. Tio sekunder innan beräknad träff kopplar datamaskinen om så att istället visas det negativa dopplerspektrumet vilket används vid verkansbestämning.
Störcentrumindikatorn visar tyngdpunkt av brusstörning i förhållande till sändarloben, alltså från vilken riktning störningen kommer i förhållande till antennens huvudriktning.
Vid tillfällen med en stark störsignalsom försöker få roboten att avvika från sin kurs så vill gärna målsökaren låsa på den starkaste signalen. När rbstriled upptäcker störning så kan han låsa upp målsökaren och rikta om radarn mot målet. Om han samtidigt väljer ett smalt sökmönster så att störsignalen hamnar utanför sökområdet kan målsökaren låsa på målsignalen.
Manöverbordets indikatorer.
Bild från Flygvapnets utbildningsmaterial.
Bilden visar indikatorer med aktiv information.
Foto via Dag Malmströms samlingar.
Rackarna i rbgc:
S-racken: här finns en mindre telefonväxel samt en telefon.
D-racken: i denna rack finns lavettriktgivare, ANDI-omvandlarenhet, antennriktgivare och doppleromvandlare.
L-racken: kopplingsskåp för inkommande och utgående radiolänksändningar.
R-racken: här finns radarkopplingsenheten där kablar från brr kopplas till olika enheter i rbgc.
Z-racken: här finns omkopplare, indikeringslampor och mätinstrument för kontroll av strömförsörjningen och härifrån fjärrmanövreras strömställare för strömförsörjningen i rbgc. Dessutom regleras luftkonditioneringen härifrån, temperatur och luftfuktighet. Även huvudsäkringarna finns här.
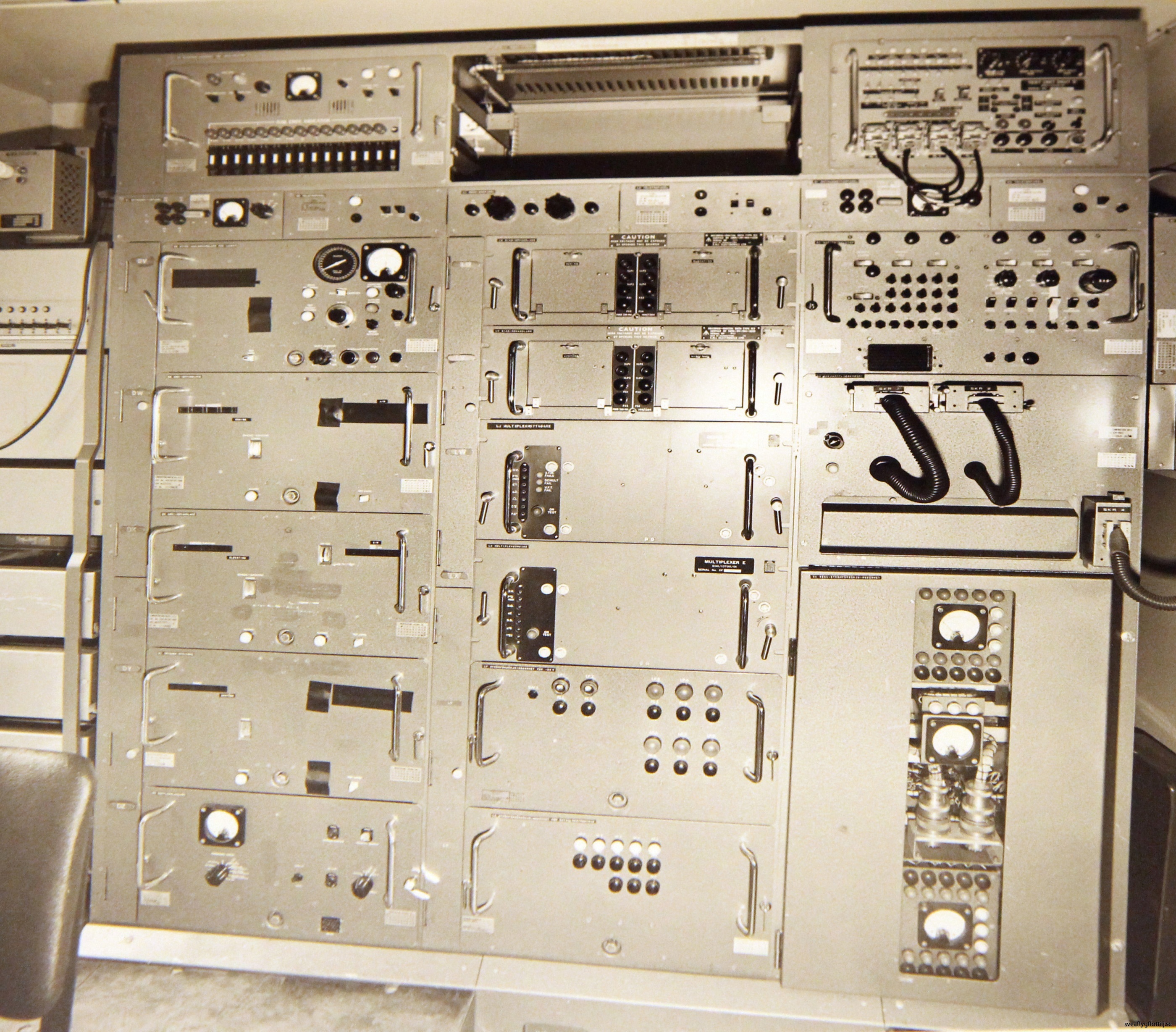
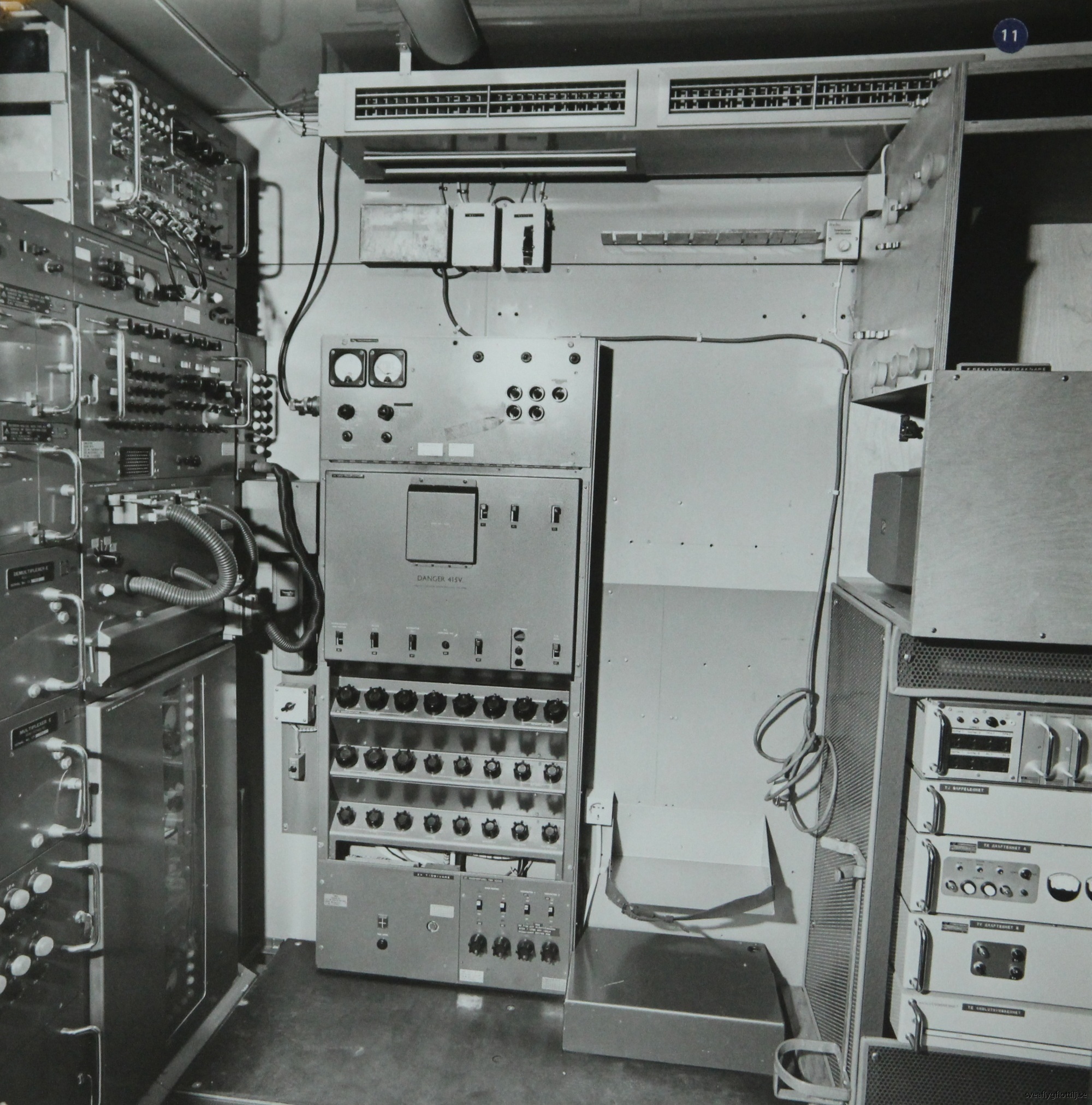
Rackarna på främre kortsida. Från höger till vänster; R-racken, L-racken, D-racken och S-racken (syns endast delvis). Bilden är från en svensk rbgc, troligen är den tagen i samband med ombyggnaden till Op-vagn 44. Bild via Arboga Robotmuseum.
Klargöringsrackarna PA-PD
Varje klargöringsrack innehåller följande:
- Skyddsbrytarpanel och telefonpanel.
- Oscilloskop och mottagarsimulator avsedda för provning.
- Mottagarsimulator.
- Avstämningsenhet innehållande kretsar för klystron- och doppleroscillatoravstämning i målsökaren.
- Blockeringsenhet som förhindrar avfyring om inte alla villkor för avfyring uppfylls.
T-racken
- Prov av rbgc, i T-racken finns olika provningsenheter som gör det möjligt att prova de kretsar i rbgc som normalt är förbundna med robotmottagaren och brr.
- Prov av robot, robotmottagare och styrsystem kan provas när roboten ligger på lavetten. Med hjälp av simulerade signaler och mätinstrument kan alla viktiga funktioner provas.

Från vänster står de fyra klargöringsrackarna, PA – PD. Sedan T-racken och på kortväggen längst in ser vi ett par avfyringsrackar. Bilden är tagen på Bloodhound museum i Schweiz.
Foto: Håkan Wall.
F-racken
Här finns anslutningsdon och säkringar. Med en omkopplare väljer man vilken lavett som ska kontrolleras med lavettriktgivaren i D-racken. Det finns även en omkopplare för att välja vilken målsökare som ska kopplas upp mot styrprovenheten i T-racken. Säkringar för avfyringsracken är placerade här.
Prov av zonrörets funktion utfördes med en extern provutrustning som inte ingår i ordinarie utrustning utan var monterad i en VW-buss, anslutning av utrustningen gjordes i F-racken.

T-rackens övre del. På kortsidan sitter F-racken. Bilden är tagen på Bloodhound museum i Schweiz.
Foto: Håkan Wall.
Dessa är till för att avfyra en robot men även för att omöjliggöra en avfyring av misstag. De står alltid i OFF-läge. Inför avfyring sätter man i kastellnycklarna, endast då går det att vrida till ON-läge.Varje enhet består av avfyringskopplingspanel, avfyringsreläenheter, blockeringskopplare, huvudkopplingspanel, robotkopplingspanel, lavettövervakningsenheter, klargöringskopplare.
Lavettövervakningsenheten används för kontroll och manövrering vid lavettens sidrikning. Den innehåller en underenhet i form av en lavettservoförstärkare som matas med signaler från lavettens jämförarenhet och lämnar en styrsignal till servoventilen för hydraulmotorn på lavetten. Klargöringskopplaren har till uppgift att koppla in de olika stegen i klargöringssekvensen i rätt följd.
Innan en robot kan avfyras måste alla avfyringsblockeringar upphävas. Dessa blockeringar härstammar från datamaskinen och klargöringsrackarna och består av följande:
- Brr kan följa målet.
- Klargöring av robot klar (mer om detta under manöverbord nedan).
- Lavett klargjord och sidriktad (mer om detta under manöverbord nedan).
- Tändkretsarna klara (mer om detta under tändkretsarna nedan).
- Datamaskinen bekräftar att dess beräkningar visar att avfyring kan generera en träff i målet (mer om detta under datamaskin, avfyringsblockeringar).
Tändkretsarna
För att en robot ska kunna avfyras ska nedanstående punkter uppnås:
- Kastellnyckelströmställaren är tillslagen, en kastellnyckel är ett metallock med ett vridhandtag. Detta lock passar endast i en strömställare. De fyra nycklarna förvaras i ett låst skåp med plexiglasruta ovanpå rack PA (detta skåp infördes under våren 1972).
- Omkopplaren OFF/CHECK/SELECT står på SELECT.
- Reläet i avfyringsskyddsenheten på lavetten är tillslaget.
Avfyringssekvensen
Det finns två avfyringssekvenser, den normala och den korta.
Den normala ser ut enl. följande efter att FIRE-knappen tryckts in, observera att tidräkningen utgår från ögonblicket roboten lämnar lavetten.
- Minus 5 sekunder, termobatterierna tänds med en eltändare.
- Minus 3 sekunder, robotens strömförsörjning från lavetten kopplas ifrån och batteriförsörjningen kontrolleras. Batterierna ska redan efter 2 sekunder strömförsörja roboten. Om batterierna inte fungerar stoppas avfyrningssekvensen. Ett övertryck från en gasgenerator skapar ett övertryck som trycker bort väderskydden på rammotorerna,
- Minus 2 sekunder, rammotortändarna tänds.
- 0 sekunder, startrakettändarna tänds och roboten lämnar lavetten.
Den korta avfyringssekvensen startas av datamaskinen om avståndet till den beräknade träffpunkten är mindre än 28 kilometer (lutande 28 km, dvs. avståndet från robot till målet i höjdled).
- Minus 2 sekunder, termobatterier och rammotortändare tänds, ingen kontroll av batteriströmförsörjningen.
- 0 sekunder, startrakettändarna tänds och roboten lämnar lavetten.
Lars Gröön, rbstriled och senare rbgc-tekniker på Telub berättar:
Under många av rackarna fanns i sockeln engelska vägguttag för anslutning av elektriska prylar som mätinstrument, lödkolvar m.m. 220-240V. De var svarta och kontakten av typ G som innehöll en säkring vilket vi fick lära oss den hårda vägen. Vi gjorde förlängningstumpar med omvandling från Engelsk till Svensk modell.

Övre delen av avfyringsrackarna, MA-MD. Från ovan: avfyringskopplingspanel (den smala panelen), avfyringsreläenhet (den röda strömbrytaren har tre lägen, test, fire och off), blockeringskopplare (den manuella avfyringsspärren där en kastellnyckel behövdes).På denna sena schweiziska utrustning är kastellnyckeln ersatt av ett låsbart handtag. Bilden är tagen på Bloodhound museum i Schweiz.
Foto: Håkan Wall.
Kastellnyckelns placering.
Foto via Pete Harris, BMPG.

Kastellnyckel nr 541.
Foto: Lars Gröön.

Kastellnyckel nr 541, motsvarande figur fanns i brytaren i blockeringskopplaren.
Foto: Lars Gröön.

Nedre delen av avfyringsrackarna. Från ovan: huvudkopplingspanel, robotkopplingspanel, lavettövervakningsenheter, klargöringskopplare. Bilden är tagen på Bloodhound museum i Schweiz.
Foto: Håkan Wall.
O-racken
Enhetens uppgift är att ta mot de uppgifter i digital, analog eller elgonform som kräver behandling eller lagring i datamaskinen Uppgifterna ska omvandlas till digital form, ges rätta ingångsdresser och vid rätt tidpunkt matas in i datamaskinens program. Varje överföring mellan O-racken och datamaskinen kräver värdefullt programutrymme med undantag för överföring av Lfc-data. Signaler från datamaskinen till övrig utrustning omvandlas också i O-racken.
O-racken innehåller nio boxar med tryckta kretsar, en instrumentpanel och en reläpanel. Dessutom finns en konstantpanel där manuell inställning av konstanter som behövs för datamaskinen i vissa beräkningar, dessa är vindriktning, vindhastighet, temperatur för höjderna 1 km och composite height altitude. Det sistnämnda värdet beräknas med värden från 9, 12 och 15 km:s höjd. Värden från 9 och 15 km tas med en gång, värdet från 12 km två gånger. Det adderade värdet divideras med 4 och slutresultatet blir värdet för composite height altitude, dessa värden erhåller rbstriled från robotledaren på Lfc. Det är även viktigt att ange grupperingsplatsens höjd över havet. På grund av det sistnämnda har alla stridsplaner angiven höjd för belysningsradarens placering. Det var rbstrileds uppgift att se till att alla konstanter blev rätt inlagda, sedan kan det ha varit så att han delegerade detta till sövak.
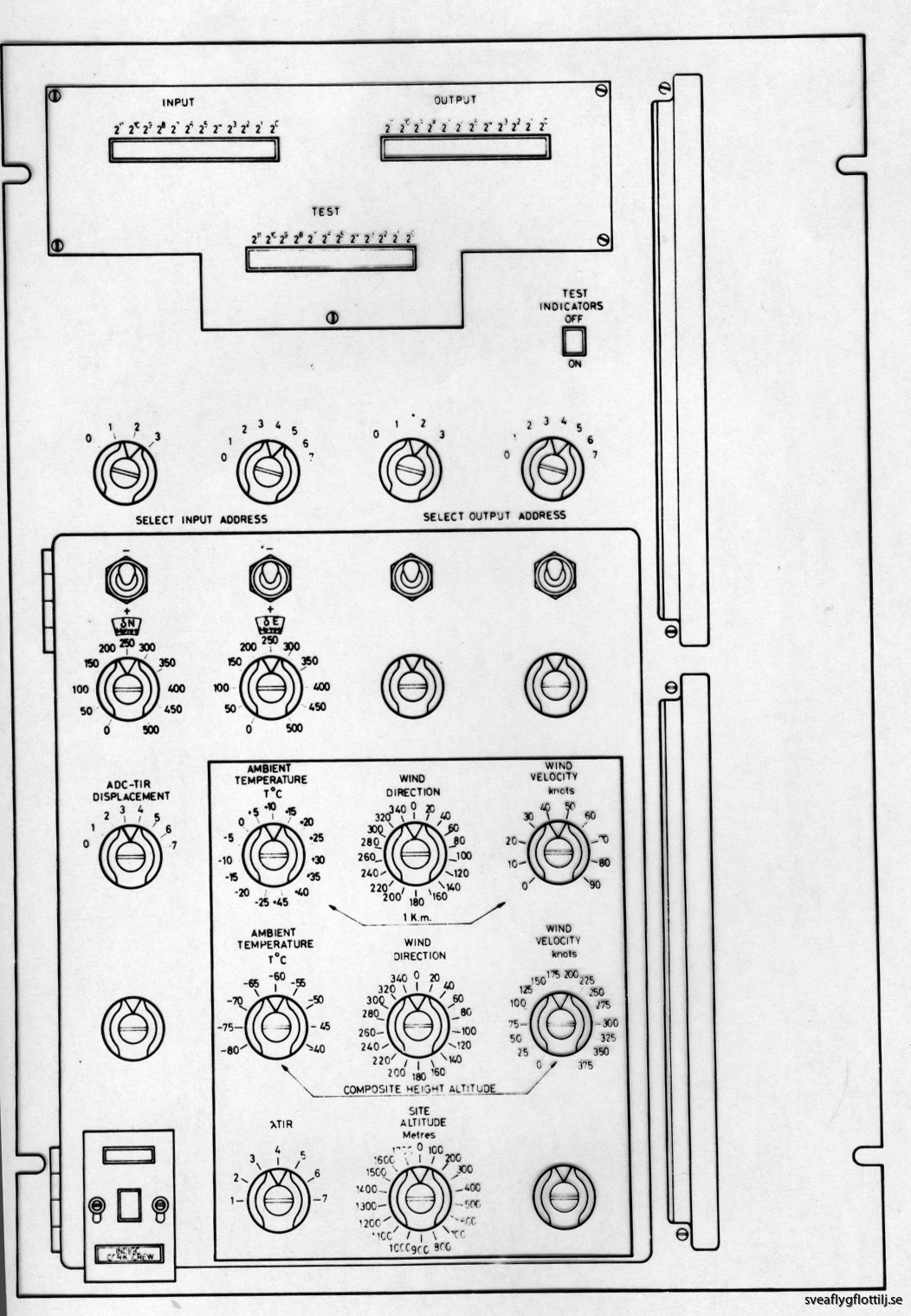
O-rackens konstantpanel, användes för inmatning av olika parametrar för datamaskinens beräkningar.
Bild från Flygvapnets utbildningsmaterial.
Datamaskinens mekaniska uppbyggnad
Digitala datorer med processor utvecklades i slutet av 50-talet. Ferrantis Argus-datamaskin var en av världens första. Systemets datamaskin är en Argus 200. Dess storlek går inte att jämföra med dagens datorer, den väger nämligen 454 kilo och är 1,83 meter lång och 0,61 meter bred, höjden är 1,52 meter.
Journalisten Thore Rösnes besökte pressvisningen av robot 68 på F 8 den 12 maj 1965. I hans artikel kan man läsa följande om rbgc ”i centralen ingår en liten och snabb datamaskin”. Begreppet ”liten och snabb” om datorer hade på den tiden uppenbarligen en annan innebörd än idag.
Datamaskinen består av tre rackar, från vänster till höger, A1, A2 och A3.
- A1 innehåller åtta metallådor för kretskort och ett kärnminne som var datorns arbetsminne.
- A2 sju metallådor för kretskort.
- A3 innehåller en manöver- och indikatorpanel samt tre metallådorför programbrick-förråd innehållande utbytbara programbrickor samt brickor för tillhörande förstärkare samt brickor för tillhörande läs- och skrivförstärkare, totalt 64 programbrickor. I skåpet med porgrambrickor och läs/skriv-förstärkare fanns spår i sidorna där man sköt in programbrickorna och läs/skriv-förstärkare.
Boxarna för kretskorten är 48 cm breda, 14 cm höga och har ett djup på 60 cm, i dessa finns plats för 36 kretskort, själva kretskorten är 19,7 x 17,5 cm inklusive en 24-polig tryckt kantkontakt för elanslutningen.
Kärnminnet är 20,3 x 13,3 x 12,7 cm och är monterad på bottenramen av A1. Programbrickorna är 42,5 x 53 x 1,8 cm.
Hösta tillåtna temperatur i luften kring kretskorten är 45ºC. Vid högre temperaturer försämras datamaskinens tillförlitlighet.
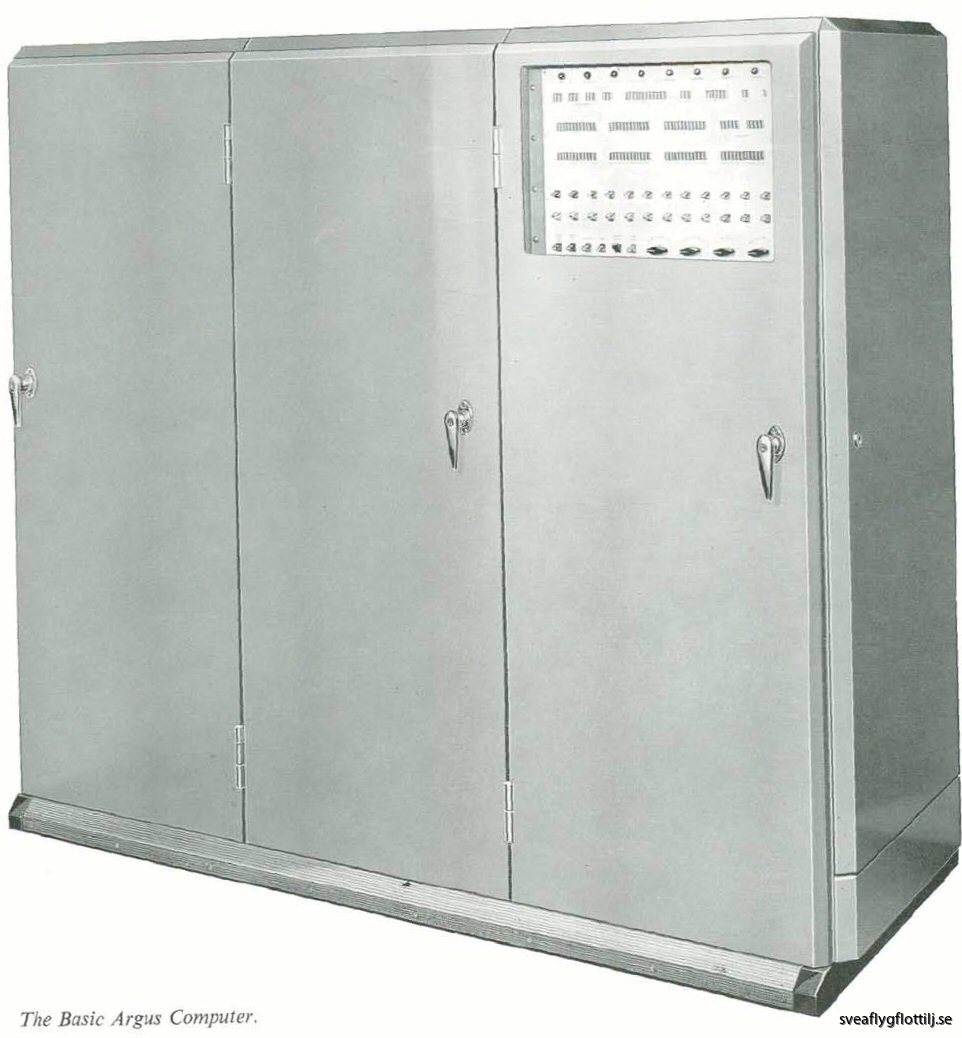
Argus 200. Våra rackar hade snäpplås istället för handtag. Bild från tillverkaren.
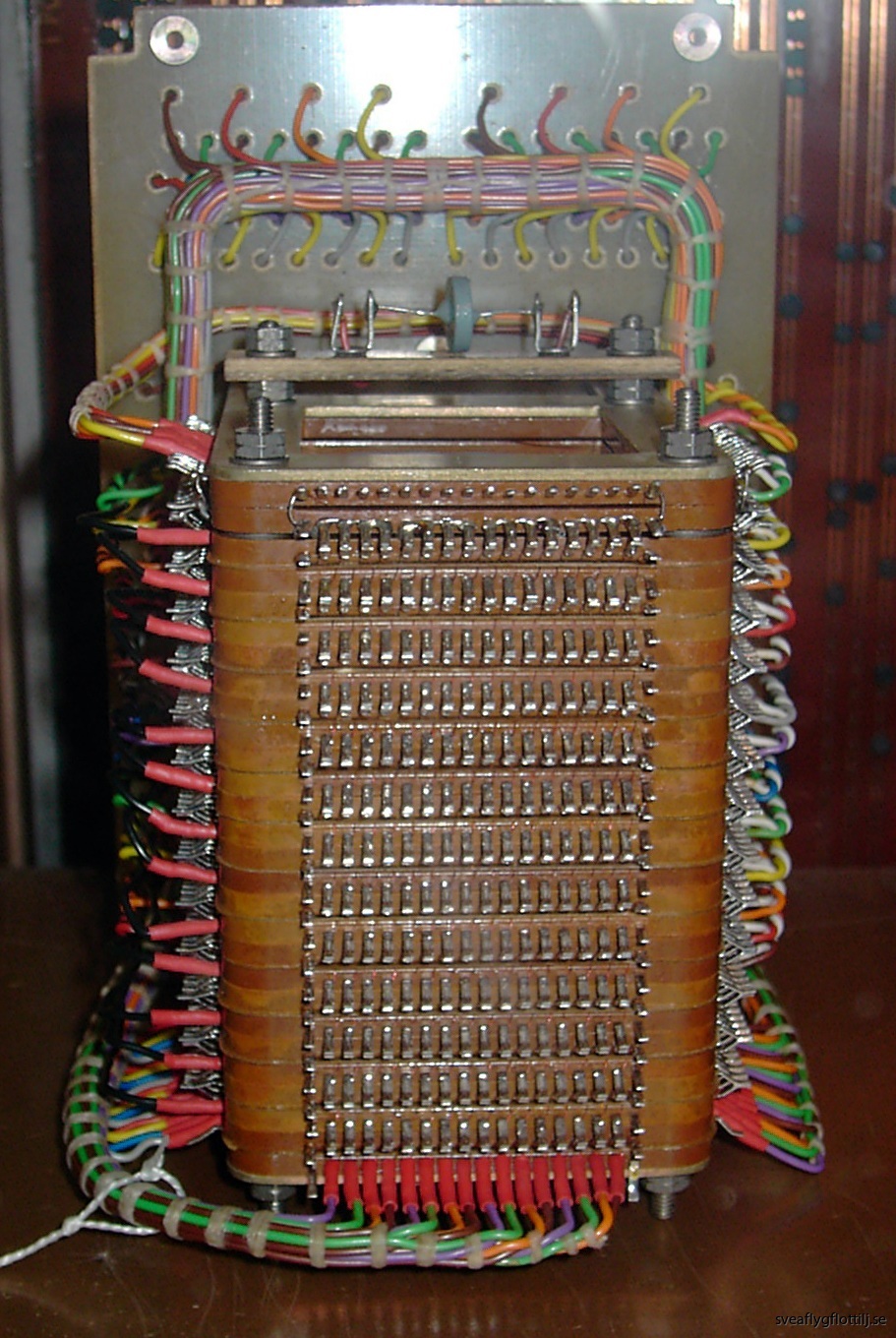
Detta är den enda bild vi fått fram på ett kärnminne från en Argus 200.
Foto via BMPG, England.
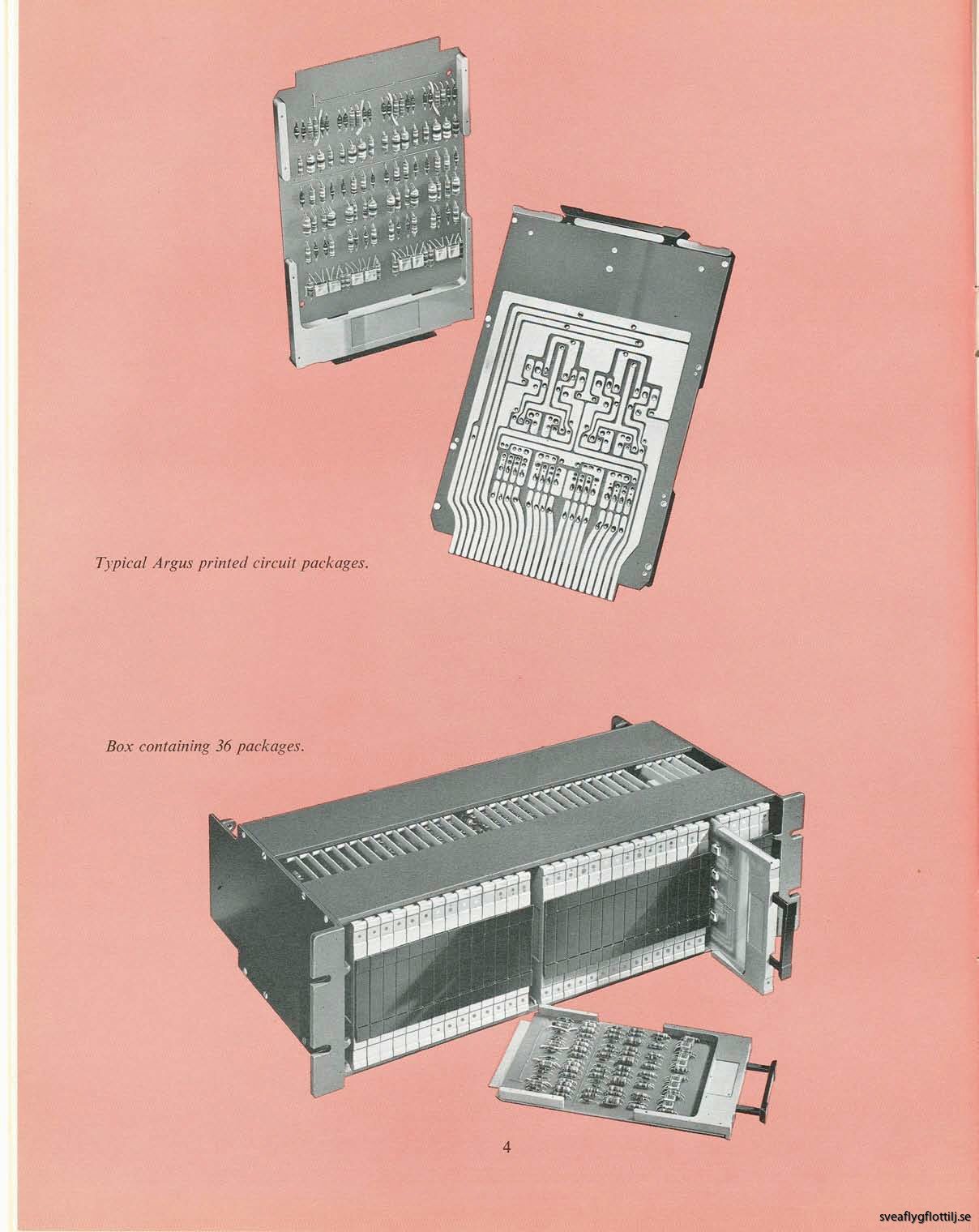
Bild över hårdvaran i datorn. Bild från Ferranti.
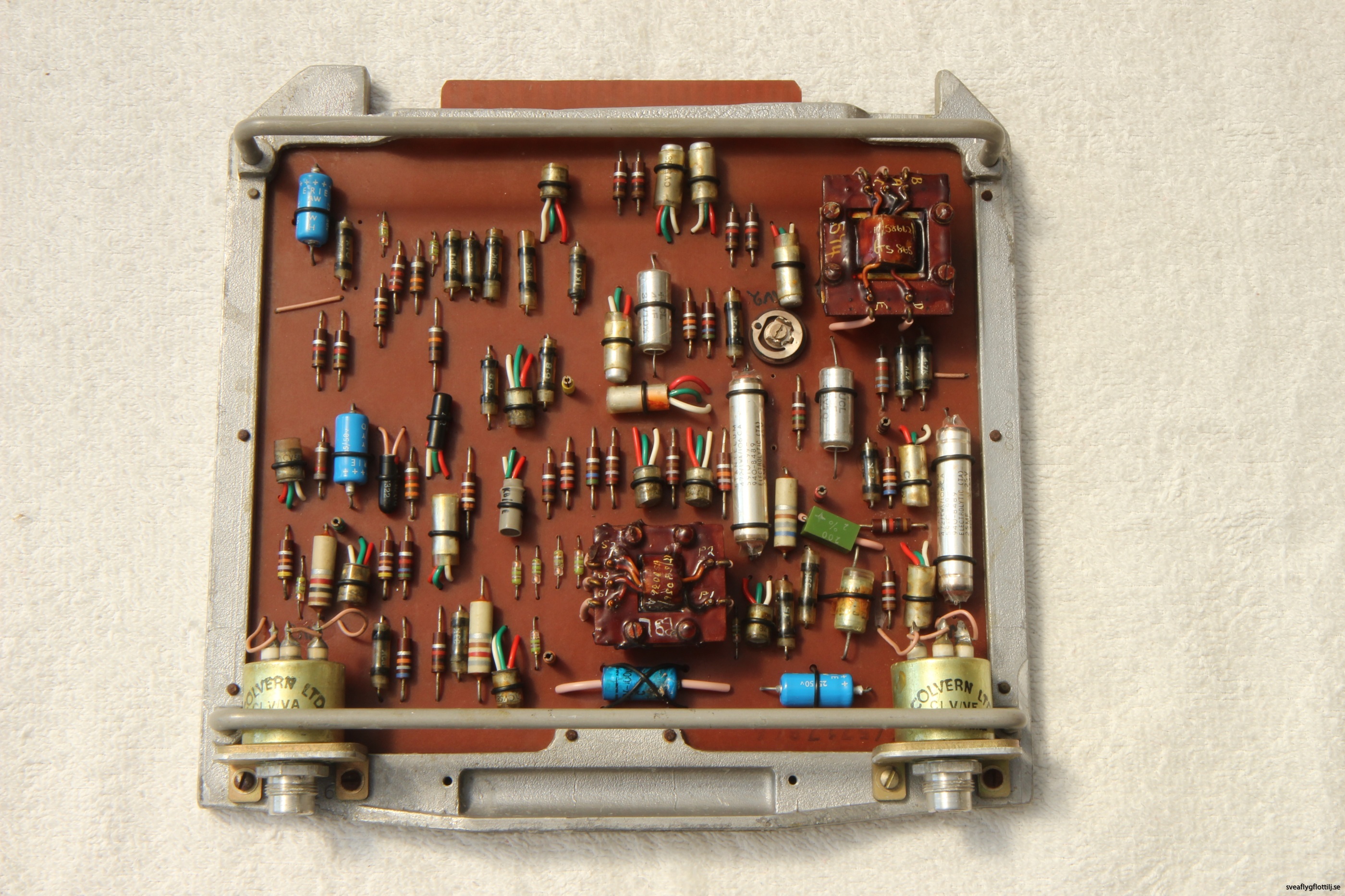
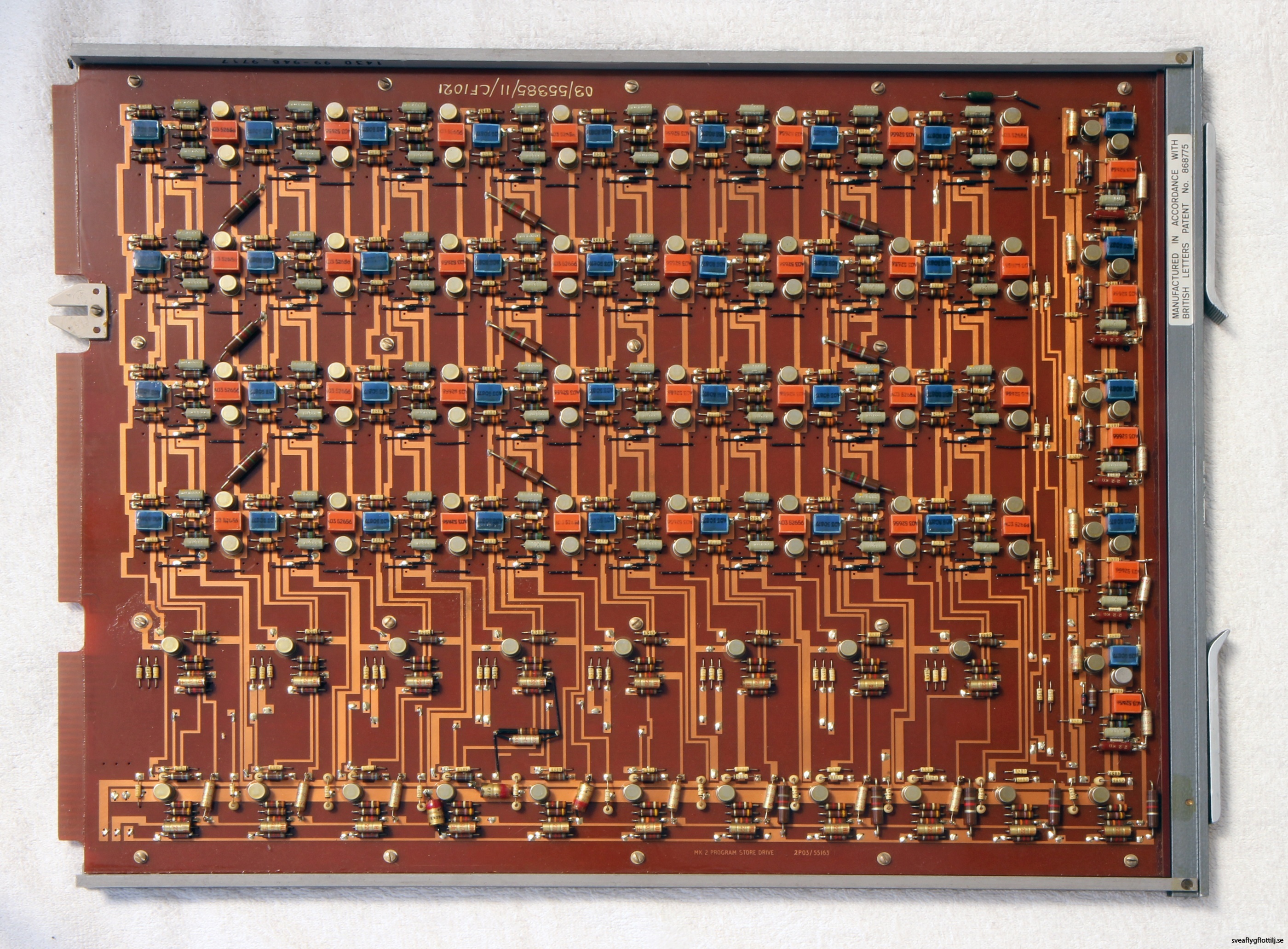
Kretskort till datorn.
Foto: Håkan Wall.

Kretskort till datorn.
Foto: Håkan Wall.
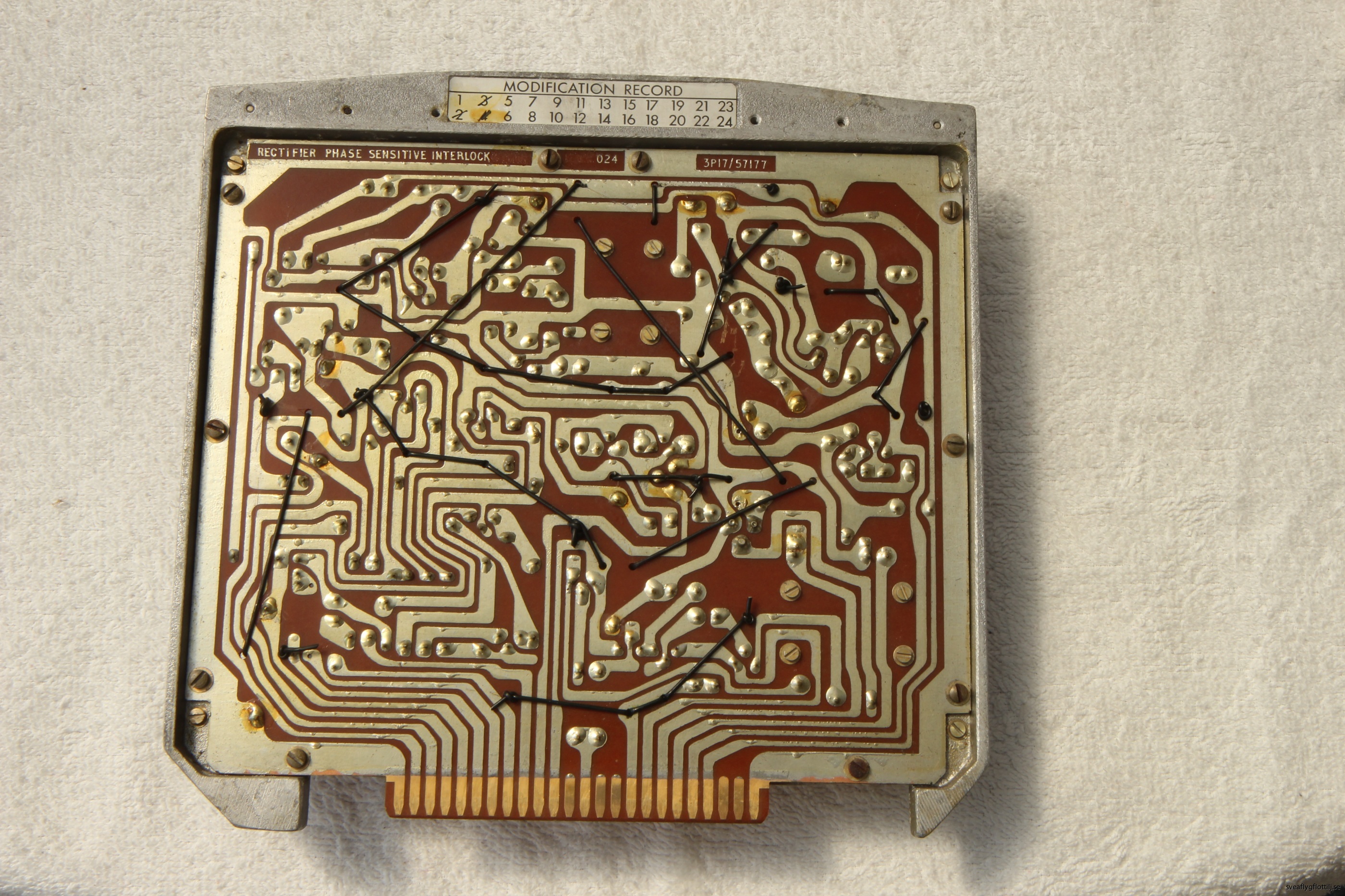
Kortets baksida, nertill ser man den 24-poliga kantkontakten.
Foto: Håkan Wall.
Upptill markeras genomförde modifieringar.
Foto: Håkan Wall.
Detta är ett kort för läsförstärkare till minneskorten. Kortet är 51 x 40 cm. Foto Håkan Wall

Detta är ett kort för läsförstärkare till minneskorten. Kortet är 51 x 40 cm. Foto: Håkan Wall.
Detta är ett kort för läsförstärkare till minneskorten. Kortet är 51 x 40 cm.
Foto: Håkan Wall.
Detta är ett kort för läsförstärkare till minneskorten. Kortet är 51 x 40 cm.
Foto: Håkan Wall.
Manöver- och kontrollpanelen är placerad på övre delen av A2. Längst upp till höger finns en högtalare med en volymkontroll. Högtalaren ger ifrån sig ljud när programmet arbetar. Exempelvis kan man få ett ljud om det kommer ett hopp i programmet, eller om datamaskinen stannar kommer en ton höras. Denna funktion kan användas för felsökning. På motsvarande vänstra sida sitter en volymeter för att kontrollera datamaskinens driftspänningar. Direkt under högtalaren och volymetern finns tio stycken indikeringslampor som indikerar olika felorsaker.
Under dessa kommer 130 stycken indikatorer fördelade på tre rader. Dessa är till för övervakning av programmets förlopp samt för teständamål. Man kunde t.ex. läsa varje programinstruktion, alltså en rad peggar på en av programminnesbrickorna. Peggarna blev slitna vid drift och orsakade ibland programfel. De såg då ut som ett timglas och den överinducerade spänningen till lästrådarna blev för liten. Man fick då byta just den peggen.
Under dessa finns 2 grupper med tolv stycken omkopplare. Dessa kan användas tillsammans med de fyra vreden till höger nedanför omkopplarna för att göra justeringar i programmet.
Omkopplarna till vänster om vreden används för tester och för ljud inställningar till högtalaren.
Lars Gröön igen:
- Minns kontrollampor, minst en var grön och visade att datorn var ok.
- Har för mig att man med hjälp av de tolv omkopplarna (vippbrytare) startade datorn vid ”teknisk drift av rgbc” underhåll etc. Har siffran 600 i huvudet som skulle varit den programinstruktion man startade på, men minnet är diffust här. Det fanns andra programinstruktioner som t.ex. för test/justering PPI m.fl.
- De 30 stycken indikatorerna visade bitmönstret i en instruktion. Var små rör. Vid normal drift var det bara ett flämtande sken när de växlade mellan binär etta eller nolla.
- Om datorn fungerade som den skulle var det ett visst ljud i högtalaren samt en speciell rytm i de 30 lamporna samt den gröna tänd. Högtalarbruset ställde man volymen så man hörde den i hela vagnen. Över huvud taget var det ljudupplevelser i vagnen som indikerade om allt stod rätt till eller inte.
Så långt Lars Gröön.
- Datamaskinens arbetshastighet är 500kHz.
- Arbetstemperaturen är ca 30° C.
- Siffersystem: Binärt, med fixerad punkt.
- Arbetsmod: Serie/parallell.
- Ordlängd: Teckensiffra + elva binära siffror. Möjlighet till 24-bits arbete.
- Ordtid: 20 µ sekund.
- Instruktionstyp: 24- bitar modifierad enkel adress med multippel ackumulator.
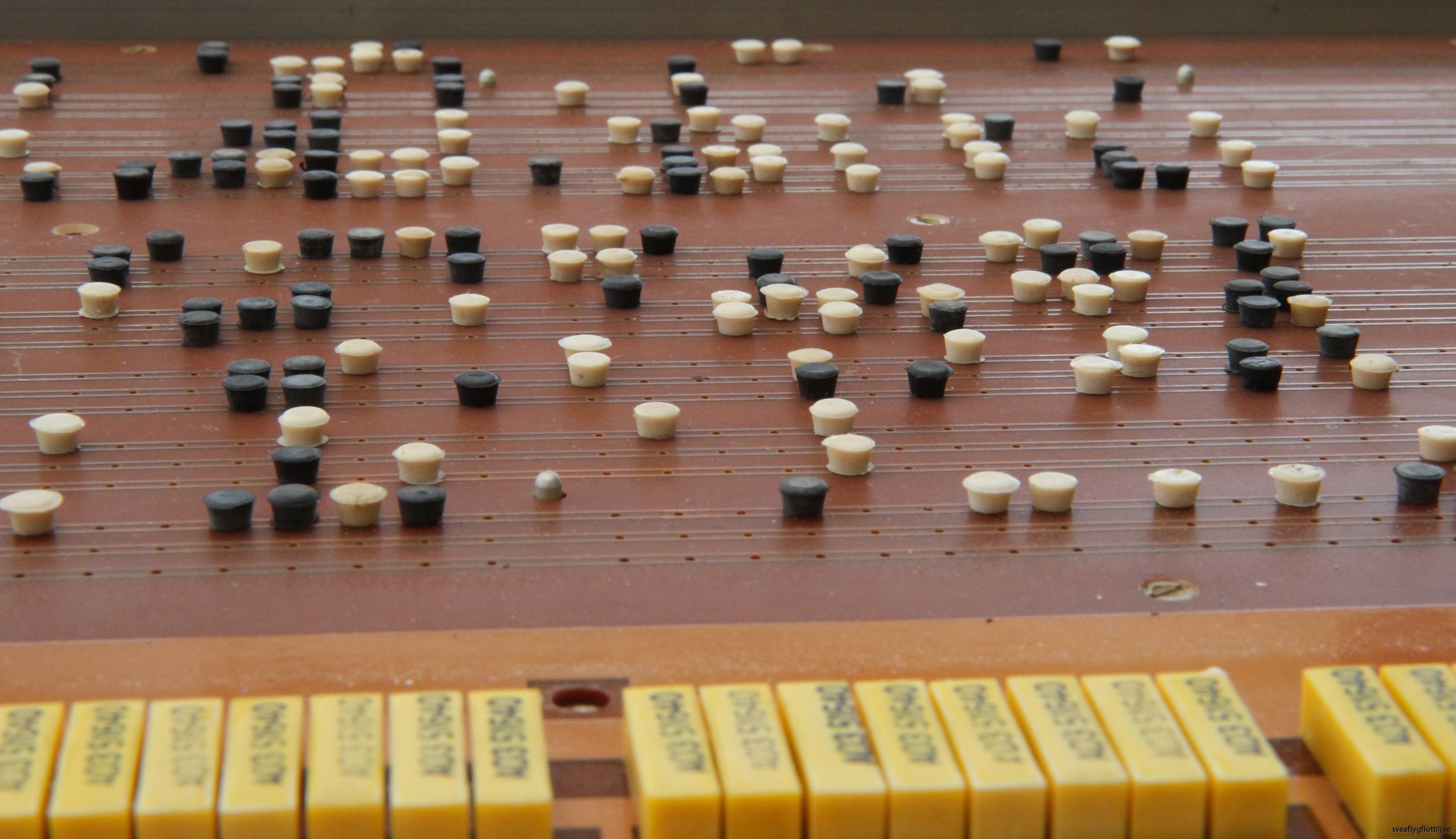
- Programminne: Bestod av stora programbrickor för uppstiftning av instruktioner och permanent förrådsatta konstanter (omedelbart tillträde). Kapacitet 3.072 programinstruktioner, 64 stycken på varje bricka. Ett instruktionsord består av en 24 bitar, ”nollor och ettor” .För varje bit fanns ett borrat hål i programbrickan med två lässlingor runt hålet, en längsgående för varje instruktion och en tvärsgående för varje bitposition. Lässlingorna var anslutna till läsförstärkare som kunde läsa av om det fanns en peg i bitpositionen (1) eller om hålet var tomt (0). En instruktion lästes av i taget och utfördes. Om instruktionen inte var en hoppinstruktion lästes nästa instruktion av på brickan och när sista instruktionen på brickan avlästs fortsattes på nästa programbricka. Programmeringen gjordes med s.k. peggar som bestod av en ferritstav om ca 1x6 mm (diameter x längd) som satt på en liten gummitopp för att kunna hanteras med fingrarna, Man konfigurerade en programinstruktion i taget genom att sätta i peggar i de hål som man hade räknat fram för respektive instruktion.
- Kärnminne: Ferrit kärnmatrix (omedelbart tillträde). Kapacitet 1.024 ord direkt och omedelbart tillträde till minnet kan erhållas även från yttre utrustning om datamaskinenens program inte använder minnet, om så är fallet blir fördröjningen 20 µ sekunder, minnets storlek 1 kb.
- Typ av logik: 2-läges NOR-logik.
- Elkraft: 208 V +/- 8 V, 3-fas.
- Effektbehov 2 kVA.
I instruktionen framhålls att det går snabbt att byta från en programmering till en annan, genom att man byter ut befintlig programbricka och ersätter den med en annan förprogrammerad bricka. En annan fördel med Argus 200 är att den har förmågan att acceptera information från yttre källor vid den tidpunkt informationen blir disponibel, de få vanliga datamaskiner som finns på marknaden vid denna tidpunkt kan endast ta in ny information när den når vissa punkter i programmet.
Styrregistret kan betraktas som maskinens hjärta. Här bestäms tidsföljden för valet av order från programbrickorna, detta seriemässiga val kan ändras genom speciella order på programbrickan. När en order eller instruktion valts avkodas den och väljer data som behövs från kärnminnet och överför informationen till räkneenheten. Conny Karlsson, Telub, som var utbildad på datorn berättar följande om beräkningarna: Argus 200 var ju konstruerad för att beräkna komplicerade algoritmer och var därför utrustad med kraftfulla instruktioner för detta. Den kunde naturligtvis de fyra räknesätten och detta med en enda instruktion. Addition och subtraktion var ju enkla och snabba att utföra (< 40 microsek). Multiplikation och division tog dock ganska lång tid att utföra (180-640 microsek). Vid enkel ordlängd (ordlängd för data= 12 bits) gav dessa instruktioner svaret i dubbel ordlängd (24 bits). Detta kunde även användas gav då fyrdubbel ordlängd (48 bits), så det var alltså hög precision vid beräkningarna. Det fanns även en normaliseringsinstruktion som minskade ordlängden och avrundade till enkel ordlängd.
Programmeringsbricka.
Bild från Ferrantis broschyr.
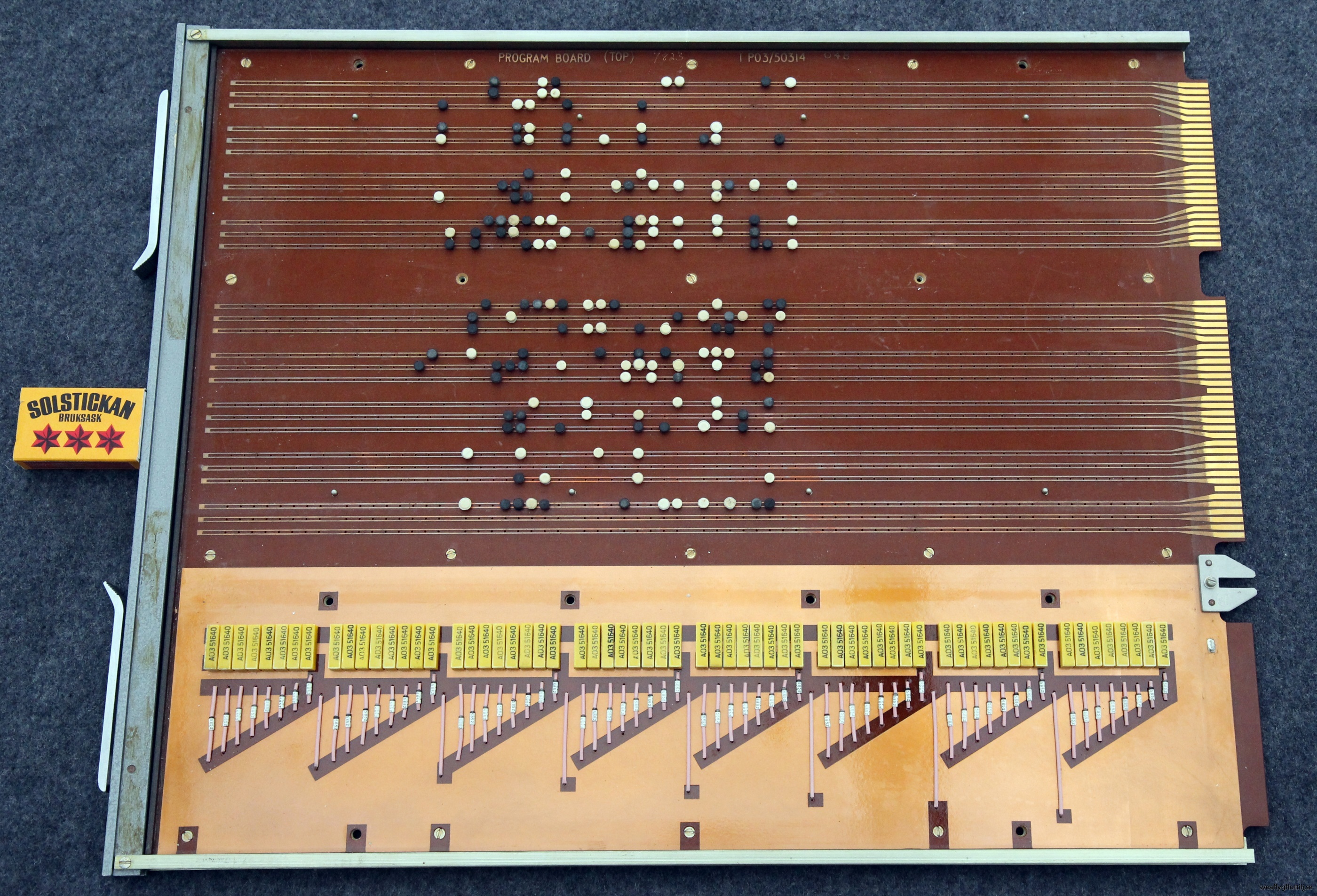
Programmeringsbricka från svensk rbgc. Som synes på föregående bild var det betydligt fler pegar på varje bricka, på denna är endast en mycket kort instruktion programmerad. På varje bricka fanns utrymme för 64 instruktioner, Varje instruktionen behövde en transformator, dessa är gula och syns nedanför programmeringsfältet.
Foto: Håkan Wall.

Peggar som användes till programmering.Gemet användes för att peta ut ferritstiftet om det inte följde med när man lyfte i gummitoppen. Ett mycket använt verktyg!
Foto: Conny Karlsson.

Peggar på brickan.
Foto: Håkan Wall.

Transformatorer.
Foto: Håkan Wall.
Från varje transformator sker programmeringen på raden rakt över brickan.
Foto: Håkan Wall.
Denna dator var konstruerad för att stå fast placerad inomhus, inte för att transporteras i en vagn på dåliga och ojämna vägar. Resultatet blev att stiften skakade loss och låg och rullade på brickorna när man anlände till grupperingsplatsen. Lösningen blev ett skyddslock som skruvades fast över brickan. Men denna lösning var inte helt perfekt. Conny Karlsson, Telub, berättar: Innan man kunde komma åt peggarna måste man avlägsna skyddslocket ovanpå programbrickan. Detta måste göras varsamt annars ville peggarna följa med brickan. Man lärde sig snart att knacka lite försiktig på locket efter att skruvarna avlägsnats så att peggarna lossnade från locket innan de lyfts ur sitt hål. De hade nämligen en förmåga att fastna med gummitoppen i locket vilket kunde medföra mycket arbete för återställning!
Datamaskinens uppgift
Datamaskinen har till uppgift att behandla in- och utgående data till robotgruppen, att utföra förinställningar och kontroller av vissa enheter och ge information till olika befattningshavare om systemets arbete. Ingångsdata kommer från följande källor:
- Lfc, via länk.
- Brr, som avstånd, bäring, elevation och doppplerfrekvens (hastighet).
- Fasta parameter, som robotens höjd, horisontella avstånd och dropvinkel vid raketfasens slut vid vindstilla förhållanden (med dropvinkelmenas att nosen på grund av en negativ hastighetsförändring, som uppstår när startraketerna fälls ut för att sedan brytas loss, viker sig något nedåt). Även robotens hastighet i förhållande till brr vid raketfasens slut. Raketsfasens längd i tid.
- Variabla parametrar som beror på omständigheterna, som våglängden på brr:s huvudsignal, avvikelsen mellan avståndet mellan brr och lavetten på grupperingsplatsen, värden på vindhastighet, bäring och lufttemperaturer som är inlagda i O-racken.
Utgångsdata från datamaskinen går till följande:
- Lfc
- Brr
- Robot
- Lavett
- Utrustning i rbgc
Omvandling av LFC-data
Måldata från Lfc överförs till rbgc som smalbandsöverföring SBÖ och meddelande i 100-serien användes, den första typen av meddelanden inom SBÖ och de var väldigt enkla. Meddelandena innehöll måldata och styrkommandon samt order och statusindikationer mellan Lfc och rbgc.
De måldata som datamaskinen tar emot från Lfc är angivna i strilsystemets koordinatsystem, dessa uppgifter är inte tillräckligt noggranna för att brr ska hitta målet. Datamaskinen omvandlar dessa uppgifter i två steg till polära koordinater som brr kan använda.
Styrning av lavett
De uppgifter som används av datamaskinen för att beräkna lavettens sidvinkel är dels fasta data och dels föränderliga data. Fasta är startraketernas brinntid och lavettens avstånd till brr, de föränderliga är måldatan, dvs. avstånd, sidvinkel, höjdvinkel och målfart uppmätt av brr. Måldatan matas från brr som elgonvärden till D-racken i rbgc där de omvandlas till digitala värden och överförs till datamaskinen via O-racken. Efter beräkning går signalen från rbgc:s lavettriktgivare till lavettens jämförarenhet och sedan till lavettservoförstärkaren i rbgc, där den omvandlas till en styrsignal till servoventilen i lavetten, denna ventil styr den hydraulmotor som vrider lavetten. Målsökarens antenn sidriktas alltså med lavetten, riktningsfelet får inte vara mer än ett par grader. Då antenngyrot har en viss tröghet kommer en sidriktning i samband med avfyring att få en viss eftersläpning, detta kompenseras med en girokorrektionssignal som motsvarar sidrikthastigheten. Denna signal framställs av datamaskinen.
Styrning av parabolantennen
Måldata matas från brr som elgonvärden till omvandlarstativet i rbgc där de omvandlas till digitala värden och överförs till datamaskinen via O-racken. De uppgifter som används av datamaskinen för att beräkna målsökarantennens tippvinkel är dels fasta data och dels föränderliga data. Fasta är lavettens höjdvinkel (alltid 34°), robotens avstånd från lavetten efter raketfasen, startraketernas brinntid och avståndet mellan lavett och brr. De föränderliga är lavettens sidvinkel samt måldatan, dvs. avstånd, sidvinkel, höjdvinkel och målfart uppmätt av brr. Inriktning i girled görs enbart med girokorrektionssignalen. Datamaskinen beräknar kontinuerligt målets framtida läge om 4 sekunder. I O-racken omvandlas gir- och girokorrektionssignal till en styrsignal för antennservot. Signalerna överförs via brr:s markreferensantenn till lavettens markreferensantenn och vidare till roboten. Efter avfyring sänds signalen via brr:s flygreferensantenn. I roboten delas signalen upp i tipp- resp. girsignal.
Beräkning av dopplerfrekvens
För att målsökaren ska låsa på målet krävs att dopplerfrekvensen är rätt inställd, denna utgörs av summan av målets dopplerfrekvens (uppmätt av belysningsradar) och robotens dopplerfrekvens. Den senare beräknas av datamaskinen, där tas hänsyn bl.a. till vindstyrka, vindriktning samt målets läge. Beräkning sker med utgångspunkt från data under de senaste 10 sekunderna.
Beräkning av flygprogram (läs mer om detta i det egna stycket flygprogram)
Vilket flygprogram som ska användas beräknas kontinuerligt av datamaskinen, denna ger genom fyra strömkretsar signal för inställning av omkopplare i roboten vilka dirigerar flygprogrammet.
Beräkning av bränsleräckvidd
Med hjälp av metrologiska värden, som programmerats i O-rackens konstantpanel samt måldata beräknas om bränslet räcker fram till målets beräknade position.
Efter avfyring beräknas bränsleräckvidd kontinuerligt. Indikering sker med lampor hos robotstridsledaren om den beräknade träffpunkten ligger inom robotens bränsleräckvidd.
Beräkning av tid till avfyring och tid till träff
Tid till avfyring beräknas för robotens bränsleräckvidd eller tiden när målsökarens beräknade signal/brusförhållande medger avfyring, dvs att signalen är tillräckligt stark.
Tid till träff beräknas under förutsättning att avfyringsknappen trycks ner i beräkningsögonblicket.
Initiering av robotens fullständiga syftesbäringsstyrning
Datamaskinen beräknar tidpunkten 30 sekunder till träffpunkt och initierar en ordersignal via belysningsradarens flygreferensantenn till roboten så att styrsystemet kopplar ur flygprogrammet.
Avfyringsblockeringar
Om en robot ska kunna avfyras måste datamaskinen skicka en klar-signal till rbgc. Signalen skickas när följande gäller:
- Datamaskinens kapacitet har inte överskridits under beräkning av träffpunkt, antenninriktningoch tid till avfyring.
- Den beräknade träffpunkten ligger inom robotens bränsleräckvidd.
- Den beräknade minimitiden till avfyring är lika med noll.
- Den beräknade minimitiden till avfyring är den längsta av två tider, 1) tiden till den beräknade träffpunkten kommer inom robotens bränsleräckvidd. 2) Tiden tills signalbrus- eller störbrusförhållandena beräknas vara större än tröskelvärderna, dessa värdenställs in av rbstriled som även kan förbikoppla dem.
- Att lavetten, målsökarantenn eller doppleroscillatorn i målsökaren inte lagts i beredskapsläge av datamaskinen.
- Att den ovillkorliga avfyringsspärren inte är i funktion. Denna spärr förhindrar all avfyring om någon av följande situationer uppstår.
1) Den beräknade träffpunkten ligger utanför den beräknade bränsleräckvidden (E-linjen i räckviddsdiagrammet).
2) Den beräknade träffpunkten ligger bakom Bj-linjen (flygprogram-mode B) och rbstriled har valt J-LINE på omkopplaren.
- Att den villkorliga avfyringsspärren inte är i funktion eller är förbikopplad av rbstriled. Denna spärr förhindrar avfyring om någon av följande situationer uppstår.
1) Den beräknade träffpunkten ligger mellan gränslinjerna D och E (alltså inom område med risk för bränslebrist).
2) Den beräknade träffpunkten ligger närmare än 9,26 kilometer.
3) Målhöjden är större än 21.336 meter.
Driftproblem och felsökning
Bo Lindberg, rbstriled på F 10, berättar att när datamaskinen dog så började man med att slå av och på strömmen ett flertal gånger, om detta inte hjälpte fick tekniker tillkallas.
Lars Gröön, rbgc-tekniker på Telub, samt senare på F 17, ger följande minnesbild av service på rbgc;
”Oftast när programmet spårade ur var det kontaktproblem mellan de olika kretskortens kontaktyta och anslutningskontakten i racken. Gick åt mycket tvättsprit och radergummi. Räckte med att knacka lätt på korten i aktuellt område för att identifiera syndaren.
Tror att en av de grundläggande orsakerna var att när man ”omgrupperade” och speciellt vintertid så blev det kallt i vagnen och fuktigt. När luftkonditionsapparaten avfuktade med hjälp av kylkompressionerna så tog det ett tag innan allt i vagnen kommit upp i temperatur och torkat. När man kunde starta blev alltid en källa till diskussion mellan stridsledning och tekniker.
Ett annat återkommande problem var ju peggarna i programbrickorna som blev slitna (blev som ett timglas) och den inducerade spänningen från ”skrivslinga” till lässlinga blev för låg med följd av att en binär etta blev en nolla.
På högersidan längst fram och längs bak fanns Elektriska värmefläktar som man använde innan luftkonditioneringen var igång, eller man parkerat över natt. Stöd för att få upp värmen och få bort kondens också.
Upplevde rbgc som driftsäkert och problemfritt. Var ju en del kontaktproblem enligt ovan. Fanns enheter/rackar som jag under mina 8 år som rbgc-tekniker aldrig felsökt i eller haft öppna. T,ex Demultiplexer, Multiplexer Andiomvandlarna. Tro inte jag bytt mer än ett tiotal kort i datamaskinen, ungefär lika mycket i övriga enheter. Lite mer att byta pegar samt trimma läsförstärkare.
Även innan när jag arbetade på Telub med att reparera kretskort från rgbc och radarn var det övervägande kort från radarn.
En stor källa till kortproblemen var en speciell elektrolytkondensator från Plessy som var silver-färgad med plussida rödmålad, såg ut som lösskjutningsskotten till kulsprutepistolen fast mindre. Vi kallade dem för lösplugg. Om man fick in ett kretskort där sådana var monterade, oftast flera, räckte det oftast att knacka lite försiktigt på dem för att hitta vilken som var boven alternativ att värma eller kyla lite.
Reglersystemet i Luftkonditionsenheten var ingen höjdare. Var två stegmotorer med en massa kamskivor som kopplade in de två kylkompressorerna eller värmeelement. Ofta byte av kyl-kompressorer och påfyllnad av kylmedia. Detta utfördes av extern service-personal från Telub.
Hjulmuttrarna var en källa till besvär, de lossnade alltid vilket innebär att vid varje rast under transport fick man efterdra dessa. Dragstången var alldeles för kort (och bara en balk, så det krävdes två man att lyfta den när man kopplade ett fordon till den) vilket gjorde det till en grannlaga uppgift att försöka backa vagnen, man fick noskoppla. Var också någon speciell framvagnskonstruktion som inte var av denna världen. Vagnarna följde inte dragbilen utan genade i kurvorna).
Som rgbc-tekniker fick man hantera RL-23 utrustningen också med tillhörande mast som skulle monteras och resas. Driftsäker utrustning. Var ansluten med 10-dl kabel någon km. Eftersom den inte fjärrstyrdes eller övervakades från rbgc så kunde det bli några km nattvandring mellan rbgc och länk innan man fått igång det. Oftast gick vi mot anslutningar i länksystemet som inte användes av andra, så felen låg oftast i länkstråken.
Radarn hade ju också med en mast där en målsimulator var monterad som man testade radarn med. Denna hade vi på rbgc-taket vid transport de sista åren.”
Conny Karlsson fortsätter;
”Problemet med timglas-peggar kommer jag inte ihåg, men jag minns att vi en gång fick order om att byta alla peggar på alla programbrickor. Detta jobb utfördes av personer på Risingeverkstaden och efter återmontering av programbrickorna i rbgc körde jag ett kontrollprogram och jämförde alla instruktioner mot kontrolldata på en hålremsa som tidigare utstansats från ett rbgc med problemfria programbrickor. Dessa kontrollprogram programmerade jag mot Facits hålremsstans och läsare som tidigare Telub-personal hade konstruerat för inkoppling till Argus-datorn. Till detta inkopplades en teletype för utskrift av instruktion och adress vid upptäckt fel på en programbricka.
Eftersom vår utrustning skulle vara transportabel monterades en täckbricka över peggarna för att dessa inte skulle skaka loss. Man fick dock vara försiktig när man lyfte av täckbrickan så att inte peggarna följde med upp, men knackade man först lätt på brickan innan man lyfte den så brukade det gå bra.”
Öde efter nedläggning
När nerläggning av robotdivisionerna på F 8, F 10 och F 12 genomfördes 1974 överfördes en rbgc (troligen 1001) från F 8 till F 17 för att användas som simulator tillsammans med brr 501. Efter systemets nedläggning byggdes sex stycken rbgc om till Op-vagn 44, de blev därmed operatörsvagnar till de brr som byggdes om till Ps-44. Dessa vagnar var 1006, 1007, 1009, 1010, 1011 samt 1012. När även Ps-44 lades ner gjordes försök att sälja vagnarna till England, men MOD var inte intresserade.
De vagnar som inte byggdes om till Op-vagnar, 1001-1005 samt 1008, skrotades på F13 1978. Vagnarna rensades på innehåll och all elektronik eldas upp enligt överenskommelse med MOD. Det cirkulerar en berättelse, som kan vara en skröna, att efter att elektroniken smält ihop till en stor klump metall ska engelsmännen krävt att denna klump krossades till små delar. Om detta är sant vet vi inte. Kan någon av våra läsare bringa klarhet i denna fråga är vi mycket intresserade av en kontakt med vederbörande.
Op-vagnarna skrotades på F 8 1983 efter att Ps-44 avvecklats. Bo Sundström, rbgc-tekniker på F 17, var med och plockade ur alla kretskort ur vagnarna. De antecknade kortets namn och nummer för att sedan skicka kretskorten till Telub. Listan skulle behållas tills besked kom att den kunde makuleras. När Bo gick i pension 2002 hade ännu inget besked kommit så då makulerade han handlingarna.
De tomma vagnarna gick vidare inom Flygvapnet, några vagnar ska enligt rykte flyttats till Gotland där de ska ha använts som personalutrymme.

F 13 1982. En Ps-44 och en Op-vagn 44. Foto via Flygvapenmuseum.
F 13 1982. En Ps-44 och en Op-vagn 44. Foto via Flygvapenmuseum.

Vid konvertering från rbgc till Op-vagn 44 skedde en del förändringar interiört. Här är systemövervakarens manöverbord ersatt av annan utrustning.
Bild via Arboga Robotmuseum.
En stor skillnaden för operatören var att den tidigare luftkonditioneringen ersattes av en modernare.
Bild via Arboga Robotmuseum.